柔性相控阵时间延迟式的复杂曲面管式膜的无损检测方法
1.本发明涉及超声缺陷检测的工程技术领域,特别涉及柔性相控阵时间延迟式的复杂曲面管式膜的无损检测方法。
背景技术:
2.由于需要根据实际过滤地方的尺寸来决定管式膜的尺寸,因此需要生产出复杂曲面或者复杂结构的管式膜应用于实际生产需求。但是复杂曲面和复杂结构的管式膜用传统刚性超声相控阵探头难以与表面不规则工件实现完全接触,接触面上的空气间隙会导致巨大的声能量反射和声波扭曲,进而降低测试结果的可靠性。
3.2016年,马立印在《整体叶盘叶片焊缝裂纹相控阵超声检测》中根据叶片形状及尺寸特点,将叶片上下表面均分割为19个小截面,针对每个截面设计楔块,然后与超声阵列探头组成与叶片曲率一致的阵列探头,阵列探头的位置布置精度要求很高。使用楔形块的超声相控阵检测方法存在,楔形块制造时候耗时耗力,且每种尺寸楔形块只适用于特定尺寸型面工件,要想实现同种类型不同尺寸工件检测,需要重新制造楔形块,降低了检测效率,同时增加了制造成本与时间成本。
4.为了解决楔形块的缺点,j russell等人《inspection of components with irregular surfaces using a conformable ultrasonic phased array》中设计了一种膜包覆式相控阵探头对复杂曲面进行检测。此方法虽然经济实惠,但是膜的坚韧性在实际检测中易受到检测的对象的影响。2018年,h hu等人在《stretchable ultrasonic transducer arrays for three-dimensional imaging on complex surfaces》中研究出一种有弹性的二维柔性超声相控阵贴片,这种柔性超声相控阵探头可被用于检测各种异形结构的深层损伤和缺陷。探头由10*10的压电传感器阵列组成,采用“岛桥”布局,多层电极,由薄而柔软的硅弹性体封装。2021年,刘伟等人在《flexible and stretchable ultrasonic t ransducer array conformed to complex surfaces》中提出了一种由3*3元件组成的灵活且可拉伸的超声换能器阵列,以实现与各种非平面复杂表面的共形接触。2021年,浙江大学的朱智源、夏克泉等人在具有瞬态特性的柔性相控阵雷达(授权专利号:zl201710657615.5)通过改变相控阵雷达的形状,使其应用到各种复杂环境。相控阵雷达组件、互连线、柔性基底及自毁结构组成了柔性的相控阵雷达,没有进行超声波动态聚集于偏转的计算。
5.综上所述,虽然现在针对复杂曲面和复杂结构的超声缺陷检测,可以通过定制超声探头、定制楔形块、水浸法和膜法进行缺陷检测。但是以上方法对复杂曲面难以实现完全贴合的状态。即使柔性相控阵探头可以灵活适应工件曲率,紧密贴合在试件表面,也无法保证声波能在复杂的界面上很好地传递,不规则的工件形状也会使声波无法在目标区域充分聚焦。不准确的时间延迟式则会导致超声信号畸变和声能损失,继而影响缺陷定位和表征的灵敏度。本发明使用改进超声波束动态偏转与聚焦保证声波能在复杂的界面上很好地传递,不规则的工件形状也会使声波在目标区域充分聚焦。
技术实现要素:
6.本发明的目的是克服现有技术缺陷,提供柔性相控阵时间延迟式的复杂曲面管式膜的无损检测方法,结合柔性探头提出了柔性相控阵聚焦法,能够有效检测出复杂曲面管式膜的缺陷。
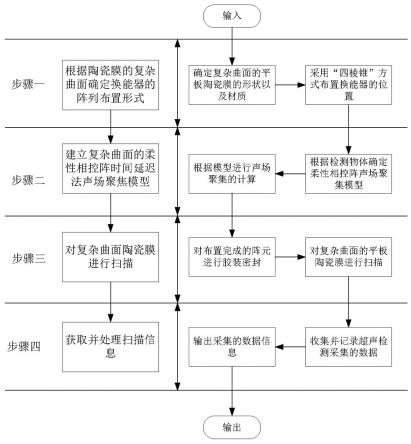
7.本发明的目的是这样实现的:一种柔性相控阵时间延迟式的复杂曲面管式膜的无损检测方法,包括以下步骤:
8.步骤1)根据陶瓷膜的复杂曲面确定换能器的阵列布置形式;
9.步骤2)建立复杂曲面的柔性相控阵时间延迟式声场聚焦模型;
10.步骤3)对复杂曲面陶瓷膜进行扫描;
11.步骤4)获取并处理扫描信息。
12.进一步的,所述步骤1)具体包括:
13.1-1)确定复杂曲面的平板陶瓷膜的形状和材质;通过陶瓷膜的复杂曲面确定换能器的数量和位置;
14.1-2)采用“四棱锥”方式布置换能器的位置;采集陶瓷膜的缺陷信号,使声波发生聚集。
15.进一步的,步骤1-2)中采用“四棱锥”方式布置换能器的位置具体步骤包括:
16.通过采用五个换能器组成“四棱锥”形,设阵元的正四边形边长为a,聚焦成像点的深度为h,c为试件纵波或者横波速度,脉冲反射法在垂直探伤时用纵波,在斜射探伤时用横波。以其他阵元传播时间为准,中间阵元延迟时间为t:
[0017][0018]
根据“四棱锥”建立聚焦公式为h(i,j),如式(2)所示:
[0019][0020]
其中,m为换能器的位置坐标,ζ为在t(i,j)时刻探测到的信号,阵元的正四边形边长为a,聚焦成像点的深度为h,c为试件纵波或者横波速度。
[0021]
进一步的,所述步骤2)具体包括:
[0022]
2-1)根据检测物体确定柔性相控阵声场聚集模型;
[0023]
2-2)根据模型进行声场聚集的计算。
[0024]
进一步的,所述步骤2-1)具体包括:
[0025]
假设阵列孔径为η,任意阵元为m,各个阵元的延迟时间为tm,基于射线声学理论进行建模求解:
[0026][0027]
其中,c为试件纵波或者横波速度,lm为任意阵元辐射声波路径;超声波纯偏转或聚焦时各个阵元延迟时间的计算实质是对声波路径lm进行求解。
[0028]
进一步的,所述步骤2-2)具体包括:
[0029]
任意阵元m的辐射声波沿着入射角θ
1m
在第一层介质传播到达入射点im,然后以折
射角θ
2m
在第二介质中传播到达聚集点f;声波在两层介质中传播遵循折射定律,如式(4)所示:
[0030][0031]
第m个阵元的延迟时间根据声线定理计算:
[0032][0033]
其中,l
1m
和l
2m
分别为声波在两种介质中的传播路径,c1和c2分别为两种介质中的纵波波速或横波波速,且c2>c1;
[0034]
由于陶瓷膜是同种介质,即l
1m
=l
2m
,c1=c2;第m个阵元的延迟时间为tm,根据等式关系并将(5)式化简为:
[0035][0036]
实际的声波路径取决于入射点im的位置,首先需要建立入射角θ
1m
和折射角θ
2m
关于βm的方程,其次根据式(7)、式(8)和折射定律求解βm;
[0037][0038][0039]
其中,
[0040]
将公式(7)(8)带入(9)中可得:
[0041][0042][0043]
柔性相控阵探头辐射的声波在两层介质中的传播时间为tm:
[0044][0045]
其中,βm入射点im与点d之间的圆心角,r
11
第二介质半径,r
12
第一介质半径,l
1m
和l
2m
分别为声波在两种介质中的传播路径;
[0046]
当在凸面进行阵元的扫描:
[0047][0048]
其中,
[0049]
当在凹面进行阵元的扫描:
[0050][0051]
其中,
[0052]
进一步的,所述步骤3)具体包括:
[0053]
3-1)对布置完成的阵元进行胶装密封;将配置好的硅胶液倒入事先放置好的换能器的模具里,放置后待硅胶凝固后取出含有换能器的硅胶,作为柔性超声探头;
[0054]
3-2)对复杂曲面的平板陶瓷膜进行扫描;通过使用步骤3-1)制作的柔性超声探头对复杂曲面的管式膜进行扫描。
[0055]
本发明采用以上技术方案,与现有技术相比,有益效果为:使用柔性探头不仅可以实现刚性探头的全部功能,而且在复杂曲面可以实现完全贴合的状态;结合柔性探头提出了柔性相控阵聚焦法,可以有效检测出复杂曲面陶瓷膜的缺陷,通过定义并计算了一种柔性相控阵声场聚焦的模型,不需要根据管式膜的表面去制作超声探头和楔形块,具有很强的独立性和适用性,与传统的刚性探头相比其检测结果也会更加稳定和准确。针对复杂曲面的管式膜选择五个换能器,采用“四棱锥”形式布置,四棱锥会形成四个三角形,可以提高超声检测的精度和检测的准确率。
附图说明
[0056]
图1本发明流程图;
[0057]
图2本发明五个换能器所组成“四棱锥”图;
[0058]
图3本发明柔性相控阵声场聚焦模型图。
具体实施方式
[0059]
如图1所示的一种柔性相控阵时间延迟式的复杂曲面管式膜的无损检测方法,包括以下步骤:
[0060]
步骤1)根据陶瓷膜的复杂曲面确定换能器的阵列布置形式;
[0061]
1-1)确定复杂曲面的平板陶瓷膜的形状和材质;通过陶瓷膜的复杂曲面确定换能器的数量和位置;
[0062]
1-2)采用“四棱锥”方式布置换能器的位置;采集陶瓷膜的缺陷信号,使声波发生聚集;如图2所示,针对复杂曲面的管式膜选择5个换能器,采用“四棱锥”形式布置,四棱锥
会形成四个三角形,可以提高超声检测的精度和检测的准确率;
