轴承故障诊断模型的训练方法、诊断方法及诊断装置
1.本发明属于轴承故障诊断技术领域,具体涉及了一种轴承故障诊断模型的训练方法、诊断方法及诊断装置。
背景技术:
2.机械设备正在朝着大型化、精密化方向发展,智能化也日益提高,对设备运行中的可靠性也提出更高要求。作为旋转机械中的核心回转支承部件,其表面的轻微缺陷就可能导致整个装置系统的运行故障,造成巨大人员伤亡和财产损耗。传统的用于滚动轴承检测方法,需要工作人员定期从机械设备上将轴承拆卸下来进行安全检验,耗费大量人力物力,对工业生产进程造成影响。智能维护方案利用先进的传感器和检测技术,获得设备运行的状态信息,当故障发生时,也能通过建立物理与统计模型对设备的剩余寿命进行预测,并在设备完全失效前对设备展开维修工作。因此,开展轴承故障诊断和状态检测对提高设备运行的安全性有着重要意义。
3.轴承作为旋转机械的关键精密元件,各种复杂工况会使轴承出现疲劳剥落、裂纹、磨损、压痕等损伤,加剧轴承振动,产生安全隐患。为了减少事故的发生,有必要对轴承进行状态监测和故障诊断。
技术实现要素:
4.为解决上述技术问题,本发明提出一种轴承故障诊断模型的训练方法、诊断方法及诊断装置,以实现对轴承进行状态监测和故障诊断,从而避免轴承出现疲劳剥落、裂纹、磨损、压痕等损伤而加剧轴承振动,从而避免产生安全隐患。
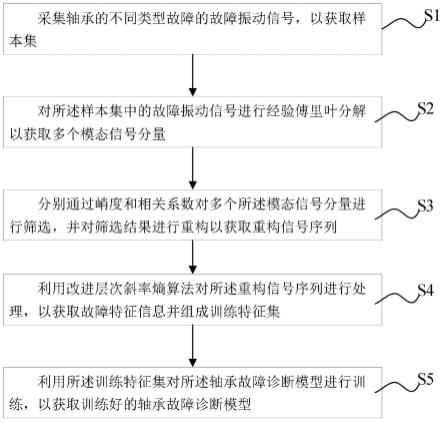
5.本发明提出一种轴承故障诊断模型的训练方法,包括:
6.采集轴承的不同类型故障的故障振动信号,以获取样本集;
7.对所述样本集中的故障振动信号进行经验傅里叶分解以获取多个模态信号分量;
8.分别通过峭度和相关系数对多个所述模态信号分量进行筛选,并对筛选结果进行重构以获取重构信号序列;
9.利用改进层次斜率熵算法对所述重构信号序列进行处理,以获取故障特征信息并组成训练特征集;
10.利用所述训练特征集对所述轴承故障诊断模型进行训练,以获取训练好的轴承故障诊断模型。
11.在本发明的一个实施例中,所述不同类型故障至少包括正常、内圈单点故障、外圈单点故障、滚子单点故障、外圈滚子复合故障、内圈滚子复合故障、内圈多点故障、外圈多点故障和滚珠多点故障。
12.在本发明的一个实施例中,所述对样本集进行经验傅里叶分解以获取多个模态信号分量的步骤包括:
13.将所述样本集内的故障振动信号的傅里叶谱归一化至[0,π]区间,预定义所需要
划分的频段数n;
[0014]
将傅里叶谱中的初值和极大值定为m个控制点,并根据所述频段数n和控制点数m获取最终控制点数t;
[0015]
按所述最终控制点数t来划分区间,并且每个控制点的位置为αn,其中,1≤n≤t,α1=0,α
t+1
=π;
[0016]
根据确定傅里叶分解的频谱分割边界ωn,定义前t个边界为min[α
t-1
,α
t
],其中λn为前t个边界的集合;
[0017]
确定连续区间ω=[ωi,ω
i+1
],并计算每个区间的解析傅里叶固有频带函数,其中i=1,2,
…
,t;
[0018]
对每个区间的解析傅里叶固有频带函数的实部进行傅里叶逆变换后,以获取多个模态信号分量。
[0019]
在本发明的一个实施例中,根据所述频段数n和控制点数m获取最终控制点数t包括:
[0020]
当m≥n时,只取m个控制点按降序排列的前n个分段,即最终控制点数t为n个;
[0021]
当m<n时,振动信号中能够被划分的频段小于预定义的频段数n,此时最终控制点数t为m个。
[0022]
在本发明的一个实施例中,通过峭度和相关系数对多个所述模态信号分量进行筛选以获取重构信号包括:
[0023]
计算各个模态信号分量的峭度值kurtn,并保留峭度值kurtn大于3的所有分量,以构成集合u;
[0024]
计算各个模态信号分量与所述故障振动信号y的相关系数ρn,并以相关系数ρn的标准差为最低阈值对各个所述模态信号分量进行筛选,作为故障振动信号的主要旋转分量,构成集合v;
[0025]
取集合u和集合v的并集并将其中的信号相加以得到重构信号序列。
[0026]
在本发明的一个实施例中,所述峭度值kurtn通过公式:
[0027]
计算得到,其中efd
n,k
