一种齿轮箱齿轮故障自动诊断方法及系统与流程
1.本发明涉及机械设备状态监测领域,特别是涉及一种齿轮箱齿轮故障自动诊断方法及系统。
背景技术:
2.齿轮箱设备具有传动平稳、结构紧凑且灵活多样的特点,被广泛地应用于工业领域,同时齿轮箱的运行状态及故障情况也受到了广泛的关注。其原因在于:a)齿轮箱的结构复杂,通常由多组轴、轴承、齿轮组成,故障类型较多且任何部件出现故障都会影响整个设备安全、稳定运行;b)齿轮箱的结构紧凑,故障易造成连锁故障,如一个齿轮箱发生了断齿可能会造成多对齿轮都发生断齿现象;c)对于关键齿轮传动设备或造价较高的齿轮箱传动设备,当齿轮发生故障时造成的停机或停产会造成很大的经济损失。因此,实时掌握齿轮箱的运行状态,提前预知齿轮故障对企业安全高效生产意义重大。振动监测作为旋转机械状态检测的有效工具,已被广泛接受,对于齿轮箱不同故障的振动表现上设备状态监测领域的从业者也做了很多理论和实践上的研究,齿轮箱故障机理及诊断分析方法也相对成熟。根据齿轮箱故障机理,在齿轮箱发生齿轮故障、轴承故障以及轴系故障时都会有不同的故障表现,如齿轮出现齿形误差、磨损、点蚀以及断齿时,通常齿轮故障时齿轮啮合频率会出现明显的增大,且部分故障也会调制啮合频率,在啮合频率旁出现明显的边频成分;在齿轮箱发生轴承故障时也会出现冲击机调制现象,但调制频率为轴承故障频率;在齿轮箱发生轴系相关问题时,主要的表现为低频部分的轴系相关故障频率(转频及其谐频等)。
3.目前,齿轮箱的故障诊断方式仍主要通过人工对振动数据进行分析实现,但该方式效率较低,且人工诊断经验不同可能会造成不同的诊断结论,诊断结果的可靠性较差。
技术实现要素:
4.基于此,本发明实施例提供一种齿轮箱齿轮故障自动诊断方法及系统,以提高齿轮故障诊断的效率和可靠性。
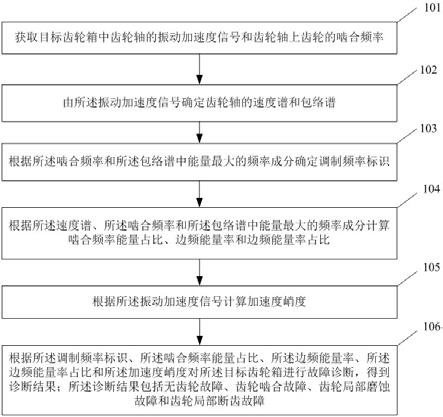
5.为实现上述目的,本发明提供了如下方案:一种齿轮箱齿轮故障自动诊断方法,包括:获取目标齿轮箱中齿轮轴的振动加速度信号和齿轮轴上齿轮的啮合频率;由所述振动加速度信号确定齿轮轴的速度谱和包络谱;根据所述啮合频率和所述包络谱中能量最大的频率成分确定调制频率标识;根据所述速度谱、所述啮合频率和所述包络谱中能量最大的频率成分计算啮合频率能量占比、边频能量率和边频能量率占比;根据所述振动加速度信号计算加速度峭度;根据所述调制频率标识、所述啮合频率能量占比、所述边频能量率、所述边频能量率占比和所述加速度峭度对所述目标齿轮箱进行故障诊断,得到诊断结果;所述诊断结果包括无齿轮故障、齿轮啮合故障、齿轮局部磨蚀故障和齿轮局部断齿故障;
所述根据所述调制频率标识、所述啮合频率能量占比、所述边频能量率、所述边频能量率占比和所述加速度峭度对所述目标齿轮箱进行故障诊断,得到诊断结果,具体包括:若所述目标齿轮箱满足第一判断条件,则确定无齿轮故障;所述第一判断条件为所述啮合频率能量占比小于或等于第一设定阈值;若所述目标齿轮箱满足第二判断条件,则确定存在齿轮啮合不良故障;所述第二判断条件为所述啮合频率能量占比大于第一设定阈值且所述加速度峭度小于或等于第二设定阈值;若所述目标齿轮箱满足第三判断条件,则确定存在第一复合故障;所述第一复合故障为齿轮啮合不良和轴承损伤复合的故障;所述第三判断条件为所述啮合频率能量占比大于第一设定阈值、所述加速度峭度大于第二设定阈值且所述调制频率标识为0;若所述目标齿轮箱满足第四判断条件,则确定存在第二复合故障,所述第二复合故障为齿轮啮合不良和轴承松动复合的故障;所述第四判断条件为所述啮合频率能量占比大于第一设定阈值、所述加速度峭度大于第二设定阈值、所述调制频率标识为1且所述边频能量率占比小于或等于第三设定阈值;所述齿轮啮合故障包括所述齿轮啮合不良故障、所述第一复合故障和所述第二复合故障;若所述目标齿轮箱满足第五判断条件,则确定存在齿轮局部磨蚀故障;所述第五判断条件为所述啮合频率能量占比大于第一设定阈值、所述加速度峭度大于第二设定阈值、所述调制频率标识为1、所述边频能量率占比大于第三设定阈值且所述边频能量率小于或等于第四设定阈值;若所述目标齿轮箱满足第六判断条件,则确定存在齿轮局部断齿故障;所述第六判断条件为所述啮合频率能量占比大于第一设定阈值、所述加速度峭度大于第二设定阈值、所述调制频率标识为1、所述边频能量率占比大于第三设定阈值且所述边频能量率大于第四设定阈值。
