一种毫米波雷达电力线探测与三维重建方法与流程
1.本发明涉及信息感知与识别技术领域全域态势感知在毫米波雷达探测电力线应用中的一种探测识别与雷达数据的三维重建方法,适用于直升机防撞、无人机防撞系统的应用。
背景技术:
2.目前,电力线、铁塔、高大建筑、山岳、丛林等对直升机飞行安全造成很大威胁,直升机防撞技术需求越来越迫切,光学设备、激光雷达等由于价格低廉应用较广,但其存在环境适应性差、受天候影响大,烟、雾、霾、雨、雪等气象条件下发现概率下降,影响正常探测;此外针对电力线等目标,存在发现困难的问题。毫米波雷达对电力线探测具有明显优势,不受天候气象影响;但对电力线的自动检测与三维显示还存在一定难度,自动化、可视化程度较低,造成驾驶员使用体验受限。
技术实现要素:
3.本发明为了解决背景技术中的问题提出了一种毫米波雷达电力线探测与三维重建方法,它涉及毫米波雷达探测、雷达数据的波束锐化处理、点面目标检测提取、电力线特征检测,霍夫变换及合理性检验,坐标转换与数据对齐、三维重建与三维渲染等。
4.本发明采用的技术方案为:
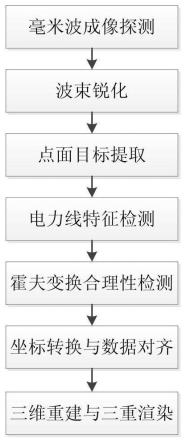
5.一种毫米波雷达电力线探测与三维重建方法,包括以下步骤:
6.(1)采用毫米波雷达发射线性调频调制波形电磁波,毫米波雷达接收后进行脉压解调,获得一维距离能量像数据,并通过雷达波束方位和俯仰扫描,合成雷达实孔径成像的方位-俯仰-距离-能量三维雷达图像数据;
7.(2)针对三维雷达图像数据,利用基于雷达天线方向图的卷积反演算法进行波束锐化处理,获得高分辨雷达图像数据;
8.(3)设置门限,从高分辨雷达图像数据中提取强散射点障碍物目标和大面积反射区域目标;
9.(4)在强散射点障碍物目标中,根据毫米波电力线上bragg散射分布特征,进行电力线特征目标的选取;
10.(5)对符合电力线特征的强散射点障碍物目标图像进行霍夫变换,得到呈直线段分布的多个目标集合,包括电力线和灯塔,针对多个目标集合,结合目标俯仰信息、距离信息、角度信息、能量信息和直线段散射点数量信息,进行符合电力线特征直线段的合理性判决,提取电力线目标;
11.(6)针对高分辨雷达图像数据、强散射点障碍物目标、大面积反射区域目标和电力线目标进行雷达坐标-直升机大地坐标-地心直角坐标转换,得到地心坐标系雷达三维数据;并采用聚合和内插算法得到地心坐标系下雷达距离-方位-高度的雷达栅格数据;
12.(7)针对雷达栅格数据,进行基于特征点生长的三维重建,得到三维场景数据模
型;并叠加障碍物目标信息、大面积目标信息和电力线信息进行三维渲染,实现特征目标的三维显示。
13.其中,所述的步骤(2)具体包括以下步骤:
14.(201)利用截断奇异值分解技术对三维雷达图像数据进行预处理;截断奇异值方法的结果可表示为:
15.h-y=h-hx+h-n
16.式中,h表示天线方向图,y表示天线回波,x表示目标散射系数的原始分布,n表示噪声,h-表示天线方向图h的逆矩阵;
17.(202)利用广义交叉验证函数gcv进行截断参数的选择,通过gcv函数的最小值点确定k,其描述的问题为:
[0018][0019]
式中,xk为截断参数为k时的解,i为单位矩阵,trace(
·
)表示矩阵的迹,为矩阵对角线的和,hk表示在gcv函数的最小值点k处的天线方向图,表示hk的逆矩阵;
[0020]
(203)重构截断参数为k时的信号模型,重新计算天线回波得到重构模型为:
[0021][0022]
其中,
[0023]
(204)针对强点目标,根据重新计算的天线回波利用正则化理论,添加目标先验信息,构建以l1范数为约束的目标函数;
[0024]
(205)以l1范数为正则项约束,以误差能量最小为保真项约束,优化目标函数,将相关的逆问题转化为如下的最优化问题:
[0025][0026]
其中,表示使得等式右侧取最小值时的x最小值,argmin
x
表示使目标函数取最小值的变量x的值,λ为一个常数变量;
[0027]