为第n个模态信号分量的k点;n=1,2,
…
,t;k=1,2,
…
,l;u和σ为efdn的均值和方差;e[n]表示n的数学期望。
[0028]
在本发明的一个实施例中,所述相关系数ρn通过公式:
[0029]
计算得到,其中,表示第n个模态分量的平均值,zk表示故障振动信号z的第k个采样点,表示故障振动信号z所有采样点的均值。
[0030]
在本发明的一个实施例中,利用改进层次斜率熵算法对所述重构信号序列处理,
以获取故障特征信息并组成训练特征集包括:
[0031]
给定重构信号序列x={xi,i=1,2,
…
,l},并计算平均算子p0和差分算子p1:其中,xi表示第i个区间的重构信号;
[0032]
定义不同层数s下的算子(f=0或1),其中,
[0033][0034]
给定一个特定的向量序列[r1,r2,
…
,rs],并根据第s层的节点e确定每一层的f值,该节点e与所述向量序列的关系为:式中,{rd,d=1,2,
…
,s}∈{0,1}表示第d层的平均算子或差分算子;
[0035]
获取重构信号序列的层次分量,表示为:
[0036]
计算每个层次分量的改进层次斜率熵,表示为:mhse(x,m,s,e,γ,δ)=se(x
s,e
,m,γ,δ),式中m为嵌入维数,γ和δ为斜率熵的阈值。
[0037]
在本发明的一个实施例中,利用所述训练特征集对所述轴承故障诊断模型进行训练,以获取训练好的轴承故障诊断模型的步骤包括:
[0038]
所述训练特征集表示为{ui,i=1,2,
…
,p},定义输入层和隐藏层之间的权重为隐藏和输出层之间的权重为β,隐藏层阈值为b,p=2s*(m-1):
[0039]
b=[b1,b2,
…
,bq]
t
,式中,r、q、f分别是极限学习机的输入层、隐藏层、输出层的神经元数目;
[0040]
设定一激活函数g(x),则极限学习机的输出t
*
表示为:t
*
=hβ,式中
[0041]
求解其近似平方差的最小值,以获取输出层的权重为并求其最优解为β
*
=h
+
t
*
,式中,h
+
为隐藏层输出矩阵的广义逆。
[0042]
本发明还提出一种轴承故障诊断方法,包括:
[0043]
采集轴承的故障振动信号;
[0044]
对所述故障振动信号进行经验傅里叶分解以获取多个模态信号分量;
[0045]
分别通过峭度和相关系数对多个所述模态信号分量进行筛选,并对筛选结果进行重构以获取重构信号序列;
[0046]
利用改进层次斜率熵算法对所述重构信号序列进行处理,以获取故障特征信息;
[0047]
将所述故障特征信息输入到通过权利要求1至9中任意一项所述轴承故障诊断模型训练方法训练好的轴承故障诊断模型中,以获取轴承故障的诊断结果。
[0048]
本发明还提出一种轴承故障诊断装置,包括:
[0049]
故障信号采集模块,用于采集轴承的不同类型故障的故障振动信号,以获取样本集;
[0050]
模态信号获取模块,与所述故障信号采集模块连接,用于对所述样本集中的故障振动信号进行经验傅里叶分解以获取多个模态信号分量;
[0051]
信号重构模块,与所述模态信号获取模块连接,用于分别通过峭度和相关系数对多个所述模态信号分量进行筛选,并对筛选结果进行重构以获取重构信号序列;
[0052]
训练特征集获取模块,与所述信号重构模块连接,用于利用改进层次斜率熵算法对所述重构信号序列进行处理,以获取故障特征信息并组成训练特征集;
[0053]
模型构建模块,与所述训练特征集获取模块连接,用于利用所述训练特征集对所述轴承故障诊断模型进行训练,以获取训练好的轴承故障诊断模型;
[0054]
故障诊断模块,与所述模型构建模块连接,用于获取诊断结果。
[0055]
本发明提出一种轴承故障诊断模型的训练方法、诊断方法及诊断装置,利用经验傅里叶分解对滚动轴承故障信号进行预处理,可以滤除傅里叶频谱的噪声段,凸显时间序列的主振分量和冲击分量。
[0056]
本发明提出的改进层次斜率熵算法相对于粗粒化序列的方法,提取的时间序列尺度信息更加全面、丰富;同时,用斜率来度量时间序列差异,能够感知幅值变化的趋势和程度,相对排列熵(permutation entropy,pe)以幅值大小排序的方法更为有效。