6.可选的,所述获取目标齿轮箱中齿轮轴的振动加速度信号和齿轮轴上齿轮的啮合频率,具体包括:采用振动加速度传感器采集齿轮轴的振动加速度信号;所述振动加速度传感器安装在目标齿轮箱中齿轮轴轴承位置;获取齿轮轴的转频和齿轮轴上的齿轮齿数;由所述齿轮轴的转频和所述齿轮齿数计算相应齿轮轴上齿轮的啮合频率。
7.可选的,所述由所述振动加速度信号确定齿轮轴的速度谱和包络谱,具体包括:对所述振动加速度信号进行带通滤波,并对带通滤波后的振动加速度信号进行积分,得到速度信号;对所述速度信号进行快速傅里叶变换,得到速度谱;对所述振动加速度信号进行高通滤波,并对高通滤波后的振动加速度信号进行希尔伯特变换,得到包络信号;对所述包络信号进行快速傅里叶变换,得到包络谱。
8.可选的,所述根据所述啮合频率和所述包络谱中能量最大的频率成分确定调制频率标识,具体包括:采用窄带窗口计算所述包络谱中能量最大的频率成分;
由齿轮轴的转频、所述啮合频率和所述包络谱中能量最大的频率成分三者之间的关系确定调制频率标识。
9.可选的,所述根据所述速度谱、所述啮合频率和所述包络谱中能量最大的频率成分计算啮合频率能量占比、边频能量率和边频能量率占比,具体包括:根据所述速度谱和所述啮合频率计算一倍啮合频率的能量和两倍啮合频率的能量之和在整个频带能量中的占比,得到啮合频率能量占比;根据所述速度谱、所述啮合频率和所述包络谱中能量最大的频率成分计算第一能量比和第二能量比,并将所述第一能量比和所述第二能量比中的最大值确定为边频能量率;所述第一能量比为一倍啮合频率的边频的能量与一倍啮合频率的能量之比;所述第二能量比为两倍啮合频率的边频的能量与两倍啮合频率的能量之比;根据所述速度谱、所述啮合频率和所述包络谱中能量最大的频率成分计算第一能量与第二能量之和在整个频带能量中的占比,得到边频能量率占比;所述第一能量为一倍啮合频率的能量与一倍啮合频率的边频的能量之和;所述第二能量为两倍啮合频率的能量与两倍啮合频率的边频的能量之和。
10.可选的,所述由齿轮轴的转频、所述啮合频率和所述包络谱中能量最大的频率成分三者之间的关系确定调制频率标识,具体包括:当所述包络谱中能量最大的频率成分与齿轮轴的转频相等时,则确定调制频率标识为1;当所述啮合频率是所述包络谱中能量最大的频率成分的整数倍且所述包络谱中能量最大的频率成分小于0.5倍的齿轮轴的转频时,则确定调制频率标识为1;当所述啮合频率不是所述包络谱中能量最大的频率成分的整数倍时,则确定调制频率标识为0。
11.可选的,所述第一设定阈值为0.4;所述第二设定阈值为2.8;所述第三设定阈值为0.5;所述第四设定阈值为0.5。
12.本发明还提供了一种齿轮箱齿轮故障自动诊断系统,包括:数据获取模块,用于获取目标齿轮箱中齿轮轴的振动加速度信号和齿轮轴上齿轮的啮合频率;速度谱包络谱确定模块,用于由所述振动加速度信号确定齿轮轴的速度谱和包络谱;第一指标确定模块,用于根据所述啮合频率和所述包络谱中能量最大的频率成分确定调制频率标识;第二指标确定模块,用于根据所述速度谱、所述啮合频率和所述包络谱中能量最大的频率成分计算啮合频率能量占比、边频能量率和边频能量率占比;第三指标确定模块,用于根据所述振动加速度信号计算加速度峭度;故障诊断模块,用于根据所述调制频率标识、所述啮合频率能量占比、所述边频能量率、所述边频能量率占比和所述加速度峭度对所述目标齿轮箱进行故障诊断,得到诊断结果;所述诊断结果包括无齿轮故障、齿轮啮合故障、齿轮局部磨蚀故障和齿轮局部断齿故障;所述根据所述调制频率标识、所述啮合频率能量占比、所述边频能量率、所述边频