(206)最终利用迭代加权最小二乘方法完成对目标函数求解;得到最优解为:
[0028][0029]
式中,表示h的转置,w表示权重因子,w=diag|f(x)|,diag表示对角矩阵,其中,
[0030][0031]
其中ξ
→
0,为一个趋于0的数。
[0032]
其中,所述的步骤(5)具体包括以下步骤:
[0033]
(501)对对符合电力线特征的强散射点障碍物目标图像进行坐标转换,将每个方位的斜距变为垂直距离,处理后线性目标在图像中表现为直线段;
[0034]
(502)将步骤(503)处理后的图像按距离方向分块取阈值,对不同的距离块设置不同的阈值,每个距离块中大于阈值的则为目标;
[0035]
(503)对步骤(502)筛选后每个距离块的目标,利用hough变换将单个点以及位于
一条直线上的所有点凝聚成一个点,公式为:
[0036]
ρ=x cosθ+y sinθ
[0037]
其中,(x,y)表示直角坐标系中一个点的横纵坐标,θ表示点(x,y)与坐标系原点之间的角度,ρ表示凝聚成的点与坐标原点之间的距离;在参数空间内,一个点映射为一条余弦曲线,一段直线映射为经过同一点的一簇余弦曲线;
[0038]
(504)通过检测参数空间的极大值,并将参数空间反映射回直角坐标系,得到直角坐标系下每个距离块内最长的直线;
[0039]
(505)从步骤(504)得到的直线中根据以下原则选出电力线:
[0040]
1)直线上点的最大间距:取最大间隔d
max
,若直线上相邻点的间距出现大于d
max
的情形,则判断该直线不是电力线;
[0041]
2)电力线上所能看到的bragg散射峰的个数:若出现bragg散射峰则说明是电力线,没有bragg散射峰则不是电力线;
[0042]
3)直线上的最小间距:利用直线上是否存在bragg散射峰以及bragg散射峰的位置制定最小间距判据,若直线上相邻点的间距出现小于最小间距的情况,则不是电力线;
[0043]
同时满足上述3中情况,则选出电力线。
[0044]
其中,电力线上所能看到的bragg散射峰的个数具体判断过程如下:
[0045]
利用bragg散射峰的位置在直线上寻找对应点,即电力线回波的三个bragg峰的位置为-14
°
,0
°
,14
°
;利用bragg副峰与主峰的能量差异进一步判定,即副峰比主峰低7db;在平原地形下,电力线与雷达的距离与电力线长度的关系为:
[0046]
雷达能够探测到电力线的最远距离为r
max
≈2l,l表示电力线的长度,且三个bragg位于同一俯仰角:
[0047]
当时,电力线出现三个bragg散射峰,其中r表示电力线与雷达之间的距离;
[0048]
当θ在时,出现三个bragg散射峰,其中θ表示电力线与雷达的俯仰角;
[0049]
当θ在时,出现两个bragg散射峰;
[0050]
当θ在出现一个bragg散射峰;
[0051]
当θ大于时,没有bragg散射峰。
[0052]
本发明相比背景技术的优点在于:
[0053]
本发明采用毫米波实孔径成像技术抗干扰强、环境适应性好;
[0054]
本发明通过特征点增强与电力线检测算法能够自动识别电力线等障碍物目标;
[0055]
本发明采用雷达数据三维重建,可增强目标可视化程度。
附图说明
[0056]
图1为本发明的流程图。
[0057]
图2为本发明波束锐化算法流程图。
具体实施方式
[0058]
下面结合附图和具体实施例对本发明作进一步的解释说明。
[0059]
一种毫米波雷达电力线探测与三维重建方法,包括以下步骤:
[0060]
(1)采用毫米波雷达发射线性调频调制波形电磁波,雷达接收后进行脉压解调,获得一维距离能量像数据;通过雷达波束方位、俯仰扫描,合成实现雷达实孔径成像的方位-俯仰-距离-能量三维雷达图像数据。雷达针对三维数据进行姿态修正、运动补偿等经典算法,消除机载运动条件的影响,连续进行三维成像;并根据平台运动轨迹实现三维图像数据的叠加与更新。
[0061]