[0057]
本发明提出一种轴承故障诊断模型的训练方法、诊断方法及诊断装置能够有效识别不同类型和损伤程度的轴承故障,平均识别率达99.74%。
附图说明
[0058]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0059]
图1为本发明提出的轴承故障诊断方法的流程框图。
[0060]
图2为本发明提出的轴承故障诊断方法的流程图。
[0061]
图3为时间序列差分与符号的关系。
[0062]
图4为当嵌入维数m=3时的符号序列模式。
[0063]
图5为本发明提出的轴承故障诊断方法中层次分解示意图。
[0064]
图6为本发明提出的轴承故障诊断装置的示意图。
[0065]
图7为本发明于一实施例中外圈多点故障经过模态分解得到的前5个分量波形图。
[0066]
图8为本发明于一实施例中9组故障样本mhse特征的t-sne可视化降维结果。
[0067]
图9为本发明于一实施例中测试集分类混淆矩阵。
具体实施方式
[0068]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。
[0069]
需要说明的是,本实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
[0070]
本发明提出一种轴承故障诊断模型的训练方法、诊断方法及诊断装置,以实现对轴承进行状态监测和故障诊断,从而避免轴承出现疲劳剥落、裂纹、磨损、压痕等损伤而加剧轴承振动,从而避免产生安全隐患,具体的,如图1及图2所示,所述诊断方法包括:
[0071]
s1、采集轴承的不同类型故障的故障振动信号,以获取样本集;
[0072]
s2、对所述样本集中的故障振动信号进行经验傅里叶分解以获取多个模态信号分量;
[0073]
s3、分别通过峭度和相关系数对多个所述模态信号分量进行筛选,并对筛选结果进行重构以获取重构信号序列;
[0074]
s4、利用改进层次斜率熵算法对所述重构信号序列进行处理,以获取故障特征信息并组成训练特征集;
[0075]
s5、利用所述训练特征集对所述轴承故障诊断模型进行训练,以获取训练好的轴承故障诊断模型;
[0076]
如图1及图2所示,在步骤s1中,通过采集轴承的不同类型的故障振动信号,以获取样本集,所述样本集用于训练并获取诊断模型。在本实施例中,所述不同类型故障至少包括正常、内圈单点故障、外圈单点故障、滚子单点故障、外圈滚子复合故障、内圈滚子复合故障、内圈多点故障、外圈多点故障和滚珠多点故障。
[0077]
如图1及图2所示,在步骤s2中,对所述样本集中的故障振动信号进行经验傅里叶分解以获取多个模态信号分量,其中,经验傅里叶分解通过改进的频谱分割技术划分频段,再构造零相位滤波器滤波,每个频段经过傅里叶逆变换后就可以得到振动信号分解分量。具体的,以获取多个模态信号分量的步骤包括:
[0078]
s21、将所述样本集内的故障振动信号进行傅里叶谱归一化至[0,π]区间内,并且预定义所需要划分的频段数n;
[0079]
s22、根据傅里叶谱中的初值和极大值定为m个控制点,并根据所述频段数n和控制点数m获取最终控制点数t;
[0080]
s23、按所述最终控制点数t来划分区间,并且每个控制点的位置为αn,其中,1≤n≤t,α1=0,α
t+1
=π;
[0081]
s24、根据确定傅里叶分解的频谱分割边界ωn,定义前t个边界为min[α
t-1
,α
t
],其中λn为前t个边界的集合;
[0082]
s25、确定连续区间ω=[ωi,ω
i+1
],并计算每个区间的解析傅里叶固有频带函数,其中i=1,2,
…
,t;
[0083]
s26、对每个区间的解析傅里叶固有频带函数的实部进行傅里叶逆变换后,以获取多个模态信号分量。
[0084]
如图1及图2所示,需要说明的是,所述最终控制点数t与所述频段数n和控制点数m的关系为:当m≥n时,只取m个控制点按降序排列的前n个分段,即最终控制点数t为n个;当m<n时,振动信号中能够被划分的频段小于预定义的频段数n,此时最终控制点数t为m个。
[0085]