能量率占比和所述加速度峭度对所述目标齿轮箱进行故障诊断,得到诊断结果,具体包括:若所述目标齿轮箱满足第一判断条件,则确定无齿轮故障;所述第一判断条件为所述啮合频率能量占比小于或等于第一设定阈值;若所述目标齿轮箱满足第二判断条件,则确定存在齿轮啮合不良故障;所述第二判断条件为所述啮合频率能量占比大于第一设定阈值且所述加速度峭度小于或等于第二设定阈值;若所述目标齿轮箱满足第三判断条件,则确定存在第一复合故障;所述第一复合故障为齿轮啮合不良和轴承损伤复合的故障;所述第三判断条件为所述啮合频率能量占比大于第一设定阈值、所述加速度峭度大于第二设定阈值且所述调制频率标识为0;若所述目标齿轮箱满足第四判断条件,则确定存在第二复合故障,所述第二复合故障为齿轮啮合不良和轴承松动复合的故障;所述第四判断条件为所述啮合频率能量占比大于第一设定阈值、所述加速度峭度大于第二设定阈值、所述调制频率标识为1且所述边频能量率占比小于或等于第三设定阈值;所述齿轮啮合故障包括所述齿轮啮合不良故障、所述第一复合故障和所述第二复合故障;若所述目标齿轮箱满足第五判断条件,则确定存在齿轮局部磨蚀故障;所述第五判断条件为所述啮合频率能量占比大于第一设定阈值、所述加速度峭度大于第二设定阈值、所述调制频率标识为1、所述边频能量率占比大于第三设定阈值且所述边频能量率小于或等于第四设定阈值;若所述目标齿轮箱满足第六判断条件,则确定存在齿轮局部断齿故障;所述第六判断条件为所述啮合频率能量占比大于第一设定阈值、所述加速度峭度大于第二设定阈值、所述调制频率标识为1、所述边频能量率占比大于第三设定阈值且所述边频能量率大于第四设定阈值。
13.可选的,所述数据获取模块,具体包括:振动数据采集单元,用于采用振动加速度传感器采集齿轮轴的振动加速度信号;所述振动加速度传感器安装在目标齿轮箱中齿轮轴轴承位置;静态参数获取单元,用于获取齿轮轴的转频和齿轮轴上的齿轮齿数;啮合频率计算单元,用于由所述齿轮轴的转频和所述齿轮齿数计算相应齿轮轴上齿轮的啮合频率。
14.与现有技术相比,本发明的有益效果是:本发明实施例提出了一种齿轮箱齿轮故障自动诊断方法及系统,根据振动加速度信号以及由振动加速度信号确定的速度谱和包络谱,计算调制频率标识、啮合频率能量占比、边频能量率、边频能量率占比和加速度峭度这五个特征指标,并根据计算的五个特征指标自动实现对目标齿轮箱的故障诊断,解决了人工诊断效率低,且人工经验不统一造成的诊断结论不一致的问题,提高了齿轮故障诊断的效率和可靠性。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图
获得其他的附图。
16.图1为本发明实施例提供的齿轮箱齿轮故障自动诊断方法的流程图;图2为本发明实施例提供的齿轮箱齿轮故障自动诊断方法的具体实现过程示意图;图3为本发明实施例提供的啮合频率能量占比的计算方法示意图;图4为本发明实施例提供的边频能量率占比的计算方法示意图;图5为本发明实施例提供的边频能量率的计算方法示意图;图6a为本发明实施例提供的齿轮啮合故障的频谱示意图;图6b为本发明实施例提供的齿轮局部磨蚀故障的频谱示意图;图6c为本发明实施例提供的齿轮局部断齿故障的频谱示意图;图7a为本发明实施例提供的波形1的频谱图;图7b为本发明实施例提供的波形2的频谱图;图7c为本发明实施例提供的波形3的频谱图;图7d为本发明实施例提供的波形4的频谱图;图8为本发明实施例提供的齿轮箱齿轮故障自动诊断系统的结构图。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
19.现有的齿轮箱的故障诊断方式主要通过人工的方式实现,其存在效率较低、可靠性较差的问题。在成熟的齿轮箱故障诊断机理及专家诊断经验背景下,若能将故障表现数字化、特征化形成一种齿轮箱故障自动诊断方法是十分有意义的。因此,本实施例提出了一种齿轮箱齿轮故障自动诊断方法,在齿轮箱参数(齿数、转速等)已知的情况,该方法可在齿轮箱出现异常时对齿轮箱故障进行自动判断,得到该齿轮箱故障的大致方向,从而提高齿轮箱故障的诊断效率和诊断可靠性。
20.图1为本发明实施例提供的齿轮箱齿轮故障自动诊断方法的流程图。参见图1,本实施例的齿轮箱齿轮故障自动诊断方法,包括:步骤101:获取目标齿轮箱中齿轮轴的振动加速度信号和齿轮轴上齿轮的啮合频率。
