铰接式自卸矿车的车速测量系统及方法与流程
1.本发明属于无人驾驶技术领域,特别涉及一种铰接式自卸矿车的车速测量系统及方法。
背景技术:
2.目前,国内矿石开采中矿石运输大多采用有人驾驶的矿用卡车来完成;由于采矿现场自然环境大多比较复杂恶劣,运输道路、连续作业等条件,导致运输司机的工作环境非常不友好,不利于司机的身体健康,且容易出现疲劳驾驶,事故频发;采用无人驾驶的矿用卡车替代有人驾驶来完成矿石运输任务是大势所趋,有利于改善司机的工作环境,提升运输效率,加强矿场安全运行管理,只需要少量的司机在室内进行车辆的远程监控和应急处理,即可完成无人化的运输任务。
3.铰接式自卸矿卡是矿场常用的一种运输工具,由于其车头和车厢连接处采用铰接式的连接方式,车辆转弯时,需要车头和车厢互相配合转动完成车辆的整体转向动作,车辆转向半径相对于车头和车厢刚性连接车辆的转向半径更小,更适合于在矿井下狭窄的矿道中行驶;由于铰接式自卸矿卡的本身设计、差速驱动和铰接式连接方式等原因,车辆在线控化改造和无人驾驶过程中,需要实时检测车辆速度;但现有的铰接式自卸矿卡均以有人驾驶为目标进行设计的,其并未设计和安装车速测量装置,且其机械结构也不支持安装;而线控化改造和无人驾驶又需要车速;因此,亟需一种车速检测手段以获取铰接式自卸矿车的实时车速。
技术实现要素:
4.针对现有技术中存在的技术问题,本发明提供了一种铰接式自卸矿车的车速测量系统及方法,以解决现有的铰接式自卸矿车无法检测实时车速的技术问题。
5.为达到上述目的,本发明采用的技术方案为:
6.本发明公开了一种铰接式自卸矿车的车速测量系统,包括对地测速雷达及车速计算模块;所述对地测速雷达安装在待测矿车的车头底盘上;
7.所述对地测速雷达,用于向地面发送预设频率的电波信号和接收回波信号,并输出回波信号的频率值;
8.所述车速计算模块,用于根据相邻时刻的回波信号的频率值,计算得到待测矿车的实时车速。
9.进一步的,还包括雷达安装支架;所述雷达安装支架包括水平支架和倾斜支架;所述水平支架固定在所述车头底盘上;所述倾斜支架按照预设安装角度倾斜固定在所述水平支架上;所述对地测速雷达固定安装在所述倾斜支架上。
10.进一步的,所述对地测速雷达与所述倾斜支架之间还设置有至少三个减震垫;所述至少三个减震垫呈等腰三角形分布在所述对地测速雷达与所述倾斜支架之间。
11.进一步的,所述对地测速雷达采用地面速度传感器parker vansco。
12.进一步的,所述对地测速雷达的检测面与车辆前进行走方向或车辆倒退行走方向相匹配。
13.进一步的,所述车辆计算模块采用嵌入预设车速计算程序的plc处理器;所述预设车速计算程序,用于实现根据相邻时刻的回波信号的频率值,计算得到待测矿车的实时车速的步骤。
14.进一步的,所述对地测速雷达距离地面的高度为100-600mm;所述对地测速雷达的检测面与地平面之间的夹角为35
°
。
15.本发明还提供了一种铰接式自卸矿车的车速测量方法,利用所述的一种铰接式自卸矿车的车速测量系统;方法包括:
16.向地面发送预设频率的电波信号,接收回波信号,并提取回波信号的频率值;
17.根据相邻时刻的回波信号的频率值,计算得到待测矿车的实时车速。
18.进一步的,根据相邻时刻的回波信号的频率值,计算得到待测矿车的实时车速的过程,具体如下:
19.计算当前时刻回波信号的频率值与上一时刻的回波信号的频率值之间的差值,得到相邻时刻回波信号的频率差值;
20.将所述相邻时刻回波信号的频率差值,输入值预设的速度-频率线性函数,输出得到所述待测矿车的实时车速。
21.进一步的,所述预设的速度-频率线性函数的构建过程,具体如下:
22.构建速度-频率线性初始函数;
23.将待测矿车以不同速度在测试路段上进行行驶,利用预设的交通速度检测装置,获取待测矿车的实际车速;并利用速度-频率线性初始函数,计算待测矿车的计算车速;
24.根据所述待测矿车的实际车速与待测矿车的计算车速的差值,对所述速度-频率线性初始函数的参数进行修正;
25.重复参数修正,以使所述待测矿车的实际车速与待测矿车的计算车速的差值满足预设条件,输出得到所述预设的速度-频率线性函数。
26.与现有技术相比,本发明的有益效果为:
27.本发明提供了一种铰接式自卸矿车的车速测量系统及方法,通过在待测矿车的车头底盘上安装对地测速雷达;所述对地测速雷达利用多普勒效应,将回波信号的频率值传输至车速计算模块;利用车速计算模块对相邻时刻的回波信号的频率值进行计算,实现获取待测矿车的实时车速;数据采集方便稳定,处理过程简易可靠;计算过程逻辑简单,获取的速度结果精度较高,稳定可靠;同时,避免了对矿车车辆原有机械结构的大幅改动,系统安装简单,安装位置选择难度较小。
附图说明
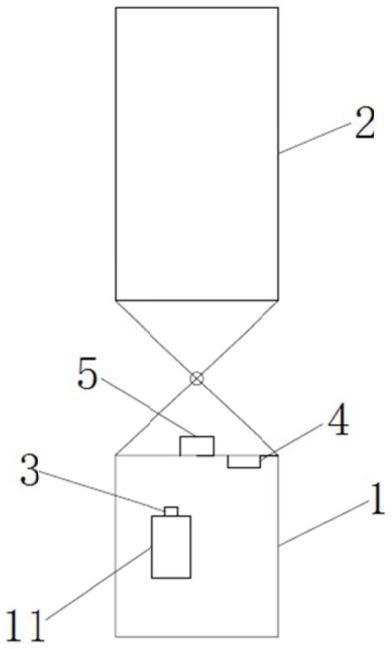
28.图1为实施例所述的车速测量系统的结构图;
29.图2为实施例中对地测速雷达的安装位置示意图;
30.图3为实施例所述的车速测量方法的流程图。
31.其中,1矿车车头,2矿车车厢,3对地测速雷达,4车速计算模块,5电源模块,6雷达安装支架;11车头底盘。
具体实施方式
32.为了使本发明所解决的技术问题,技术方案及有益效果更加清楚明白,以下具体实施例,对本发明进行进一步的详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
33.实施例
34.如附图1-2所示,本实施例提供了一种铰接式自卸矿车的车速测量系统,包括对地测速雷达2、车速计算模块4、电源模块5及雷达安装支架6;所述对地测速雷达3及车速计算模块4均安装在待测矿车上;所述待测矿车为铰接式自卸矿车。
35.所述铰接式自卸矿车,包括矿车车头1及矿车车厢2;所述对地测速雷达3通过雷达安装支架6安装在矿车车头1的车头底盘11上;所述车速计算模块4设置在待测矿车的驾驶室内;所述对地测速雷达3的输出端与车速计算模块4相连;所述电源模块5设置在待测矿车的车载控制柜内;所述电源模块5,用于对对地测速雷达3及车速计算模块4提供电源。
36.本实施例中,所述对地测速雷达3,用于向地面发送预设频率的电波信号和接收回波信号,并输出所述回波信号的频率值至所述车速计算模块4;所述对地测速雷达3距离地面的高度为100-600mm;所述对地测速雷达3的检测面与地平面之间的夹角为35
°
;所述对地测速雷达3的检测面与车辆前进行走方向或车辆倒退行走方向相匹配。
37.所述车速计算模块4,用于根据相邻时刻的回波信号的频率值,计算得到待测矿车的实时车速;其中,所述车辆计算模块4采用嵌入预设车速计算程序的plc处理器;所述预设车速计算程序,用于实现根据相邻时刻的回波信号的频率值,计算得到待测矿车的实时车速的步骤。
38.所述雷达安装支架6包括水平支架和倾斜支架,所述水平支架水平固定在所述车头底盘11上;所述倾斜支架按照预设安装角度,倾斜固定在所述水平支架的上方;其中,所述预设安装角度为35
°
;所述对地测速雷达3固定安装在所述倾斜支架上;其中,所述对地测速雷达3与所述倾斜支架之间还设置有至少三个减震垫;所述至少三个减震垫呈等腰三角形分布在所述对地测速雷达3余所述倾斜支架之间,利用三点减震手段,实现对所述对地测速雷达的减震要求。