如图1所示,按所述最终控制点数t来划分区间,并且每个控制点的位置为αn,其中,1≤n≤t,α1=0,α
t+1
=π;需要说明的是,t个区间共需t+1个边界,定义前t个边界min[α
t-1
,α
t
],前t个边界的集合为λn,第t+1个边界为α
t
和α
t+1
的中点,即可以确定傅里叶分解的频谱分割边界ωn,在步骤s25中,确定连续区间ω=[ωi,ω
i+1
],并计算每个区间的解析傅里叶固有频带函数,其中i=1,2,
…
,t。具体的,假设x[n]是长度为l的离散连续序列,其离散傅里叶形式可以记作:
[0086][0087]
式中,是序列x[n]的离散傅里叶变换,设l为偶数可知x[0]和均为实数。将其重写为:
[0088][0089]
式中,re{z1[n]}表示z1[n]的实部,z1[n]和z2[n]互为复共轭。解析信号z1[n]可以写成以下形式:
[0090][0091]
计算每个区间的解析傅里叶固有频带函数:
[0092]
式中,i=1,2,
…
,t。
[0093]
在步骤s26中,对每个区间的解析傅里叶固有频带函数的实部进行傅里叶逆变换后,分别获取每个区间对应的多个模态信号分量(efd分量)。
[0094]
如图1及图2所示,在步骤s3中,分别通过峭度和相关系数对多个所述模态信号分量进行筛选,并对筛选结果进行重构以获取重构信号序列,具体的,包括:
[0095]
s31、计算各个模态信号分量的峭度值kurtn,并保留峭度值kurtn大于3的所有分量,以构成集合u,其中,所述峭度值kurtn通过公式:
[0096]
计算得到,其中efd
n,k
为第n个模态信号分量的k点;n=1,2,
…
,t;k=1,2,
…
,l;u和σ为efdn的均值和方差;e[n]表示n的数学期望。
[0097]
s32、计算各个模态信号分量与所述故障振动信号y的相关系数ρn,并以相关系数ρn的标准差为最低阈值对各个所述模态信号分量进行筛选,作为故障振动信号的主要旋转分量,构成集合v,其中,所述相关系数ρn通过公式:
[0098]
计算得到,其中,表示第n个模态分量的平均值,zk表示故障振动信号z的第k个采样点,表示故障振动信号z所有采样点的均值。
[0099]
s33、取集合u和集合v的并集并将其中的信号相加以得到重构信号序列。
[0100]
针对排列熵对幅值信息的利用缺乏完备性的弊端,提出了基于符号和幅值信息的斜率熵(slope entropy,se),se采用类似线性量化的方式,通过定义阈值区间将序列元素之间的斜率分为不同的模式,以此衡量幅值的变化趋势,具体的,包括:
[0101]
首先假定一个时间序列y={yi,i=1,2,
…
,l},对其进行相空间重构后可得子序列列其中t=1,2,
…
,l-m+1,m为嵌入维数。定义垂直增量阈值γ,水平增量阈值δ。γ为一个较大的量,用来衡量向量序列之间的显著差异,以区分不同的涨落幅值;δ为一个非常小的数值,以此来归类近似等幅值的情况。其次对时间序列进行差分,通过阈值将子序列定义为不同的符号,图3展示了时间序列差分与符号的关系。
[0102]
当y
t+τ-y
τ
》γ时,定义符号为+2。
[0103]
当y
t+τ-y
τ
≥δ且y
t+τ-y
τ
《γ时,定义符号为+1。当γ=1时,此时的斜率变化相当于在[0,45
°
)范围内。
[0104]
当|y
t+τ-y
τ
|≤γ时,此时处于接近0差分的区域,定于符号为0。
[0105]
当y
t+τ-y
τ
≤-δ且y
t+τ-y
τ
》-γ时,定义符号为-1。当γ=1时,此时的斜率变化相当于在[-45
°
,0)范围内。
[0106]
当y
t+τ-y
τ
《-γ时,定义符号为-2。
[0107]
时间序列按如上定义后可得符号序列sm={si,i=1,2
…
,l-1},符号化的子空间可以表示为:其中l=1,2,
…
,l-m+2。把低于ε=m-1维的子空间也统计在内,可获得的维数分别为d=1,2
…
,∈,将其组成的序列模式记作:
[0108][0109]
其中为不同的维度的子空间。图4展示的是当嵌入维数m=3时的符号序列模式。统计每种序列模式中出现的排列模式总数zd,每种排列出现的次数为h
d,i
,可以得到相对应的概率为p
