一种挂载组件及标定支架的制作方法
1.本发明涉及车辆校准技术领域,特别是涉及一种挂载组件及标定支架。
背景技术:
2.先进驾驶辅助系统(advanced driver assistant system),简称adas,是利用安装于车上的各式各样的传感器,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以引起注意和提高安全性的主动安全技术。adas采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。在车辆使用过程中,震动、碰撞、环境温湿度等均会使上述传感器的物理安装状态发生改变,故需要不定期进行校准或标定。
3.对上述传感器进行校准或标定时,通常会在标定支架上挂载标定元件,以对车辆上的传感器进行校准或标定。标定支架配置有多个微调机构,各微调机构用于调整标定元件的角度或者位置,各微调机构都设置有一个对应的操纵杆或者旋钮,在操纵多个微调机构时需要操纵相应的多个操纵杆或者旋钮,操作过程较为繁琐。
技术实现要素:
4.本发明实施例旨在提供一种挂载组件及标定支架,以解决现有技术中在操纵多个微调机构时需要操纵相应的多个操纵杆或者旋钮导致操作过程较为繁琐的技术问题。
5.本发明实施例解决其技术问题采用以下技术方案:提供一种挂载组件,包括活动支架、第一微调机构、第二微调机构、操纵手柄及固定支架组件;所述活动支架、所述第一微调机构、所述第二微调机构及所述固定支架组件依次相连,所述操纵手柄活动连接所述第二微调机构,所述操纵手柄可沿其自身轴线在第一位置及第二位置之间移动,其中,在移动至所述第一位置时,所述操纵手柄与所述第一微调机构相关联,在移动至所述第二位置时,所述操纵手柄与所述第二微调机构相关联;所述活动支架用于挂载标定元件。
6.在一些实施例中,所述操纵手柄在与所述第一微调机构相关联时可绕其自身轴线转动,以使得所述第一微调机构带动所述活动支架绕第一轴线转动,所述第一轴线平行于所述操纵手柄的轴线。
7.在一些实施例中,所述第一微调机构包括第一安装支架、组合滑块及连杆;所述第一安装支架转动连接所述活动支架,所述活动支架关于所述第一安装支架的轴线与所述第一轴线相重合;所述组合滑块滑动连接所述第一安装支架;所述连杆的一端转动连接所述组合滑块,所述连杆关于所述组合滑块的轴线平行于所述第一轴线,所述连杆的另一端转动连接所述活动支架,所述连杆关于所述活动支架的轴线平行于所述第一轴线;所述操纵手柄在与所述第一微调机构相关联,并且在绕其自身轴线转动时,所述组合滑块沿垂直于所述第一轴线的方向移动。
8.在一些实施例中,所述第一微调机构还包括第一丝杆;所述第一丝杆转动连接所
述第一安装支架,所述第一丝杆的轴线平行于所述滑块的移动方向,所述组合滑块套设于所述第一丝杆,并与所述第一丝杆相螺接;所述操纵手柄在与所述第一微调机构相关联,并且在绕其自身轴线转动时,所述第一丝杆转动。
9.在一些实施例中,所述第一微调机构还包括第一锥齿轮,所述操纵手柄包括第二锥齿轮;所述第一锥齿轮同轴固定于所述第一丝杆;所述操纵手柄在与所述第一微调机构相关联时,所述第一锥齿轮与所述第二锥齿轮相啮合。
10.在一些实施例中,所述操纵手柄在与所述第二微调机构相关联时可绕其自身轴线转动,以使得所述第二微调机构带动所述活动支架绕第二轴线转动,所述第二轴线垂直于所述操纵手柄的轴线。
11.在一些实施例中,所述第二微调机构包括第二安装支架、第二滑块、锁紧件及第二丝杆;所述第二安装支架转动连接所述第一安装支架,所述第一安装支架关于所述第二安装支架的轴线与所述第二轴线相重合;所述锁紧件用于使所述第二滑块保持抵靠所述第二安装支架;所述第二丝杆转动连接所述第一微调机构,所述第二丝杆的轴线平行于所述操纵手柄的轴线;所述第二滑块套设于所述第二丝杆,并与所述第二丝杆相螺接;所述操纵手柄在与所述第一微调机构相关联,并且在绕其自身轴线转动时,所述第二丝杆转动。
12.在一些实施例中,所述锁紧件包括第一螺纹紧固件和第二螺纹紧固件;所述第二安装支架上开设有第一安装孔和第二安装孔;所述第二滑块上开设有腰孔,所述腰孔的长度方向平行于所述第二丝杆的轴线;所述第一螺纹紧固件穿设所述第一安装孔及所述腰孔的一端,所述第二螺纹紧固件穿设所述第二安装孔及所述腰孔的另一端;所述第一螺纹紧固件及所述第二螺纹紧固件共同将所述第二安装支架所述第二滑块压紧在一起。
13.在一些实施例中,所述第一螺纹紧固件及所述第二螺纹紧固件各包括螺栓和滑套;所述滑套套设于所述螺栓伸入所述腰孔内的部分。
14.在一些实施例中,所述第二微调机构还包括第一齿轮;所述操纵手柄包括第二齿轮;所述第一齿轮同轴固定于所述第二丝杆;所述操纵手柄在与所述第一微调机构相关联时,所述第二齿轮与所述第一齿轮相啮合。