21.所述步骤101,具体包括:1)采用振动加速度传感器采集齿轮轴的振动加速度信号;所述振动加速度传感器安装在目标齿轮箱中齿轮轴轴承位置。
22.2)获取齿轮轴的转频和齿轮轴上的齿轮齿数。
23.3)由所述齿轮轴的转频和所述齿轮齿数计算相应齿轮轴上齿轮的啮合频率,计算公式为:fgmf
=rotate_freq*gtnum
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中,f
gmf
表示齿轮的啮合频率;rotate_freq表示齿轮轴的转频;gtnum表示齿轮齿数。
24.步骤102:由所述振动加速度信号确定齿轮轴的速度谱和包络谱。
25.所述步骤102,具体包括:1)对所述振动加速度信号进行带通滤波,并对带通滤波后的振动加速度信号进行积分,得到速度信号;对所述速度信号进行快速傅里叶变换(fft),得到速度谱vel_f_sig。其中,采用的带通滤波器的上限截止频率为1khz,下限截止频率为10hz。
26.2)对所述振动加速度信号进行高通滤波,并对高通滤波后的振动加速度信号进行希尔伯特变换,得到包络信号;对所述包络信号进行快速傅里叶变换(fft),得到包络谱enve_f_sig。其中,采用的高通滤波器的下限截止频率为10hz。
27.步骤103:根据所述啮合频率和所述包络谱中能量最大的频率成分确定调制频率标识。
28.所述步骤103,具体包括:1)采用窄带窗口计算所述包络谱中能量最大的频率成分。
29.2)由齿轮轴的转频、所述啮合频率和所述包络谱中能量最大的频率成分三者之间的关系确定调制频率标识mod_flag。具体为:当所述包络谱中能量最大的频率成分与齿轮轴的转频相等时,则确定调制频率标识为1,即mod_flag=1;当所述啮合频率是所述包络谱中能量最大的频率成分的整数倍且所述包络谱中能量最大的频率成分小于0.5倍的齿轮轴的转频时,则确定调制频率标识为1,即mod_flag=1;当所述啮合频率不是所述包络谱中能量最大的频率成分的整数倍时,则确定调制频率标识为0,即mod_flag=0。
30.步骤104:根据所述速度谱、所述啮合频率和所述包络谱中能量最大的频率成分计算啮合频率能量占比、边频能量率和边频能量率占比。
31.所述步骤104,具体包括:1)根据所述速度谱和所述啮合频率计算一倍啮合频率的能量和两倍啮合频率的能量之和在整个频带能量中的占比,得到啮合频率能量占比gmf_energy_ratio,其计算公式为:(2)其中,vel_f_sig(f
gme
)表示速度谱中啮合频率f
gme
对应的幅值;vel_f_sig(2*f
gme
)表示速度谱中两倍啮合频率2*f
gme
对应的幅值;vel_f_sig(f)表示速度谱中整个频带内的频率f对应的幅值;(vel_f_sig(f
gme
))2表示一倍啮合频率的能量;(vel_f_sig(2*f
gme
))2表示两倍啮合频率的能量;表示整个频带能量;f s表示信号采样频率。
32.2)根据所述速度谱、所述啮合频率和所述包络谱中能量最大的频率成分计算第一能量比gmf_1_ser和第二能量比gmf_2_ser,并将所述第一能量比和所述第二能量比中的最大值确定为边频能量率ser。所述第一能量比gmf_1_ser为一倍啮合频率的边频的能量与一倍啮合频率的能量之比;所述第二能量比gmf_2_ser为两倍啮合频率的边频的能量与两倍啮合频率的能量之比。第一能量比gmf_1_ser、第二能量比gmf_2_ser边频能量率以及边频能量率ser的计算公式为:(3)其中,enve_maxfreq表示包络谱中能量最大的频率成分;k表示enve_maxfreq的系数;vel_f_sig(f
gme
+k*enve_maxfreq)表示速度谱中啮合频率f
gme
与k倍的enve_maxfreq的频率之和对应的幅值;表示一倍啮合频率的边频的能量;vel_f_sig(2*f
gme
+k*enve_maxfreq)表示速度谱中两倍啮合频率2*f
gme
与k倍的enve_maxfreq的频率之和对应的幅值;表示两倍啮合频率的边频的能量。
