深度精准率自动检测系统的制作方法
1.本发明涉及农用机械检测系统技术领域,具体为深度精准率自动检测系统。
背景技术:
2.在对智能检测终端和角度传感器进行深度精确率进行测试时,都是由人工进行传感器的偏转,测量偏转角度,手动计算出深度,再将该值与终端上显示的深度进行对比,计算出精准率。
3.然而,现有的农业机械用测量传感器在检测的过程中存在以下的问题: (1)在测量传感器偏转角度值时,易受人为因素影响,疲劳、走神、不仔细等,都会造成检测失误。并且人工测量速度慢,在需要大量测试数据时,就需要耗费更多的时间、人力和物力;(2)同时人工测量还会存在不稳定性,对于同一角度的测量和计算,可能会出现不同的结果。为此,需要设计相应的技术方案解决存在的技术问题。
技术实现要素:
4.本发明的目的在于提供深度精准率自动检测系统,解决了在测量传感器偏转角度值时,易受人为因素影响,疲劳、走神、不仔细等,都会造成检测失误。并且人工测量速度慢,在需要大量测试数据时,就需要耗费更多的时间、人力和物力,这一技术问题。
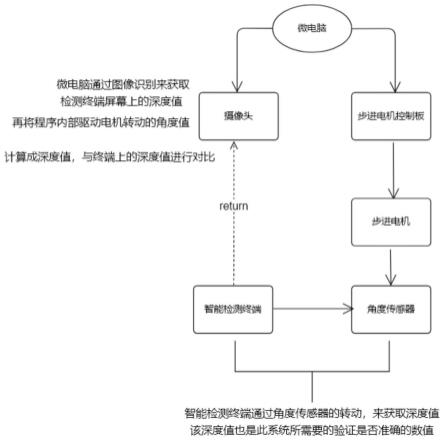
5.为实现上述目的,本发明提供如下技术方案:深度精准率自动检测系统,包括自动化检测系统,所述自动化检测系统包括摄像头、步进电机、电机驱动板和微电脑,所述步进电机的转子上安装有待检测角度传感器,所述电机驱动板安装于不仅电机上且通过线路与微电脑相连接,所述待检测角度传感器通过线路连接有智能检测终端,所述智能检测终端的屏幕正对摄像头,所述摄像头通过线路与微电脑相连接,所述微电脑通过图像识别来获取智能检测终端屏幕上的深度值,再讲程序内部驱动电机转动的角度值计算成深度值并与智能检测终端的深度值进行对比。
6.作为本发明的一种优选方式,所述微电脑选择树莓派,所述树莓派配备有5v输出口的gpio接口且设置有gpio、19、gpio 16、gpio 20和gpio 21。
7.作为本发明的一种优选方式,所述步进电机的控制板选择uln2003模块,所述树莓派的pin2和pin6分别接到步进电机的控制板的+5v和-5v接口。
8.作为本发明的一种优选方式,所述步进电机则选择dc 5v4相28ybj-48 步进电机并采用5v电压驱动。
9.作为本发明的一种优选方式,所述步进电机驱动板上设置有in1、in2、 in3和in4四个接口,所述in1、in2、in3和in4四个接口分别与gpio 19、 gpio 16、gpio 20和gpio 21相连接。
10.与现有技术相比,本发明的有益效果如下:
11.1.本发明设计了一种专门用于对农业机械的测量传感器进行检测的系统,使用微电脑控制步进电机代替人工,对角度传感器进行特定角度的偏转,再使用摄像头结合图像
识别,获取智能检测终端上反馈出来的深度值所设计的一种深度精准率自动检测系统,可实现对农业机械用测量传感器精确化检测处理,根据精准农业的理念,采用微电脑控制来实现快速且精准的测量,其主要组成部分有:摄像头、步进电机、步进电机驱动板、微电脑四大部分组成,
12.其工作原理为:角度传感器安装在步进电机转子上,微电脑通过驱动板来控制步进电机进行正反转,再通过摄像头来获取智能检测终端的反馈当前的深度值,与电机转动角度所计算的深度值进行对比。
13.2.本发明通过微电脑内部程序的编写,可以使电机在短时间内转动多个特定的角度,收集多组测试数据,同时因为步进电机高精度的特性,免去了人工测量电机上角度传感器转动的角度,微电脑可以直接使用程序内部所设定的角度值来进行计算深度,使测量更精准、效果更好,同时可以减少人工测量所产生的误差。
附图说明
14.图1为本发明的整体系统图;
15.图2为本发明所述微电脑的引脚图;
16.图3为本发明所述微电脑与电机驱动板连接结构图。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.请参阅图1-3,本发明提供一种技术方案:深度精准率自动检测系统,包括自动化检测系统,自动化检测系统包括摄像头、步进电机、电机驱动板和微电脑,步进电机的转子上安装有待检测角度传感器,电机驱动板安装于不仅电机上且通过线路与微电脑相连接,待检测角度传感器通过线路连接有智能检测终端,智能检测终端的屏幕正对摄像头,摄像头通过线路与微电脑相连接,微电脑通过图像识别来获取智能检测终端屏幕上的深度值,再讲程序内部驱动电机转动的角度值计算成深度值并与智能检测终端的深度值进行对比,设计了一种专门用于对农业机械的测量传感器进行检测的系统,使用微电脑控制步进电机代替人工,对角度传感器进行特定角度的偏转,再使用摄像头结合图像识别,获取智能检测终端上反馈出来的深度值所设计的一种深度精准率自动检测系统,可实现对农业机械用测量传感器精确化检测处理,根据精准农业的理念,采用微电脑控制来实现快速且精准的测量,其主要组成部分有:摄像头、步进电机、步进电机驱动板、微电脑四大部分组成,其工作原理为:角度传感器安装在步进电机转子上,微电脑通过驱动板来控制步进电机进行正反转,再通过摄像头来获取智能检测终端的反馈当前的深度值,与电机转动角度所计算的深度值进行对比。