d,i
=h
d,i
/zd,其中i=1,2,
…
,zd。定义每种序列模式下的香农熵:
[0110][0111]
斜率熵可以表示为:
[0112]
se={sed,d=1,2,
…
,ε}。
[0113]
在本实施例中,如图1至图5所示,在步骤s4中,需要说明的是,层次熵(he)通过平均和差分方法获取隐含的高低频信息,但其分层过程需要保证数据长度l=2n(n是正整数)。同时层次熵会随着层次的增加而逐渐失去统计意义,降低了分解的可靠性,在本实施例中,利用改进层次斜率熵算法对所述重构信号序列处理,以获取故障特征信息并组成训练特征集,克服了以上两个缺点,提高了对序列尺度信息的提取能力。具体的,利用改进层次斜率熵算法对所述重构信号序列处理,以获取故障特征信息并组成训练特征集包括:
[0114]
s41、给定重构信号序列x={xi,i=1,2,
…
,l},并计算平均算子p0和差分算子p1:其中,xi表示第i个区间的重构信号;
[0115]
s42、定义不同层数s下的算子(f=0或1),其中,
[0116][0117]
s43、给定一个特定的向量序列[r1,r2,
…
,rs],并根据第s层的节点e确定每一层的f值,该节点e与所述向量序列的关系为:式中,{rd,d=1,2,
…
,s}∈{0,1}表示第d层的平均算子或差分算子;节点e可以对照图3,e从0开始,当s=1时,有两个节点0,1;当s=2时,有四个节点0,1,2,3。
[0118]
需要说明的是,为了获得时间序列的层次信息,需重复使用上述定义的算子特定的向量序列由式确定,例如第二层的第四个层次分量x
2,3
中2表示s=2,即第二
层;3表示e=3,即从0开始到3的第4个分量,即表示第二层中的第4个分量,由式:
[0119]
可得:x其实就是原始序列y,rd就是f,f只能取0或1。所以求x
2,3
的过程为:21*r1+20*r2=3,(r1,r2∈{0,1}),当r1=1,r2=1这个方程成立。
[0120]
根据每层的节点e确定这个节点对应的向量序列,不同层的每个节点都有对应的向量序列[r1,r2,
…
,rs],例如x
2,3
的向量序列[11],即r1=1,r2=1;x
3,3
的向量序列[110],即r1=1,r2=1,r3=0,即每层的e确定了从第一层到当前层的所有f值。
[0121]
s44、获取重构信号序列的层次分量,表示为:
[0122]
s45、计算每个层次分量的改进层次斜率熵,表示为:mhse(x,m,s,e,γ,δ)=se(x
s,e
,m,γ,δ),式中m为嵌入维数,γ和δ为斜率熵的阈值,其中,mhse的部分参数需要人为确定,分别是,嵌入维数m,分解层数s,阈值γ和δ,为了保证mhse至少包含两种符号模式,嵌入维数取m》2,本文选取m=3,且由于分解层数过大,则计算较为耗时,通常设置s=3。阈值γ和δ决定了序列斜率变化的分类区间,本文取γ=1,δ=0.001,其中,改进层次斜率熵即为训练特征集。
[0123]
如图1所示,在步骤s5中,利用所述训练特征集对所述轴承故障诊断模型进行训练,以获取训练好的轴承故障诊断模型的步骤,例如利用极限学习机进行训练构建诊断模型,即将训练特征集输入极限学习机,从而获取诊断模型。获取训练好的轴承故障诊断模型的步骤包括:
[0124]
所述训练特征集表示为{ui,i=1,2,
…
,p},定义输入层和隐藏层之间的权重为隐藏和输出层之间的权重为β,隐藏层阈值为b,p=2s*(m-1):
[0125]
b=[b1,b2,
…
,bq]
t
,式中,r、q、f分别是极限学习机的输入层、隐藏层、输出层的神经元数目,p的取值和所取的层次s和层次熵的嵌入维数m有关,即p=2s*(m-1);
[0126]
设定一激活函数g(x),则极限学习机的输出t
*
表示为:t
*
=hβ,式中需要说明的是,输入层乘以权重加上b,通过激活函数g(x)拟合后可以得到隐藏层h,其中,在[-1,1]之间随机取值,b在[0,1]之间随机取值。激活函数g(x)可以取sigmoid函数、tanh函数、sin函数等,例如为sigmoid函数,其表达形式为:使用激活函数可以逼近任意非线性函数,使得神经网络可以应用到众多非线性模型中。