15.在一些实施例中,所述第二微调机构包括第二安装支架、第一齿轮、万向节、第二丝杆及第二滑块;所述第二安装支架转动连接所述第一安装支架,所述第一安装支架关于所述第二安装支架的轴线与所述第二轴线相重合;所述第一齿轮转动连接所述第一安装支架,所述第一齿轮的轴线与所述操纵手柄的轴线相平行;所述第二丝杆通过所述万向节连接所述第一齿轮;所述第二滑块转动连接所述第二安装支架,所述第二滑块关于所述第二安装支架的轴线与所述第二轴线相平行;所述第二滑块套设于所述第二丝杆,并与所述第二丝杆相螺接;所述操纵手柄在与所述第一微调机构相关联,并且绕其自身轴线转动时,所述第一齿轮转动。
16.在一些实施例中,所述固定支架组件包括第三微调机构、第四微调机构及复合手柄;所述第二微调机构、所述第三微调机构及所述第四微调机构依次相连;所述复合手柄活动连接所述第二微调机构,可沿其自身轴线在第三位置及第四位置之间移动,其中,在移动至所述第三位置时,所述复合手柄与所述第三微调机构相关联,在移动至所述第四位置时,所述复合手柄与所述第四微调机构相关联。
17.在一些实施例中,所述复合手柄在与所述第三微调机构相关联时可绕其自身轴线
转动,以使得所述第三微调机构带动所述活动支架沿第三轴线移动,所述第三轴线垂直于所述复合手柄的轴线。
18.在一些实施例中,所述第三微调机构包括第三安装支架和齿条;所述复合手柄包括第四齿轮;所述齿条固定于所述第三安装支架,所述齿条的长度方向垂直于所述复合手柄的轴线;所述第三安装支架滑动连接所述第二安装支架,所述第三安装支架关于所述第二安装支架的移动方向与所述齿条的长度方向相平行;在所述复合手柄与所述第三微调机构相关联时,所述第四齿轮与所述齿条相啮合。
19.在一些实施例中,所述复合手柄在与所述第四微调机构相关联时可绕其自身轴线转动,以使得所述第四微调机构带动所述活动支架绕第四轴线转动,所述第四轴线垂直于所述复合手柄的轴线,并且垂直于所述第三轴线。
20.在一些实施例中,所述第四微调机构包括第四安装支架、第三齿轮、万向节、第三丝杆及第三滑块;第四安装支架转动连接所述第三安装支架,所述第三安装支架关于所述第四安装支架的轴线与所述第四轴线相重合;所述第三齿轮转动连接所述第二安装支架,所述第三齿轮的轴线与所述复合手柄的轴线相平行,所述第三丝杆通过所述万向节连接所述第三齿轮;所述第三滑块转动连接所述第四安装支架,所述第三滑块关于所述第四安装支架的轴线平行于所述第四轴线,所述第三滑块套设于所述第三丝杆,并与所述第三丝杆相螺接;所述复合手柄与所述第四微调机构相关联时,所述第四齿轮与所述第三齿轮相啮合。
21.在一些实施例中,所述第四微调机构包括第四安装支架、第三滑块、第三丝杆、第三齿轮及锁紧件;所述第四安装支架转动连接所述第三安装支架,所述第三安装支架关于所述第四安装支架的轴线与所述第四轴线相重合;所述锁紧件用于使所述第三滑块保持抵靠所述第四安装支架;所述第三丝杆转动连接所述第三安装支架,所述第三丝杆的轴线平行于所述复合手柄的轴线;所述第三齿轮同轴固定于所述第三丝杆;所述复合手柄与所述第四微调机构相关联时,所述第四齿轮与所述第三齿轮相啮合。
22.本发明实施例解决其技术问题还采用以下技术方案:提供一种标定支架,包括底座、立架、横梁及如上所述的挂载组件;所述立架的一端连接所述底座,所述横梁连接所述立架,所述挂载组件连接所述横梁。
23.与现有技术相比较,本发明实施例提供的挂载组件及标定支架中,在固定支架组件固定于标定支架的主体部分后,通过设置可在第一位置及第二位置之间移动的操纵手柄,操纵手柄移动至第一位置时与第一微调机构相关联,使得操纵手柄能够操纵第一微调机构,操纵手柄移动至第二位置时与第二微调机构相关联,使得操纵手柄能够操纵第二微调机构。由此,只需要一个手柄即可实现对两个微调机构进行操纵,操作过程较为简便。
附图说明
24.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
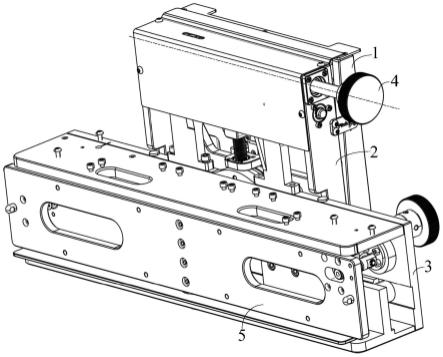
25.图1是本发明其中一实施例提供的挂载组件的结构示意图;
26.图2是图1所示的挂载组件在另一个角度的结构示意图;
27.图3是图1所示的挂载组件的拆解示意图,其中挂载组件的活动支架的后侧被示出;
28.图4是图1所示的挂载组件的拆解示意图,其中挂载组件的第一微调机构的后侧被示出;
29.图5是图1所示的挂载组件的活动支架及第一微调机构的结构示意图;
30.图6是图1所示的挂载组件的拆解示意图,其中挂载组件的第一微调机构的前侧被示出;
31.图7是图1所示的挂载组件的内部结构示意图,其中挂载组件的第一微调机构及活动支架的连接处被示出;
32.图8及图9是图1所示的挂载组件的内部结构示意图,其中挂载组件的操纵手柄与第一微调机构相关联;
33.图10是图1所示的挂载组件的拆解示意图,其中挂载组件的第二微调机构的前侧被示出;
34.图11是图1所示的挂载组件的活动支架、第一微调机构及第二微调机构的结构示意图;
35.图12是图1所示的挂载组件的内部结构示意图,其中挂载组件的第一微调机构及第二微调机构的连接处被示出;