33.3)根据所述速度谱、所述啮合频率和所述包络谱中能量最大的频率成分计算第一能量与第二能量之和在整个频带能量中的占比,得到边频能量率占比sum_side_ratio;所述第一能量为一倍啮合频率的能量与一倍啮合频率的边频的能量之和;所述第二能量为两倍啮合频率的能量与两倍啮合频率的边频的能量之和。边频能量率占比sum_side_ratio的计算公式为:(4)
步骤105:根据所述振动加速度信号计算加速度峭度。其中,加速度峭度acc_kurtosis的计算公式为:(5)其中,acc_sigi表示振动加速度传感器单次测得的振动加速度信号中的第i个采样值;n表示采样点数,即振动加速度信号的采样长度。
34.步骤106:根据所述调制频率标识、所述啮合频率能量占比、所述边频能量率、所述边频能量率占比和所述加速度峭度对所述目标齿轮箱进行故障诊断,得到诊断结果;所述诊断结果包括无齿轮故障、齿轮啮合故障、齿轮局部磨蚀故障和齿轮局部断齿故障。
35.所述步骤106,具体包括:若所述目标齿轮箱满足第一判断条件,则确定无齿轮故障;所述第一判断条件为所述啮合频率能量占比小于或等于第一设定阈值。
36.若所述目标齿轮箱满足第二判断条件,则确定存在齿轮啮合不良故障;所述第二判断条件为所述啮合频率能量占比大于第一设定阈值且所述加速度峭度小于或等于第二设定阈值。
37.若所述目标齿轮箱满足第三判断条件,则确定存在第一复合故障;所述第一复合故障为齿轮啮合不良和轴承损伤复合的故障;所述第三判断条件为所述啮合频率能量占比大于第一设定阈值、所述加速度峭度大于第二设定阈值且所述调制频率标识为0。
38.若所述目标齿轮箱满足第四判断条件,则确定存在第二复合故障,所述第二复合故障为齿轮啮合不良和轴承松动复合的故障;所述第四判断条件为所述啮合频率能量占比大于第一设定阈值、所述加速度峭度大于第二设定阈值、所述调制频率标识为1且所述边频能量率占比小于或等于第三设定阈值;所述齿轮啮合故障包括所述齿轮啮合不良故障、所述第一复合故障和所述第二复合故障。
39.若所述目标齿轮箱满足第五判断条件,则确定存在齿轮局部磨蚀故障;所述第五判断条件为所述啮合频率能量占比大于第一设定阈值、所述加速度峭度大于第二设定阈值、所述调制频率标识为1、所述边频能量率占比大于第三设定阈值且所述边频能量率小于或等于第四设定阈值。
40.若所述目标齿轮箱满足第六判断条件,则确定存在齿轮局部断齿故障;所述第六判断条件为所述啮合频率能量占比大于第一设定阈值、所述加速度峭度大于第二设定阈值、所述调制频率标识为1、所述边频能量率占比大于第三设定阈值且所述边频能量率大于第四设定阈值。
41.其中,所述第一设定阈值为0.4;所述第二设定阈值为2.8;所述第三设定阈值为0.5;所述第四设定阈值为0.5。
42.在实际应用中,上述齿轮箱齿轮故障自动诊断方法的一个具体实现过程如下:为了解决齿轮箱故障人工诊断效率低,且人工经验不统一造成诊断结论不一致等
问题,本实施例的齿轮箱齿轮故障自动诊断方法,首先根据齿轮箱结构在各轴轴承位置安装振动加速度传感器,实时采集齿轮箱的振动信号,振动信号应至少包括:速度信号、加速度、包络信号;再次结合齿轮故障机理以及齿轮故障振动典型特征,在采集信号的时域及频域中提取相应的特征指标(齿轮故障识别指标);最后,通过特征指标自动识别齿轮箱齿轮故障。该方法的具体实现过程如下:步骤一:采集齿轮箱振动测点信号以及收集齿轮箱的静态参数。
43.根据监测需求,在需要监测的齿轮轴轴承位置安装振动加速度传感器,实时采集该测点的振动加速度信号acc_sig;同时获取该齿轮轴的转频rotate_freq以及该齿轮轴上的齿轮齿数gtnum,并根据公式(1)计算该齿轮轴上齿轮的啮合频率f
gmf
,(对于齿轮轴存在多对齿轮副的情况,则根据齿轮轴上各齿轮副的齿轮齿数计算相应的啮合频率,本实施例以其中齿轮轴上一个齿轮副为例,其它齿轮副的齿轮故障诊断方法相同)。
44.步骤二:对原始的振动加速度信号进行处理对原始的振动加速度信号acc_sig进行带通滤波,滤波器的上限截止频率为1khz和下限截止频率为10hz,滤波后的信号进行积分获得速度信号vel_sig,并对速度信号进行fft,得到速度谱vel_f_sig。