[0127]
求解其近似平方差的最小值,以获取输出层的权重为并求其最优
解为β
*
=h
+
t
*
,式中,h
+
为隐藏层输出矩阵的广义逆。
[0128]
如图1所示,在本实施例中,本发明提出一种轴承故障诊断方法,利用上述实施例中构建的诊断模型对轴承故障进行诊断,包括:
[0129]
s61、采集轴承的故障振动信号;
[0130]
s62、对所述故障振动信号进行经验傅里叶分解以获取多个模态信号分量;
[0131]
s63、分别通过峭度和相关系数对多个所述模态信号分量进行筛选,并对筛选结果进行重构以获取重构信号序列;
[0132]
s64、利用改进层次斜率熵算法对所述重构信号序列进行处理,以获取故障特征信息;
[0133]
s65、将所述故障特征信息输入到通过上述轴承故障诊断模型训练方法训练好的轴承故障诊断模型中,以获取轴承故障的诊断结果。
[0134]
如图2所示,在一些实施例中,还可以将上述实施例中采集的故障振动信号和输出的诊断结果构建为测试集或另外构建测试集,并将该测试集作为诊断模型的输入以不断优化该诊断模型。
[0135]
如图6所示,本发明还提出一种轴承故障诊断装置,该装置应用了如上述实施例所描述的轴承故障诊断方法,具体的,所述诊断模型包括故障信号采集模块10、模态信号获取模块20、信号重构模块30、训练特征集获取模块40、模型构建模块50和故障诊断模块60。其中,故障信号采集模块10用于采集轴承的不同类型故障的故障振动信号,以获取样本集;模态信号获取模块20与所述故障信号采集模块10连接,用于对所述样本集中的故障振动信号进行经验傅里叶分解以获取多个模态信号分量;信号重构模块30与所述模态信号获取模块20连接,用于分别通过峭度和相关系数对多个所述模态信号分量进行筛选,并对筛选结果进行重构以获取重构信号序列;训练特征集获取模块40与所述信号重构模块30连接,用于利用改进层次斜率熵算法对所述重构信号序列进行处理,以获取故障特征信息并组成训练特征集;模型构建模块50与所述训练特征集获取模块40连接,用于利用所述训练特征集对所述轴承故障诊断模型进行训练,以获取训练好的轴承故障诊断模型;故障诊断模块60与所述模型构建模块50连接,用于将获取诊断结果。
[0136]
如图1所示,在本实施例中,实验轴承采用nsk型号为nu1010em(内圈可拆型)和n10-10em(外圈可拆型)的航空发动机轴承,通过激光打标机和走丝线切割机床加工出轴承元件损伤。轴承损伤类型包含健康、内圈、外圈、滚子单点和多点故障,以及外圈/滚子、内圈/滚子复合故障,一共9种状态,分别以数字1~9作为不同故障的类别标签,表1为它们的对应关系。
[0137]
表1轴承故障类型、数量及位置对应表
[0138][0139]
实验数据使用lms test.lab软件采集,采样频率为20480hz,轴承工况为轴向载荷3kn,转速3000rpm,将所有故障信号按每段1000个样本点进行数据分割,每种故障取100个样本,随机采用其中20个样本作为样本集,其余80个样本作为测试集,样本集样本共180个,测试集样本共720个,测试集用于测试训练好的诊断模型。
[0140]
首先对故障样本信号进行经验傅里叶分解,为了尽可能分离出噪声的频谱段,预定义频段数n=20。图7为外圈多点故障经过efd分解得到的前5个分量波形,经过分解重构的信号包含故障振动信号的主要频率和冲击频率。滚动轴承故障信号经过分解重构后,通过mhse算法进行特征提取,每个样本可以得到16维的特征向量。图8为9组故障样本mhse特征的t-sne(t-distributed stochastic neighbor embedding)可视化降维结果,数字1~9分别对应不同的故障类型标签。由图8可知,9种故障内类特征紧凑,除标签5的部分特征距离标签7较近,其余故障之间区分度明显。从整体上看,mhse算法能够有效表征不同的故障类型以及损伤程度。
[0141]