36.图13及图14是图1所示的挂载组件的结构示意图,其中挂载组件的操纵手柄与第二微调机构相关联;
37.图15是图1所示的挂载组件的内部结构示意图,其中挂载组件的第二微调机构的后侧被示出;
38.图16是图15所示的a处的局部放大图;
39.图17及图18是图1所示的挂载组件的内部结构示意图,其中挂载组件的操纵手柄被示出;
40.图19是图1所示的挂载组件的拆解示意图,其中挂载组件的第二微调机构的后侧被示出;
41.图20是图1所示的挂载组件的拆解示意图,其中挂载组件的第三微调机构的前侧被示出;
42.图21是图1所示的挂载组件的内部结构示意图,其中挂载组件的第二微调机构及第三微调机构的连接处被示出;
43.图22及图23是图1所示的挂载组件的内部结构示意图,其中挂载组件的复合手柄与第三微调机构相关联;
44.图24是图1所示的挂载组件的内部结构示意图,其中挂载组件的第四微调机构的前侧被示出;
45.图25是图1所示的挂载组件的内部结构示意图,其中挂载组件的第四微调机构的后侧被示出;
46.图26是图1所示的挂载组件的结构示意图,其中挂载组件的第三微调机构及第四微调机构的连接处被示出;
47.图27至图30是图1所示的挂载组件的内部结构示意图,其中挂载组件的复合手柄
与第四微调机构相关联;
48.图31及图32是图1所示的挂载组件的固定支架组件的内部结构示意图,其中固定支架组件的复合手柄被示出。
具体实施方式
49.为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明。需要说明的是,当元件被表述“连接”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“上”、“下”、“左”、“右”、“上端”、“下端”、“顶部”以及“底部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、等仅用于描述目的,而不能理解为指示或暗示相对重要性。
50.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本发明。
51.请参阅图1和图2,本发明其中一实施例提供一种挂载组件,包括活动支架1、第一微调机构2、第二微调机构3、操纵手柄4及固定支架组件5。活动支架1、第一微调机构2、第二微调机构3及固定支架组件5依次相连,
52.操作手柄4活动连接第一微调机构2,可沿其自身轴线在第一位置及第二位置之间移动,其中,在移动至第一位置时,操纵手柄4与第一微调机构2相关联,以使得操纵手柄4能够操纵第一微调机构2,在移动至第二位置时,操纵手柄4与第二微调机构3相关联,以使得操纵手柄4能够操纵第二微调机构3。
53.在操纵手柄4与第一微调机构2相关联时,操纵手柄4可绕其自身轴线转动,以使得第一微调机构2带动活动支架1绕第一轴线o1相对于固定支架组件5转动,第一轴线o1平行于操纵手柄4的轴线。
54.在操纵手柄4与第二微调机构3相关联时,操纵手柄4可绕其自身轴线转动,以使得第二微调机构3带动活动支架1绕第二轴线o2相对于固定支架组件5转动,第二轴线o2垂直于操纵手柄4的轴线。
55.请参阅图3,活动支架1包括活动安装板10及设置于活动安装板10 上的第一合页部11、第一铰座12。
56.第一合页部11及第一铰座12皆设置于活动安装板10的靠近第一微调机构2的一侧上。第一合页部11靠近活动安装板10的下端,第一合页部11的轴线与第一轴线o1相重合。
57.第一铰座12靠近活动安装板10的上端,第一铰座12的轴线平行于第一轴线o1。第一合页部11及第一铰座12皆用于转动连接第一微调机构2。
58.活动安装板10的远离第一微调机构2的另一侧用于安装标定元件。标定元件可用于标定待测车辆的先进驾驶辅助系统(advanced driverassistance system,adas)的传感器。
59.请参阅图4至图6,第一微调机构2包括第一安装支架20、第一锥齿轮22、第一丝杆23、滑块组件24及连杆25。第一安装支架20转动连接活动支架1,活动支架1关于第一安装支
架20的轴线与第一轴线o1相重合。
60.第一锥齿轮22同轴固定于第一丝杆23,第一锥齿轮22用于与操纵手柄4啮合,以实现操纵手柄4与第一微调机构2关联。第一丝杆23转动连接第一安装支架20,第一丝杆23的轴线垂直于第一轴线o1,并且垂直于第二轴线o2。滑块组件24滑动连接第一安装支架20,滑块组件 24套设于第一丝杆23的外周,并与第一丝杆23相螺接。连杆25的一端转动连接滑块组件24,连杆25关于滑块组件24的轴线平行于第一轴线o1,连杆25的远离滑块组件24的另一端转动连接活动支架1,连杆 25关于第一铰座12的轴线与第一铰座12的轴线相重合。