[0063]
设阵元的正四边形边长为a,聚焦成像点的深度为h,c为试件纵波或者横波速度,脉冲反射法在垂直探伤时用纵波,在斜射探伤时用横波。以其他阵元传播时间为准,中间阵元延迟时间为t:
[0064][0065]
根据“四棱锥”建立聚焦公式为h(i,j),如式(2)所示:
[0066][0067]
其中,m为换能器的位置坐标,ζ为在t(i,j)时刻探测到的信号。
[0068]
步骤2)建立复杂曲面的柔性相控阵时间延迟式声场聚焦模型;
[0069]
如图3所示,2-1)根据检测物体确定柔性相控阵声场聚集模型;
[0070]
2-2)根据模型进行声场聚集的计算;
[0071]
假设阵列孔径为η,任意阵元为m,各个阵元的延迟时间为tm,基于射线声学理论进行建模求解:
[0072][0073]
其中,c为试件纵波或者横波速度,lm为任意阵元辐射声波路径;超声波纯偏转或聚焦时各个阵元延迟时间的计算实质是对声波路径lm进行求解。
[0074]
不管管式膜表面形状是凹面、凸面还是凹面加凸面,超声波纯偏转或聚焦时各个阵元延迟时间的计算实质都是对声波路径lm进行求解。
[0075]
任意阵元m的辐射声波沿着入射角θ
1m
在第一层介质传播到达入射点im,然后以折射角θ
2m
在第二介质中传播到达聚集点f;声波在两层介质中传播遵循折射定律:
[0076][0077]
第m个阵元的延迟时间根据声线定理计算:
[0078][0079]
其中,l
1m
和l
2m
分别为声波在两种介质中的传播路径,c1和c2分别为两种介质中的纵波波速或横波波速,且c2>c1;
[0080]
由于陶瓷膜是同种介质,即l
1m
=l
2m
,c1=c2;第m个阵元的延迟时间为tm,根据等式关系并将(5)式化简为:
[0081][0082]
实际的声波路径取决于入射点im的位置,首先需要建立入射角θ
1m
和折射角θ
2m
关于βm的方程,其次根据式(7)、式(8)和折射定律求解βm;
[0083][0084][0085]
其中,
[0086]
将公式(7)(8)带入(9)中可得:
[0087][0088][0089]
柔性相控阵探头辐射的声波在两层介质中的传播时间为tm:
[0090][0091]
其中,βm入射点im与点d之间的圆心角,r
11
第二介质半径,r
12
第一介质半径,l
1m
和l
2m
分别为声波在两种介质中的传播路径,c1和c2分别为两种介质中的纵波波速或横波波速。
[0092]
当在凸面进行阵元的扫描:
[0093][0094]
其中,
[0095]
当在凹面进行阵元的扫描:
[0096][0097]
其中,
[0098]
步骤3)对复杂曲面陶瓷膜进行扫描;
[0099]
3-1)对布置完成的阵元进行胶装密封;进行一比一进行混合配置型号为95的ab混合食品级硅胶液,将配置好的硅胶液倒入事先放置好的五个换能器(电路和导线已经连接完毕)地模具里,放置四个小时后待硅胶凝固后取出含有换能器的硅胶,即为柔性超声探
头;
[0100]
3-2)对复杂曲面的平板陶瓷膜进行扫描;通过使用步骤3-1)制作的柔性超声探头对复杂曲面的管式膜进行扫描。扫描时应使柔性探头(本发明制作的硅胶探头)紧贴管式膜的表面,检测时也可以采用耦合剂的方法可以避免接触面上的空气间隙发生巨大的声能量反射和声波扭曲,进而降低测试结果的可靠性。对于柔性探头采集的数据要及时保存方便后续的分析。
[0101]
步骤4)获取并处理扫描信息;
[0102]
计算机接收到经信号处理与缓存部分传过来的不同特征的数字信号,经过预先编制的处理程序进行处理和表征,可获取构件内部缺陷的位置、大小和方向等信息。
[0103]
本发明根据复杂曲面的平板陶瓷膜确定换能器的数量,然后通过柔性硅胶材料对五个换能器进行封装制作成了柔性超声探头,再通过改进超声波束动态偏转与聚焦保证声波能在复杂的界面上很好地传递,不规则的工件形状也会使声波在目标区域充分聚焦,使本发明在复杂曲面的平板陶瓷膜内部也具有很好地成像效果。
[0104]
本发明并不局限于上述实施例,在本发明公开的技术方案的基础上,本领域的技术人员根据所公开的技术内容,不需要创造性的劳动就可以对其中的一些技术特征作出一些替换和变形,这些替换和变形均在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1