同时,在本实施例中,为了验证改进层次斜率熵算法的特征提取性能,将其和现有的5种算法进行对比,分别为改进的层次排列熵(mhpe)、精细复合多尺度散布熵(refined composite multiscale d-ispersion entropy,rcmde)、精细复合多尺度样本熵(refined composite multis-cale samlpeentorpy,rcmse)、精细复合多尺度模糊熵(refined composite mult-iscale fuzzy entorpy,rcmfe)、复合多尺度加权排列熵(composite multiscale weighted permutation entropy,cwmpe),种算法的具体参数设置见表2。
[0142]
表2五种算法的具体参数
[0143][0144]
在提取重构信号特征后,使用轮廓系数和戴维森堡丁指数(dbi)联合评价不同方法的整体聚类特性。轮廓系数通过定义凝聚度和离散度来衡量数据之间的距离,取值范围分布在[0,1]内,数值越接近1,说明类内离散度越小,类间离散度越大。dbi是类与类之间最大相似的均值,通常情况下数值越小,则表明类间差异越大,分类效果越好,种指标的评价结果和单个样本的计算时间如表3所示。
[0145]
表3两种指标的评价结果和单个样本的计算时间
[0146][0147]
由表3可见,6种算法中mhse的两种指标都为最优,呈现出较好的线性聚类特性。在相同采样点的样本计算耗时上,mhse仅次于rcmde,虽然rcmde运算速率最快,但其线性聚类特性要大幅低于mhse。
[0148]
另外,在本实施例汇总,为了验证本文滚动轴承故障诊断方法的效果,将9种健康状态的故障特征输入极限学习机进行分类实验。极限学习机的激活函数采用sigmoid函数,神经元数目分别设置为:输入层r=16,隐藏层q=30,输出层f=1。图9为一次实验的混淆矩阵,横坐标1~9代表预测的9种轴承状态,纵坐标1~9代表实际的9种轴承故障,对角线代表每种故障的预测正确率。由图9可知,720个故障测试样本中仅有1个样本被误分为其他类型,从类型上看,标签7的内圈多点故障被诊断为内圈单点故障。本次实验的分类正确率达到99.86%,验证了本文方法的有效性。
[0149]
为了进一步突出本文方法的性能,将mhse和特征提取实验的5种算法进行对比。表4列出的为每种方法实验10次的平均正确率及相应的标准差。
[0150]
表4每种方法实验10次的平均正确率及相应的标准差
[0151][0152]
由表4可知,mhse的平均正确率达到99.74%,标准差为0.103,与mhpe、rcmde、rcmse、rcmfe、cwmpe相比,mhse的标准差最小,平均正确率分别提升了3.35%、3.89%、6.7%、3.59%、3.24%。从实验结果来看,本文方法能够有效区分单一型和复合型滚动轴承故障,对不同损伤程度的故障也有良好的区分度,识别准确率和稳定性均优于其余5种算法。
[0153]
综上,本发明提出一种轴承故障诊断模型的训练方法、诊断方法及诊断装置,利用经验傅里叶分解对滚动轴承故障信号进行预处理,可以滤除傅里叶频谱的噪声段,凸显时间序列的主振分量和冲击分量。
[0154]
本发明提出的改进层次斜率熵算法相对于粗粒化序列的方法,提取的时间序列尺度信息更加全面、丰富;同时,用斜率来度量时间序列差异,能够感知幅值变化的趋势和程度,相对排列熵(permutation entropy,pe)以幅值大小排序的方法更为有效。
[0155]
本发明提出一种轴承故障诊断方法能够有效识别不同类型和损伤程度的轴承故障,平均识别率达99.74%。
[0156]
以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明,本领域技术人员应当理解,本技术中所涉及的范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案,例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
[0157]
除说明书所述的技术特征外,其余技术特征为本领域技术人员的已知技术,为突出本发明的创新特点,其余技术特征在此不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1