61.第一安装支架20包括第一安装板200、第一安装臂201、第二安装臂202、支撑板203、第一滑轨204、第一丝杆安装板205、第二丝杆安装板206、手柄安装板207、第二合页部208及第一回转支承部209。第一安装板200设置于活动支架1及第二微调机构3之间。
62.第一安装臂201、第二安装臂202及支撑板203皆设置于第一安装板200的上侧,支撑板203设置于第一安装臂201及第二安装臂202之间。
63.第一丝杆安装板205及第二丝杆安装板206皆设置于支撑板203的远离活动支架1的一侧,第二丝杆安装板206设置于第一丝杆安装板 205的上侧。第一丝杆安装板205上开设有第一丝杆安装孔,第一丝杆 23的下端嵌入第一丝杆安装孔内。第二丝杆安装孔206上开设有第二丝杆安装孔,第一丝杆23的上端穿过第二丝杆安装孔,并延伸至第二丝杆安装板206的上侧。第一锥齿轮22套设于第一丝杆23的延伸至第二丝杆安装板206的上侧的部分。
64.第一导轨204固定于支撑板203,并设置于第一丝杆安装板205及第二丝杆安装板206之间,第一导轨204的长度方向与第一丝杆23的轴线相平行,滑块组件24滑动连接第一导轨204,以实现滑动连接第一安装支架20。
65.第一安装臂201上开设有贯穿其自身的第一手柄安装孔2010,第一手柄安装孔2010的轴线与操纵手柄4的轴线相重合,第一手柄安装孔 2010用于安装操纵手柄4。
66.手柄安装板207连接第二丝杆安装板206,并设置于第一锥齿轮22 与第一安装臂201之间,手柄安装板207上开设有贯穿其自身的第二手柄安装孔,第二手柄安装孔的轴线与操纵手柄4的轴线相重合,第二手柄安装孔用于安装操纵手柄4。
67.第二合页部208设置于第一安装板200的靠近活动支架1的一侧,第二合页部208的轴线与第一轴线o1相重合,第二合页部208用于转动连接活动支架1。
68.第一回转支承部209设置于第一安装板200的靠近第二微调机构3 的一侧。第一回转支承部209的轴线与第二轴线o2相重合。第一回转支承部209用于转动连接第二微调机构3。
69.滑块组件24包括第一滑块240和第一导向块241。第一滑块240套设于第一丝杆23上,连杆25的一端转动连接第一滑块240。第一导向块241滑动连接第一导轨204,并固定于第一滑块240。
70.请参阅图7至图9,第一合页部11转动连接第二合页部208,以实现活动支架1转动连接第一安装支架20。连杆25的远离滑块组件24的另一端转动连接第一铰座12,以实现连杆25的远离滑块组件24的另一端转动连接活动支架1。
71.在第一锥齿轮22与操纵手柄4相啮合,并且操纵手柄4绕其自身轴线转动时,操纵手柄4带动第一锥齿轮22绕其自身轴线转动,第一锥齿轮22带动第一丝杆23一并转动,第一
丝杆23带动滑块组件24沿第一丝杆23的轴线移动,滑块组件24通过连杆25推动或者拉动活动支架1,以使得整个活动支架1绕第一轴线o1转动。
72.其中,操纵手柄4在朝方向s1转动时,带动第一锥齿轮22朝方向v1转动,第一锥齿轮22带动第一丝杆23一并朝方向v1转动,第一丝杆23 带动滑块组件24向上移动,滑块组件24带动连杆25朝方向s1转动,以推动整个活动支架10朝方向s1转动,如图8所示;操纵手柄4在朝方向 s2转动时,带动第一锥齿轮22朝方向v2转动,第一锥齿轮22带动第一丝杆23一并朝方向v2转动,第一丝杆23带动滑块组件24向下移动,滑块组件24带动连杆25朝方向s2转动,以拉动整个活动支架10朝方向s2转动,如图9所示。
73.请参阅图10及图11,第二微调机构3包括第二安装支架30、第二滑块32、锁紧件33、第二丝杆34及第一齿轮35。第二安装支架30转动连接第一安装支架20,第一安装支架20关于第二安装支架30的轴线与第二轴线o2相重合。
74.锁紧件33连接第二滑块32及第二安装支架20,用于将第二滑块32 与第二安装支架30压紧在一起,以使得第二滑块32保持抵靠第二安装支架30。第二丝杆34转动连接第一安装支架20,第二丝杆34的轴线平行于操纵手柄4的轴线,第二滑块32套设于第二丝杆34,并与第二丝杆34相螺接。第一齿轮35同轴固定于第二丝杆34,第一齿轮35用于与操纵手柄4相啮合,以实现操纵手柄4与第二微调机构3相关联。
75.第二安装支架30包括第二安装板300、第一连接臂301、第二连接臂302、第二导轨303及第二回转支承部304。第二安装板300设置于第一安装板200及固定支架组件5之间,第二安装板300较长,第二安装板300的长度方向垂直于第一丝杆23的轴线。第二安装板300的中部正对第一安装板200,第二安装板300的两端分别超过第一安装板200 的两侧。
76.第二回转支承部304设置于第二安装板300的靠近第一安装板200 的一侧,第二回转支承部304固定于第二安装板300的中部。
77.第一连接臂301及第二连接臂302皆设置于第二安装板300的上侧,第一连接臂301设置于第一安装臂201与支撑板203之间。锁紧件 33连接第一连接臂301及第二滑块32,用于将第二滑块32与第一连接臂301压紧在一起,以使得第二滑块32保持抵接第一连接臂301。