45.对原始的振动加速度信号acc_sig进行高通滤波,滤波器的下限截止频率为1khz,滤波后的信号进行hilbert变换得到包络信号enve_sig,并对速度信号进行fft,得到包络谱enve_f_sig。
46.步骤三:根据齿轮箱齿轮故障机理以及振动特征提取相应的齿轮故障识别指标。
47.齿轮出现齿形误差、磨损、点蚀以及断齿时,通常齿轮发生故障时齿轮啮合频率均会出现明显的增大,在出现齿轮齿形误差以及均匀磨损时通常啮合频率周围边频幅值很小或无边频成分;在齿轮出现局部故障如局部点蚀、局部磨损时通常啮合频率周围出现边频成分,边频成分为故障齿轮转频,边频幅值较高但数量不多;在齿轮出现局部断齿时通常啮合频率周围出现边频成分,边频成分为故障齿轮转频,边频幅值较高且数量很多。针对不同齿轮故障的典型的频谱特征,可在监测信号上提取出相应的特征指标。
48.①
第一个特征指标为调制频率标识mod_flag,计算方法如下:在enve_f_sig中利用滑动的wnum倍窄带窗口获得滑动窄带窗口能量最大的频率成分enve_maxfreq。通过齿轮轴的转频rotate_freq、啮合频率f
gmf
和包络谱中能量最大的频率成分enve_maxfreq之间的关系确定调制频率标识mod_flag:当enve_maxfreq等于rotate_freq时,mod_flag=1;当f
gmf
是enve_maxfreq的整数倍且enve_maxfreq小于0.5倍的rotate_freq时,mod_flag=1;当f
gmf
不是enve_maxfreq的整数倍时,mod_flag=0。
49.enve_maxfreq的计算过程如下:包络的频率序列f_enve_list的第n个频率成分fn,fn的m倍窄带窗内频率对应的频率序列为[m*f
n-2*
∆
f :m*f
n-2*
∆
f],对应频率fn的对应的滑动窄带窗口能量计算公式为:(6)
其中,
∆
f为包络谱的频谱分辨率;enve_f_sig(m*f
n-j*
∆
f)为包络谱对应频率m*f
n-j*
∆
f的幅值;m表示fn的系数;j表示
∆
f的系数;wnum根据计算效果确定,通常定为4;最大的滑动窄带窗能量max(energy_fn)对应的频率即为enve_maxfreq。
[0050]
②
第二个特征指标为啮合频率能量占比gmf_energy_ratio,其计算公式如公式(2)所示。
[0051]
③
第三个特征指标为边频能量率ser,其计算公式如公式(3)所示。
[0052]
④
第四个特征指标为边频能量率占比sum_side_ratio,其计算公式如公式(4)所示。
[0053]
⑤
第五个特征指标为加速度峭度acc_kurtosis,其计算公式如公式(5)所示。
[0054]
步骤四:齿轮箱齿轮故障自动识别。
[0055]
根据齿轮箱信号中提取的特征指标,根据特征值与其阈值关系形成如下故障判断条件(其中各特征值阈值由积累案例数据的特征值统计得到,第一设定阈值threshold1取值为0.4,第二设定阈值threshold2取值为2.8,第三设定阈值threshold3取值为0.5,第四设定阈值threshold4取值为0.5),通过各条件最终的满足情况判断齿轮箱运行情况,可判断如下齿轮箱运行状态及故障类型:1)无齿轮故障:齿轮箱箱若无齿轮故障,则啮合频率及其谐频能量应处于正常水平,因此判断条件为:a)啮合频率能量占比gmf_energy_ratio小于或等于第一设定阈值threshold1;2)齿轮啮合故障:考虑到齿轮箱复合故障情况,齿轮啮合故障应分为以下三种情况:情况1:齿轮啮合频率及其谐频能量较高,但加速度无明显冲击,则表示无复合故障,单纯啮合不良导致(即齿轮啮合不良故障),其判断条件为:a)啮合频率能量占比gmf_energy_ratio大于第一设定阈值threshold1;b)加速度峭度acc_kurtosis小于或等于指定阈值第二设定阈值threshold2;情况2:齿轮啮合频率及其谐频能量较高,但加速度有冲击,调制