(2)针对三维雷达图像数据,利用基于雷达天线方向图的卷积反演算法进行波束锐化处理,获得高分辨雷达图像数据;
[0062]
信号从输入到输出的模型写成卷积形式
[0063]
y(t)=x(t)*a(t)+n(t)
[0064]
经傅里叶变换写在频域的表达式为
[0065]
y(ω)=x(ω)a(ω)+n(ω)
[0066]
写成反卷积求解形式为
[0067][0068]
若[h-m
,...,h0,...,hm]表示为对天线方向图的采样,则卷积矩阵可以表示为:
[0069][0070]
其中,考虑天线波束扫入和扫出时,会受到场景外半个波束的影响,构造卷积矩阵时使列数比场景点数多出一个天线波束的点数。
[0071]
在回波矩阵与天线测量矩阵已知的情况下,将提高方位向分辨率的问题转化为相应的求逆过程,理论上利用h逆就可实现目标恢复,实现方位向分辨率的提高。其提高分辨率方法如图2所示。
[0072]
雷达方位向回波数据为天线方向图与目标散射系数卷积的形式,卷积反演过程就是实现目标重构卷积模型的过程。
[0073]
(201)利用截尾奇异值分解(tsvd)技术对对三维雷达图像数据进行预处理,抑制在反演过程中的噪声放大,降低噪声对目标信息的干扰;截断奇异值方法的结果可表示为:
[0074]
h-y=h-hx+h-n
[0075]
式中,h表示天线方向图,y表示天线回波,x表示目标散射系数的原始分布,n表示噪声,h-表示天线方向图h的逆矩阵;
[0076]
(202)利用广义交叉验证(gcv)函数进行截断参数的选择,通过gcv函数的最小值点确定k,其描述的问题为:
[0077][0078]
式中xk为截断参数为k时的解,i为单位矩阵,trace(
·
)表示矩阵的迹,为矩阵对角线的和,hk表示在gcv函数的最小值点k处的天线方向图,h
k-表示hk的逆矩阵;
[0079]
(203)重构截断参数为k时的信号模型,重新计算天线回波得到重构模型为:
[0080][0081]
其中,
[0082]
(204)针对强点目标,根据重新计算的天线回波利用正则化理论,添加目标先验信息,构建以l1范数为约束的目标函数;
[0083]
(205)以l1范数为正则项约束,以误差能量最小为保真项约束,优化目标函数,将相关的逆问题转化为如下的最优化问题:
[0084][0085]
其中,表示使得等式右侧取最小值时的x最小值,argmin
x
表示使目标函数取最小值的变量x的值,λ为一个常数变量;
[0086]
(206)最终利用迭代加权最小二乘方法完成对目标函数求解;故,得到最优解为:
[0087][0088]
式中,表示的转置,w表示权重因子,w=diag|f(x)|,diag表示对角矩阵,其中,
[0089][0090]
其中ξ
→
0,为一个趋于0的数。
[0091]
(207)由于权重因子与目标散射系数本身相关,每得到一次计算结果都需更新权重因子,并需要对初始值进行定义。通过“先去后添”的策略实现低信噪比环境下前视超分辨成像。
[0092]
(3)设置门限,从高分辨雷达图像数据中提取强散射点障碍物目标和大面积反射区域目标;
[0093]
(4)在强散射点障碍物目标中,根据毫米波电力线上bragg散射分布特征,进行电力线特征目标的选取;
[0094]
(5)对符合电力线特征的强散射点障碍物目标图像进行霍夫变换,得到呈直线段分布的多个目标集合,包括电力线和灯塔,针对多个目标集合,结合目标俯仰信息、距离信息、角度信息、能量信息和直线段散射点数量信息,进行符合电力线特征直线段的合理性判决,提取电力线目标;
[0095]
电力线的雷达图像经过坐标变换和预处理后,在图像中表现为一条条的直线段,这些直线段包含在图像的片段内部,这时就可以直接采用霍夫变换来检测这些直线段。霍夫变换检测直线要求像素点在一条直线上,而对线宽和线上点的密度并无要求,经过适当的预处理后可以很容易地检测出电力线,但是同时也会检测出那些超过阈值的噪声点组成