78.第一安装臂201上开设有丝杆安装孔,第二丝杆34的一端嵌入丝杆安装孔内,以实现转动连接第一安装支架20,第二滑块32套设于第二丝杆34的远离第一安装臂201的另一端,第一齿轮35套设于第二丝杆34的中部。
79.第二连接臂302设置于第二安装臂202与支撑板203之间。
80.第二导轨303固定于第二安装板300的靠近固定支架组件5的一侧,第二导轨303的长度方向与第二安装板300的长度方向相平行,第二导轨303用于滑动连接固定支架组件5。
81.请参阅图12及图14,第二回转支承部304套设于第一回转支承部 209,以实现第二安装支架30转动连接第一安装支架20。
82.第一微调机构2还包括阻尼器27。阻尼器27与第二回转支承31设置于第一安装板200的同一侧,阻尼器27用于在活动支架1绕第二轴线o2转动时提供转动阻尼,以在活动支架1在绕第二轴线o2转动时具有阻尼感,便于精准调节活动支架1的角度。
83.阻尼器27包括压板270、阻尼弹性件271、弹性件安装块272及摩擦片。压板270转动连接第一安装板200,压板270关于第一安装板200 的轴线平行于第二轴线o2。摩擦片设置
于压板270的靠近第二回转支承部304的一侧,摩擦片用于抵靠第二回转支承部304的外圆周面。
84.弹性安装块272固定于第一安装板200,并设置于压板270的远离第二回转支承部304的一侧。阻尼弹性件271设置于弹性件安装块272 与压板270之间,用于提供将压板270压向第二回转支承部304的弹力。
85.在第一齿轮35与操纵手柄4相啮合,并且操纵手柄4绕其自身轴线转动时,操纵手柄4带动第一齿轮35绕其自身轴线转动,第一齿轮 35带动第二丝杆34一并其自身轴线转动,由于锁紧件33将第二滑块32 与第二安装支架30锁紧在一起,第二丝杆34沿其自身轴线移动,推动整个活动支架1及第一微调机构2,以使得活动支架1及第一微调机构 2绕第二轴线o2相对于第二安装支架30转动。
86.其中,操纵手柄4在朝方向s1转动时,带动第一齿轮35朝方向s2转动,第一齿轮35带动第二丝杆34一并朝方向s2转动,第二丝杆34朝远离第二滑块32的方向移动,以推动整个活动支架1及第一微调机构2 朝方向t1转动,如图13所示;操纵手柄4在朝方向s2转动时,带动第一齿轮35朝方向s1转动,第一齿轮35带动第二丝杆34一并朝方向s1转动,第二丝杆34朝靠近第二滑块32的方向移动,以推动整个活动支架 1及第一微调机构2朝方向t2转动,如图14所示。
87.请参阅图15和图16,第一连接臂301上开设有贯穿其自身的第一连接孔3010及第二连接孔3011,第二连接孔3011设置于第一连接孔 3010的上侧。
88.第二滑块32上开设有贯穿其自身的腰孔320。腰孔320的长度方向平行于第一丝杆23的轴线。腰孔320的下端靠近第一连接孔3010,腰孔320的上端靠近第二连接孔3011。
89.锁紧件33包括第一螺纹紧固件330和第二螺纹紧固件331。第一螺纹紧固件330穿设第一安装孔3010及腰孔320的下端,第二螺纹紧固件331穿设第二安装孔3011及腰孔320的上端。第一螺纹紧固件330及第二螺纹紧固件331共同将第二滑块32与第一连接臂301压紧在一起。在活动支架1及第一微调机构2绕第二轴线o2相对于第二安装支架30 转动时,第二滑块32及第二丝杆34也会一并转动,通过设置腰孔320,在第二滑块32相对于第二安装支架30转动时,第一螺纹紧固件330及第二螺纹紧固件331能够沿腰孔320的长度方向移动,使得第一连接臂 301能够在第二滑块32翘起的情况下保持抵靠第二滑块32。
90.第一螺纹紧固件330和第二螺纹紧固件331各包括螺栓3300和螺母3301。螺栓3300和螺母3301相螺接,将第一连接臂301和第二滑块 32压紧在一起。
91.可以理解,根据实际需要,螺母3301可以省略,此时,第一连接孔 3010和第二连接孔3011皆为螺孔,螺栓3300与螺孔相螺接,将第一连接臂301和滑块32压紧在一起。
92.螺栓3300的头部设置于第一连接臂301的远离第二滑块32的一侧,螺母3301设置于第二滑块32的远离第一连接臂301的一侧。
93.可以理解,根据实际需要,螺栓3300的头部的位置可以与螺母3301 的位置互换。
94.第一螺纹紧固件330和第二螺纹紧固件331可以各包括垫片3302。垫片3302设置于螺母3301与第二滑块32之间。
95.可以理解,根据实际需要,垫片3302也可以设置于螺栓3300的头部与第一连接臂301之间。
96.垫片3302可以为弹簧垫片。弹簧垫片可以提供预紧力,使得螺栓 3300与螺母3301
之间不容易相对转动,另外,弹簧垫片能够在第二滑块32翘起时压缩,在第二滑块32与第一连接臂301相贴合时复原,能够提供第二滑块32翘起的空间。