频率为非齿轮轴转频成分,该情况为复合故障,由于到调制频率为非齿轮轴转频成分,可能为齿轮啮合不良和轴承损伤的复合情况(第一复合故障),其判断条件为:a)1至2倍啮合频率能量占比gmf_energy_ratio大于第一设定阈值threshold1;b)加速度峭度acc_kurtosis大于第二设定阈值threshold2;c)调制频率标识mod_flag==0;情况3:齿轮啮合频率及其谐频能量较高,但加速度有冲击,调制频率为齿轮轴转频成分,但啮合频率附近无明显齿轮轴转频的边频成分,该情况为复合故障,由于调制频率为齿轮轴转频成分,可能为齿轮局部故障或轴承松动导致,但啮合频率附近无明显齿轮轴转频的边频成分,因此排除齿轮局部故障导致,该情况可能为齿轮啮合不良和轴承松动的复合情况(第二复合故障),其判断条件为:a)1至2倍啮合频率能量占比gmf_energy_ratio大于第一设定阈值threshold1;b)加速度峭度acc_kurtosis大于第二设定阈值threshold2;c)调制频率标识mod_flag==1;d)边频能量率占比sum_side_ratio小于或等于第三设定阈值threshold3。
[0056]
3)齿轮局部磨蚀故障(磨损、点蚀):齿轮啮合频率及其谐频能量较高,加速度有冲击,调制频率为齿轮轴转频成分,啮合频率附近存在齿轮轴转频的边频成分,由于齿轮局部
故障的严重程度与啮合频率边频成分能量成正比,齿轮在出现局部故障时啮合频率能量仍为主导,边频能量相较于啮合频率能量较低,其判断条件为:a)1至2倍啮合频率能量占比gmf_energy_ratio大于第一设定阈值threshold1;b)加速度峭度acc_kurtosis大于第二设定阈值threshold2;c)调制频率标识mod_flag==1;d)边频能量率占比sum_side_ratio大于第三设定阈值threshold3;e)边频能量率ser小于或等于第三设定阈值threshold3。
[0057]
4)齿轮局部断齿故障:齿轮啮合频率及其谐频能量较高,加速度有冲击,调制频率为齿轮轴转频成分,啮合频率附近存在齿轮轴转频的边频成分,由于齿轮局部故障的严重程度与啮合频率边频成分能量成正比,齿轮在出现局部断齿边频能量相较于啮合频率能量较高,其判断条件为a)1至2倍啮合频率能量占比gmf_energy_ratio大于第一设定阈值threshold1;b)加速度峭度acc_kurtosis大于第二设定阈值threshold2;c)调制频率标识mod_flag==1;d)边频能量率占比sum_side_ratio大于第三设定阈值threshold3;e)边频能量率ser大于第三设定阈值threshold3。
[0058]
上述齿轮箱齿轮故障自动诊断方法的具体实现方式的流程图如图2所示。首先在齿轮箱轴承位置安装振动加速度传感器,实时采集齿轮箱的振动加速度信号,对原始的振动加速度信号进行带通滤波和积分获得速度信号,对速度信号进行fft得到速度谱;同时对原始振动加速度信号进行滤波和hilbert变换后得到包络信号,并对包络信号进行fft得到包络谱;其次获取该齿轮轴的转频rotate_freq以及该齿轮轴上的齿轮齿数gtnum,并计算该齿轮轴上齿轮的啮合频率f
gmf
;再次,通过获取到的齿轮轴转频和齿轮啮合频率等信息,在采集到的加速度、速度、包络信号中提取齿轮箱故障识别指标,包括:速度1至2倍的啮合频率能量占比gmf_energy_ratio、加速度峭度acc_kurtosis、调制频率标识mod_flag、边频能量率占比sum_side_ratio、边频能量率ser;最后,结合齿轮故障机理和典型齿轮箱故障特征,根据齿轮箱故障识别指标与其阈值关系形成齿轮故障判断条件,达到齿轮箱故障自动诊断的目的,可识别故障包括:齿轮啮合故障、齿轮局部磨蚀故障(点蚀、磨损)和齿轮局部断齿故障。
[0059]
其中,1至2倍的啮合频率能量占比gmf_energy_ratio的计算方法如图3所示,具体为gmf_energy_ratio=(啮合频率能量)/(整个频带能量)。该指标表示1倍啮合频率和2倍啮合频率的能量与整个频带能量中的比,可反映啮合频率的能量水平。