19.进一步改进地,如图2所示:微电脑选择树莓派,树莓派配备有5v输出口的gpio接口且设置有gpio、19、gpio 16、gpio 20和gpio 21。
20.进一步改进地,如图2所示:步进电机的控制板选择uln2003模块,树莓派的pin2和
pin6分别接到步进电机的控制板的+5v和-5v接口。
21.进一步改进地,如图2所示:步进电机则选择dc 5v4相28ybj-48步进电机并采用5v电压驱动。
22.进一步改进地,如图3所示:步进电机驱动板上设置有in1、in2、in3 和in4四个接口,in1、in2、in3和in4四个接口分别与gpio 19、gpio 16、 gpio 20和gpio 21相连接。
23.在使用时:本发明通过微电脑内部程序的编写,可以使电机在短时间内转动多个特定的角度,收集多组测试数据,
24.同时因为步进电机高精度的特性,免去了人工测量电机上角度传感器转动的角度,微电脑可以直接使用程序内部所设定的角度值来进行计算深度,使测量更精准、效果更好,同时可以减少人工测量所产生的误差,
25.示例代码如下:
26.import rpi.gpio.gpio
27.import time
28.in1=40#pin 40
29.in2=38
30.in3=36
31.in4=35
32.def setstep(a1,a2,a3,a4):
33.gpio.output(in1,a1)
34.gpio.output(in2,a2)
35.gpio.output(in3,a3)
36.gpio.output(in4,a4)
37.def setup():
38.gpio.setwranings(false)
39.gpio.setmode(gpio.board)
40.gpio.setup(in1,gpio.out)#设置pin为输出
41.gpio.setup(in2,gpio.out)
42.gpio.setup(in3,gpio.out)
43.gpio.setup(in4,gpio.out)
44.def main():
45.setstep(1,0,0,0)#开始前进一圈
46.time.sleep(0.1)
47.setstep(0,1,0,0)
48.time.sleep(0.1)
49.setstep(0,0,1,0)
50.time.sleep(0.1)
51.setstep(0,0,0,1)
52.time.sleep(0.1)
53.setstep(0,0,0,0)#恢复
54.time.sleep(0.1)
55.if__name__==
‘
__main__’:
56.setup()#初始化引脚
57.main()
58.gpio.cleanup()#释放
59.运行此程序,可以使电机正转一周,后续可以按照需要,调整 in1,in2,in3,in4的电平,便可使电机转动到特定角度,具体转动计算方法:我们结合dc 5v4相28byj-48步进电机的两个参数,减速比1/64、步距角 5.625
°
/64,就可以计算出软件上应该给几个四拍或者八拍的脉冲。以八拍为为例,假设要使点击顺时针转动45
°
,则根据公式45
°
=(5.625
°
/64)
ꢀ×8×
x,计算出x=64,因此在程序中设定64个八拍的脉冲,便可以使电机顺时针转动45
°
。
60.在电机控制传感器转动后,与传感器相连的检测终端便在屏幕上反馈出深度值,此时树莓派再通过摄像头将检测终端屏幕拍下,通过图像识别获取到终端计算的深度值,再与树莓派程序计算电机转动角度所得出的深度理论值进行对比,如若精准率误差在范围内,则可以控制树莓派上某个led灯亮起。
61.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1