97.第一螺纹紧固件330和第二螺纹紧固件331可以各包括滑套3303。滑套3303套设于螺栓3300的伸入腰孔320内的部分,滑套3303的外表面较为光滑,与腰孔320的内壁的摩擦较小,利于第一螺纹紧固件330 及第二螺纹紧固件331沿腰孔320的长度方向移动。
98.请参阅图17和图18,操纵手柄4包括第一旋钮40、第一连接杆41、第二锥齿轮42及第二齿轮43。第一连接杆41的轴线与操纵手柄4的轴线相重合,第一连接杆41穿设第一手柄安装孔2010及第二手柄安装孔,以实现操纵手柄4活动连接第一安装支架20。
99.第一连接杆41的一端延伸至第一安装臂201的远离手柄安装板207 的一侧。第一旋钮40设置于第一安装臂201的远离手柄安装板207的一侧,并同轴固定于第一连接杆41的一端。第一连接杆41的远离第一旋钮40的另一端延伸至手柄安装板207的远离第一安装臂201的一侧。第二锥齿轮42设置于手柄安装207的远离第一安装臂201的一侧,并同轴固定于连接杆41的另一端。
100.第二齿轮43同轴固定于第一连接杆41的在第一安装臂201及手柄安装板207之间的部位上。第二锥齿轮42用于与第一锥齿轮22相啮合,以实现操纵手柄4与第一微调机构2相关联,第二齿轮43用于与第一齿轮35相啮合,以实现操纵手柄4与第二微调机构3相关联。
101.在操纵手柄4移动至第一位置时,第二锥齿轮42与第一锥齿轮22 啮合,第二齿轮43与第一齿轮35分离,以实现操纵手柄4与第一微调机构2相关联,如图17所示;在操纵手柄4移动至第二位置时,第二齿轮43与第一齿轮35啮合,第二锥齿轮42与第一锥齿轮22分离,以实现操纵手柄4与第二微调机构3相关联,如图18所示。
102.第一手柄安装孔2010的内壁上开设有第一卡槽2011和第二卡槽2012。第一卡槽2011靠近第二锥齿轮42,第二卡槽2012远离第二锥齿轮42。
103.操纵手柄4还包括第一卡部44。第一卡部44凸设于第一连接杆41 的收容于第一手柄安装孔2010内的部分的外周。
104.在操纵手柄4移动至第一位置时,第一卡部44与第一卡槽2011相卡接,如图17所示;在操纵手柄4移动至第二位置时,第一卡部44与第二卡槽2012相卡接,如图18所示。
105.第一卡槽2011、第二卡槽2012及第一卡部44皆呈环形结构,皆环绕第一连接杆41。
106.第一连接杆41的外周面上开设有第一环形安装槽,第一环形安装槽环绕第一连接杆41,第一卡部44套设于第一环形安装槽处。
107.通过设置第一卡槽2011、第二卡槽2012及第一卡部44,能够使得在操纵手柄4在移动至第一位置或者第二位置时具有卡顿感,能够提醒使用者操纵手柄4已经移动到第一位置或者第二位置。
108.请参阅图19和图20,固定支架组件5包括第三微调机构50、第四微调机构51及复合手柄52。第二微调机构3、第三微调机构50及第四微调机构51依次相连。复合手柄52活动连接第二安装支架30,复合手柄52可沿其轴线在第三位置及第四位置之间移动,其中,在移动至第三位置时,复合手柄52与第三微调机构50相关联,以使得复合手柄52能够操纵第三微调机构50,在移动至第四位置时,复合手柄52与第四微调机构51相关联,以使得复合手柄52能够操纵第四微调机构51。
109.在复合手柄52与第三微调机构50相关联时,复合手柄可绕其自身轴线转动,以使
得第三微调机构50带动活动支架1沿第三轴线o3移动,第三轴线o3垂直于复合手柄52的轴线,复合手柄52的轴线平行于第二轴线o2。
110.在复合手柄52与第四微调机构51相关联时,复合手柄52可绕其自身轴线转动,以使得第四微调机构51带动活动支架1绕第四轴线o4转动,第四轴线o4垂直于复合手柄52的轴线,并且垂直于第三轴线o3。
111.第三微调机构50包括第三安装支架500和齿条501。第三安装支架 500滑动连接第二安装支架30,滑动方向与第三轴线o3相重合。齿条501 设置于第三安装支架500的靠近第二安装支架30的一侧。齿条501的长度方向平行于第三轴线o3,齿条501用于啮合复合手柄52,以实现复合手柄52与第三微调机构50相关联。
112.第三安装支架500包括第三安装板5000、顶板5001、底板5002及第二导向块5003。顶板5001设置于底板5002的上侧,第三安装板5000 设置于顶板5001及底板5002之间,顶板5001、底板5002及第三安装板5000的截面呈“工”字型。第三安装板5000的尺寸基本与第二安装板 300的尺寸一致。
113.齿条501及第二导向块5003皆设置于第三安装板5000的靠近第二安装板300的一侧。齿条501固定于顶板5001,第二导向块5003固定于第三安装板5000。
114.请参阅图21及图23,第二导向块5003滑动连接第二导轨303,以实现第三安装支架500滑动连接第二安装支架30。