的直线段。那么就必须对所检测出的直线段进行分类,确定出哪些是电力线,并把这些线段拾取出来。为了不丢失电力线信息,应该检测尽可能多的直线段,但这么做将导致计算量急剧攀升,不利于后续分类处理。考虑到检测的点是图像局部范围内的峰值点,在检测过程中只取这些峰值点即可,经过多次仿真实验确定取每片图像内2%一5%的峰值点,以兼顾检测概率和计算量。
[0096]
具体包括以下步骤:
[0097]
(501)对对符合电力线特征的强散射点障碍物目标图像进行坐标转换,将每个方位的斜距变为垂直距离,处理后线性目标在图像中表现为直线段;
[0098]
(502)将步骤(503)处理后的图像按距离方向分块取阈值,对不同的距离块设置不同的阈值,每个距离块中大于阈值的则为目标;
[0099]
(503)对步骤(502)筛选后每个距离块的目标,利用hough变换将单个点以及位于一条直线上的所有点凝聚成一个点,公式为:
[0100]
ρ=x cosθ+y sinθ
[0101]
其中,(x,y)表示直角坐标系中一个点的横纵坐标,θ表示点(x,y)与坐标系原点之间的角度,ρ表示凝聚成的点与坐标原点之间的距离;在参数空间内,一个点映射为一条余弦曲线,一段直线映射为经过同一点的一簇余弦曲线;
[0102]
(504)通过检测参数空间的极大值,并将参数空间反映射回直角坐标系,得到直角坐标系下每个距离块内最长的直线;
[0103]
(505)从步骤(504)得到的直线中根据以下原则选出电力线:
[0104]
1)直线上点的最大间距:取最大间隔d
max
,若直线上相邻点的间距出现大于d
max
的情形,则判断该直线不是电力线;
[0105]
2)电力线上所能看到的bragg散射峰的个数:
[0106]
利用bragg散射峰的位置在直线上寻找对应点,即电力线回波的三个bragg峰的位置为-14
°
,0
°
,14
°
;利用bragg副峰与主峰的能量差异进一步判定,即副峰比主峰低7db;在平原地形下,电力线与雷达的距离与电力线长度的关系为:
[0107]
雷达能够探测到电力线的最远距离为r
max
≈2l,l表示电力线的长度,且三个bragg位于同一俯仰角:
[0108]
当时,电力线出现三个bragg散射峰,其中r表示电力线与雷达之间的距离;
[0109]
当θ在时,出现三个bragg散射峰,其中θ表示电力线与雷达的俯仰角;
[0110]
当θ在时,出现两个bragg散射峰;
[0111]
当θ在出现一个bragg散射峰;
[0112]
当θ大于时,没有bragg散射峰;
[0113]
若出现bragg散射峰则说明是电力线,没有bragg散射峰则不是电力线;
[0114]
3)直线上的最小间距:利用直线上是否存在bragg散射峰以及bragg散射峰的位置制定最小间距判据,若直线上相邻点的间距出现小于最小间距的情况,则不是电力线;
[0115]
同时满足上述3中情况,则选出电力线。
[0116]
(6)针对高分辨雷达图像数据、强散射点障碍物目标、大面积反射区域目标和电力线目标进行雷达坐标-直升机大地坐标-地心直角坐标转换,得到地心坐标系雷达三维数据;坐标转换过程包括雷达极坐标系的三维扫描数据-》建立雷达局部直角坐标系-》笛卡尔积空间直角坐标-》旋转平移-》wgs84大地坐标-》cesium三维渲染,输出地心坐标系雷达三维数据;并采用聚合、内插算法实现地心坐标系下雷达距离-方位-高度的雷达栅格数据。
[0117]
(7)针对雷达栅格数据,进行基于特征点生长的三维重建,得到三维场景数据模型;叠加障碍物目标信息、大面积目标信息和电力线信息进行三维渲染,实现特征目标的三维显示。cesium三维渲染是面向三维地球和地图的javascript开源产品。支持各种几何体:点、线、面、立方球、椭球体、圆柱走廊(corridors)、管径、墙体。支持鼠标和触摸操作的缩放、渲染、惯性平移、飞行、任意视角、地形碰撞检测。
[0118]
完成以上步骤,即完成电力线探测与三维重建显示模型化实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1