39.本实施例所述的铰接式自卸矿车的车速测量系统,所述对地测速雷达3安装在雷达安装支架6上,所述雷达安装支架6固定在车头底盘11上;使用时,确保对地测速雷达3的检测面正前方无遮挡物,距离地面高度为100-600mm,且所述对地测速雷达3的检测面与地平面之间的夹角为35
°
;当所述对地测速雷达3的安装高度大于600mm时,采集的回波信号的频率数据偏差过大,而且不稳定;当所述对地测速雷达3的安装高度小于100mm时,则无法采集到回波信号的频率数据;所述对地测速雷达利用多普勒效应,将回波信号的频率值传输至车速计算模块;利用车速计算模块对相邻时刻的回波信号的频率值进行计算,实现获取待测矿车的实时车速;数据采集方便稳定,处理过程简易可靠。
40.如附图3所示,本实施例还提供了一种铰接式自卸矿车的车速测量方法,包括以下步骤:
41.步骤1、利用所述对地测速雷达3,向地面发送预设频率的电波信号和接收回波信号,并提取回波信号的频率值,发送所述回波信号的频率值至车速计算模块4;其中,所述预设频率的电波信号的传输速度大于等于待测矿车的车速。
42.步骤2、车速计算模块4接收所述回波信号的频率值,根据相邻时刻的回波信号的频率值,计算得到待测矿车的实时车速;具体过程如下:
43.计算当前时刻回波信号的频率值与上一时刻的回波信号的频率值之间的差值,得到相邻时刻回波信号的频率差值;
44.将所述相邻时刻回波信号的频率差值,输入值预设的速度-频率线性函数,输出得到所述待测矿车的实时车速;其中,所述预设的速度-频率线性函数的构建过程,具体如下:
45.构建速度-频率线性初始函数;
46.将待测矿车以不同速度在测试路段上进行行驶,利用预设的交通速度检测装置,获取待测矿车的实际车速;并利用速度-频率线性初始函数,计算待测矿车的计算车速;
47.根据所述待测矿车的实际车速与待测矿车的计算车速的差值,对所述速度-频率线性初始函数的参数进行修正;
48.重复参数修正,以使所述待测矿车的实际车速与待测矿车的计算车速的差值满足预设条件,输出得到所述预设的速度-频率线性函数。
49.工作原理:
50.本实施例所述的铰接式自卸矿车的车速测量系统及方法,通过在车头底盘上安装对地测速雷达,车辆行驶时,所述对地测速雷达发射的预设频率的电波信号,以电波的形式照射在地面上,经地面反射或散射后,形成回波信号;由于存在多普勒效应,所述回波信号将产生多普勒频移;根据相邻时刻的回波信号的频率差值,结合频率和速度的关系,计算得到待测矿车的实时速度;例如,待测矿车每行进1cm发送一个电波信号,将当前时刻回波信号的频率值与前一秒回波信号的频率值作差,所述差值除以100,即可得到所述待测矿车的车速。
51.本发明所述的铰接式自卸矿车的车速测量系统及方法,解决了铰接式自卸矿车在设计时,未设计和安装车速测量装置,通过在待测矿车的车头底盘上安装对地测速雷达;所述对地测速雷达利用多普勒效应,将回波信号的频率值传输至车速计算模块;利用plc控制器将对地测速雷达传输的频率数据进行换算,实现待测矿车实时速度的测量;数据采集方便稳定,处理过程简易可靠;计算过程逻辑简单,获取的速度结果精度较高,稳定可靠;同时,避免了对矿车车辆原有机械结构的大幅改动,系统安装简单,安装位置选择难度较小。
52.上述实施例仅仅是能够实现本发明技术方案的实施方式之一,本发明所要求保护的范围并不仅仅受本实施例的限制,还包括在本发明所公开的技术范围内,任何熟悉本技术领域的技术人员所容易想到的变化、替换及其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1