115.在齿条501与复合手柄52相啮合,并且复合手柄52绕其自身轴线转动,由于齿条501固定于第三安装支架500,复合手柄52沿第三轴线 o3移动,并带动活动支架1、第一微调机构2及第二微调机构3一并沿第三轴线o3相对于第三安装支架500移动。
116.其中,复合手柄52在朝方向t1转动时,复合手柄52朝第一安装支架20的未设置有操纵手柄4的一侧移动,带动活动支架1、第一微调机构2及第二微调机构3一并朝第一安装支架20的未设置有操纵手柄4 的一侧移动,如图22所示;复合手柄52在朝方向t2转动时,复合手柄 52朝第一安装支架20的设置有操纵手柄4的一侧移动,带动活动支架 1、第一微调机构2级第二微调机构3一并朝第一安装支架20的设置有操纵手柄4的一侧移动,如图23所示。
117.请参阅图24及图25,第四微调机构51包括第四安装支架510、第三齿轮511、万向节512、第三丝杆513及第三滑块514。第四安装支架 510转动连接第三安装支架500,第三安装支架500关于第四安装支架 510的轴线与第四轴线o4相重合。
118.第三齿轮511转动连接第二安装支架30,第三齿轮511的轴线与复合手柄52的轴线相平行。第三丝杆513的一端通过万向节512连接第三齿轮511。第三滑块514转动连接第四安装支架510,第三滑块514关于第四安装支架510的轴线平行于第四轴线o4,第三滑块514套设于第三丝杆513的远离第三齿轮511的另一端,并与第三丝杆513相螺接。第三齿轮511用于与复合手柄52相啮合,以实现操纵手柄52与第四微调机构51相关联。
119.第四安装支架510包括第四安装板5100、转动轴5101及第二铰座 5102。第四安装板5100的尺寸与第三安装板5000的尺寸基本一致,第四安装板5100的远离第三安装板5000的一侧用于固定标定支架的主体部分。转动轴5101固定于第四安装板5100的靠近第三安装板5000的一侧,转动轴5101的轴线与第四轴线o4相重合,转动轴5101用于转动连接第三安装支架500。第二铰座5102固定于第四安装板5100的靠近第三安装板5000的一侧,第二铰座
5102的轴线平行于第四轴线o4,第三滑块514转动连接第二铰座5102,以实现第三滑块514转动连接第四安装支架510。
120.请参阅图26至图30,转动轴5101的上端嵌入顶板5001,转动轴 5101的下端嵌入底板5002,以实现第三安装支架500转动连接第四安装支架510。
121.在第三齿轮511与复合手柄52相啮合,并且复合手柄52绕其自身轴线转动时,复合手柄52带动第三齿轮511绕其自身轴线转动,第三齿轮511通过万向节512带动第三丝杆513一并转动,由于第三滑块514 转动连接第四安装支架510,第三丝杆513沿其自身轴线移动,通过万向节及第三齿轮推拉活动支架1、第一微调机构2、第二微调机构3及第三微调机构50,以使得活动支架1、第一微调机构2、第二微调机构 3及第三微调机构50绕第四轴线相对于第四安装支架510转动。
122.在第三微调机构50绕第四轴线o4相对于第四安装支架510转动时,由于第三微调机构50与第四安装支架510之间的角度发生了改变,第三连杆513与第三滑块514之间位置也发生了改变,通过第三丝杆513 与第三齿轮511之间设置万向节512,第三滑块514转动连接第四安装支架510,使得第三丝杆513及第三滑块514的角度能够相应调整,第三丝杆513的轴线与第三滑块514之间的角度保持不变,整个第四微调机构51不会卡死。
123.万向节512可以为鱼眼杆端关节轴承。
124.其中,复合手柄52在朝方向t1转动时,带动第三齿轮511朝方向t2转动,第三齿轮511通过万向节512带动第三丝杆513大致朝方向t2转动,第三丝杆513朝靠近第四安装支架510的方向移动,通过万向节512 及第三齿轮511拉动活动支架1、第一微调机构2、第二微调机构3及第三微调机构50,以使得活动支架1、第一微调机构2、第二微调机构 3及第三微调机构50朝方向n1转动,如图27和图28所示;复合手柄 52朝方向t2转动时,带动第三齿轮511朝方向t1转动,第三齿轮511通过万向节512带动第三丝杆513大致朝方向t1转动,第三丝杆朝远离第四安装支架510的方向移动,通过万向节512及第三齿轮511推动活动支架1、第一微调机构2、第二微调机构3及第三微调机构50,以使得活动支架1、第一微调机构2、第二微调机构3及第三微调机构50朝方向n2转动,如图29和图30所示。
125.请参阅图31和图32,第二安装板300上开设有贯穿其自身的手柄连接孔3000,手柄连接孔3000用于安装复合手柄52。
126.复合手柄52包括第二旋钮520、第二连接杆521及第四齿轮522。第二连接杆521的轴线与复合手柄52的轴线相重合,第二连接杆521穿设手柄连接孔3000,以实现复合手柄活动连接第二安装支架30。