[0060]
边频能量率占比sum_side_ratio的计算方法如图4所示,具体为sum_side_ratio=(f
gmf
及其边频能量+2x f
gmf
及其边频能量)/(整个频带能量)。该指标表示1倍啮合频率及其边频成分的能量和2倍啮合频率及其边频成分的能量之和与整个频带能量中的比,该指标反映齿轮箱啮合频率旁存在边频成分的水平。
[0061]
边频能量率ser的计算方法如图5所示,该指标表示1倍啮合频率f
gmf
边频能量与f
gmf
能量的比值gmf_1_ser和2倍啮合频率2x f
gmf
边频能量与2x f
gmf
能量的比值gmf_2_ser中最大的比值,该指标用于反映齿轮局部故障的严重程度。具体的,gmf_1_ser=(f
gmf
边频能量)/(f
gmf
能量);gmf_2_ser=(2x f
gmf
边频能量)/(2x f
gmf
能量);ser=max(gmf_1_ser,gmf_2_ser)。
[0062]
齿轮啮合故障表现为齿轮啮合频率及其谐频能量较高,如图6a所示;齿轮局部磨
蚀故障(磨损、点蚀)表现为齿轮啮合频率及其谐频能量较高,啮合频率附近存在齿轮轴转频的边频成分,如图6b所示;齿轮局部断齿故障表现为齿轮啮合频率及其谐频能量较高,啮合频率附近存在齿轮轴转频的边频成分,边频能量相较于啮合频率能量较高且边频数量较多,如图6c所示。
[0063]
部分齿轮故障频谱、故障识别指标及故障识别情况的对比结果如表1所示。表1中波形1、波形2、波形3和波形4的频谱图分别如图7a、图7b、图7c和图7d所示。
[0064]
表1 对比结果
输入轴速度波形啮合频率能量占比加速度峭度调制频率标识边频能量率占比边频能量率故障类型波形10.2351.58610.2570.564无齿轮故障波形20.4582.93410.5660.314齿轮局部磨蚀故障波形30.4134.11510.8120.589齿轮局部断齿故障波形40.7181.22300.7380.223齿轮啮合故障
从表1的对比情况可以看到本实施例提出的齿轮箱故障识别方法可以有效的识别齿轮箱常见故障类型,并达到较好效果。
[0065]
本发明还提供了一种齿轮箱齿轮故障自动诊断系统,参见图8,所述系统包括:数据获取模块201,用于获取目标齿轮箱中齿轮轴的振动加速度信号和齿轮轴上齿轮的啮合频率。
[0066]
速度谱包络谱确定模块202,用于由所述振动加速度信号确定齿轮轴的速度谱和包络谱。
[0067]
第一指标确定模块203,用于根据所述啮合频率和所述包络谱中能量最大的频率成分确定调制频率标识。
[0068]
第二指标确定模块204,用于根据所述速度谱、所述啮合频率和所述包络谱中能量最大的频率成分计算啮合频率能量占比、边频能量率和边频能量率占比。
[0069]
第三指标确定模块205,用于根据所述振动加速度信号计算加速度峭度。
[0070]
故障诊断模块206,用于根据所述调制频率标识、所述啮合频率能量占比、所述边频能量率、所述边频能量率占比和所述加速度峭度对所述目标齿轮箱进行故障诊断,得到诊断结果;所述诊断结果包括无齿轮故障、齿轮啮合故障、齿轮局部磨蚀故障和齿轮局部断齿故障。
[0071]
在一个示例中,所述数据获取模块201,具体包括:振动数据采集单元,用于采用振动加速度传感器采集齿轮轴的振动加速度信号;所述振动加速度传感器安装在目标齿轮箱中齿轮轴轴承位置。
[0072]
静态参数获取单元,用于获取齿轮轴的转频和齿轮轴上的齿轮齿数。
[0073]
啮合频率计算单元,用于由所述齿轮轴的转频和所述齿轮齿数计算相应齿轮轴上齿轮的啮合频率。
[0074]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0075]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据
本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1