127.第二连接杆521的一端延伸至第二安装板300的远离第三安装板 5000的一侧,并同轴固定第二旋钮520,第二连接杆521的另一端延伸至第二安装板300与第三安装板5000之间,并同轴固定第四齿轮522。第四齿轮522用于与齿条501或者第三齿轮511相啮合,以实现复合手柄52与第三微调机构50或者第四微调机构51相关联。
128.在复合手柄52移动至第三位置时,第四齿轮522与齿条501相啮合,并与第三齿轮511相分离,以实现复合手柄52与第三微调机构50 相关联,如图31所示;在复合手柄52移动至第四位置时,第四齿轮522 与第三齿轮511相啮合,并与齿条501相分离,以实现复合手柄52与第四微调机构51相关联,如图32所示。
129.手柄连接孔3000的内壁上开设有第三卡槽3001和第四卡槽3002。第三卡槽3001远
离第四齿轮522,第四卡槽3002靠近第四齿轮522。
130.复合手柄52还包括第二卡部523。第二卡部523凸设于第二连接杆 521的收容于手柄连接孔300内的部分的外周。
131.在复合手柄52移动至第三位置时,第二卡部523与第四卡槽3001 相卡接,如图31所示;在复合手柄52移动至第四位置时,第二卡部523 与第四卡槽3002相卡接,如图32所示。第二卡部523具有一定的弹性,可由具有一定弹性的材质制得,例如,橡胶、硅胶、塑胶。
132.第三卡槽3001、第四卡槽3002及第二卡部523皆呈环形结构,皆环绕第二连接杆521。
133.第二连接杆521的外周面上开设有第二环形安装槽,第二环形安装槽环绕第二连接杆521,第二卡部523套设于第二环形安装槽处。
134.通过设置第三卡槽3001、第四卡槽3002及第二卡部523,能够使得在复合手柄52在移动至第三位置或者第四位置时具有卡顿感,能够提醒使用者复合手柄52已经移动到第三位置或者第四位置。
135.可以理解,根据实际需要,由于第二微调机构的运作方式与第四微调机构的运作方式大致相同,第二微调机构的运作方式可以替换为第四微调机构的运作方式。具体地,在其他一些实施例中,第二微调机构包括第二安装支架、第一齿轮、万向节、第二丝杆及第二滑块。第二安装支架转动连接第一安装支架,第一安装支架关于第二安装支架的轴线与第二轴线相重合。第一齿轮转动连接第一安装支架,第一齿轮的轴线与操纵手柄的轴线相平行。第二丝杆通过万向节连接第一齿轮,第二滑块转动连接第二安装支架,第二滑块关于第二安装支架的轴线与第二轴线相平行,第二滑块套设于第二丝杆,并与第二丝杆相螺接。在操纵手柄沿其轴线移动至第二位置时,第二齿轮与第一齿轮相啮合,操纵手柄绕其自身轴线转动时带动第一齿轮转动,第一齿轮通过万向节带动第二丝杆转动,由于第二滑块转动连接第二安装支架,第二丝杆沿其自身轴线移动,通过万向节及第一齿轮推拉活动支架及第一微调机构,以使活动支架及第一微调机构绕第二轴线转动。
136.同理,第四微调机构的运作方式可以替换为第二微调机构的运作方式。具体地,第四微调机构包括第四安装支架、第三滑块、第三丝杆、第三齿轮及锁紧件。第四安装支架转动连接第三安装支架,第三安装支架关于第四安装支架的轴线与第四轴线相重合。锁紧件连接第四安装支架及第三滑块,锁紧件用于将第三滑块与第四安装支架压紧在一起,以使得第三滑块保持抵靠第四安装支架。第三丝杆转动连接第三安装支架,第三丝杆的轴线平行于复合手柄的轴线。第三齿轮同轴固定于第三丝杆。在复合手柄沿其自身轴线移动至第四位置时,第四齿轮与第三齿轮相啮合,复合手柄绕其自身轴线转动时带动第三齿轮转动,第三齿轮通过万向节带动第三丝杆转动,由于第三滑块抵靠第四安装支架,丝杆沿其轴线移动,推拉活动支架、第一微调机构、第二微调机构及第三微调机构,以使得活动支架、第一微调机构、第二微调机构及第三微调机构绕第四轴线转动。
137.本发明另一实施例提供一种标定支架,包括底座、立架、横梁及前述各实施例提供的挂载组件。立架的一端连接底座,横梁连接立架,挂载组件连接横梁。
138.与现有技术相比较,本发明实施例提供的挂载组件及标定支架中,在固定支架组件固定于标定支架的主体部分后,通过设置可在第一位置及第二位置之间移动的操纵手柄,操纵手柄移动至第一位置时与第一微调机构相关联,使得操纵手柄能够操纵第一微调
机构,操纵手柄移动至第二位置时与第二微调机构相关联,使得操纵手柄能够操纵第二微调机构,由此,只需要一个手柄即可实现对两个微调机构进行操纵,操作过程较为简便。
139.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;在本发明的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本发明的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参阅前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1