一种基于离线MBM滤波器的多目标跟踪方法和装置
一种基于离线mbm滤波器的多目标跟踪方法和装置
技术领域
1.本技术涉及多目标跟踪技术领域,特别是涉及一种基于离线mbm滤波器的多目标跟踪方法和装置。
背景技术:
2.多目标跟踪(multi-target tracking,mtt)的目的是从一系列不完美的传感器量测中估计场景中目标的数目和运动状态,甚至给出每个目标的轨迹。经过半个多世纪的发展,多目标跟踪技术已经广泛应用于民用和军事领域,包括导航和监视、遥感、空中交通管制、计算机视觉等等。传统的基于数据关联的多目标跟踪算法,如联合概率数据关联(joint probability data association,jpda)滤波器和多假设跟踪(multiple hypothesis tracking,mht)算法,面临密集杂波环境下的组合爆炸问题和复杂场景下跟踪性能下降的问题。
3.近年提出的基于随机有限集(random finite sets,rfs)的多目标跟踪滤波器具有贝叶斯意义上的最佳跟踪性能。在实际应用中,遮挡、目标变形、目标隐身、低信噪比等因素造成传感器的检测概率较低,常规多目标跟踪算法往往失效。多伯努利混合(multi-bernoulli mixture,mbm)滤波器是一种精确封闭的多目标贝叶斯滤波器,具有多目标共轭先验密度,可提供mtt问题的精确封闭解。
4.然而,标准的mbm滤波器在低检测概率场景下存在输出航迹中断、航迹终结滞后、假目标多等问题。
技术实现要素:
5.基于此,有必要针对上述技术问题,提供一种能够避免目标因连续多帧漏检而丢失,避免杂波引起的假目标,有效提高低检测概率场景下的多目标跟踪性能的基于离线mbm滤波器的多目标跟踪方法和装置。
6.一种基于离线mbm滤波器的多目标跟踪方法,所述方法包括:
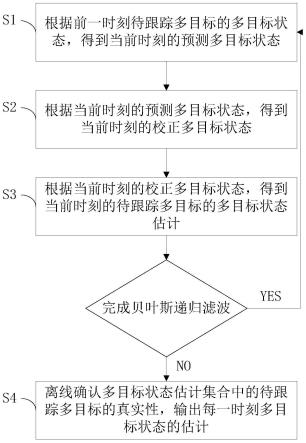
7.根据前一时刻待跟踪多目标的多目标状态,得到当前时刻的预测多目标状态;
8.根据当前时刻的预测多目标状态和当前时刻的待跟踪多目标的真实量测信息之间的关联函数对待跟踪多目标进行校正,得到当前时刻的校正多目标状态;
9.根据当前时刻的校正多目标状态,采用门限对待跟踪多目标进行剔除,得到当前时刻的待跟踪多目标的多目标状态估计,循环上述步骤直至完成贝叶斯递归滤波,得到多目标状态估计集合;
10.通过显著性检验离线确认多目标状态估计集合中各个待跟踪多目标的真实性,得到目标确认集,并根据目标确认集输出每一时刻多目标状态的估计。
11.在其中一个实施例中,根据前一时刻待跟踪多目标的多目标状态,得到当前时刻的预测多目标状态,包括:
12.根据前一时刻的后验mbm密度,计算粒子的幸存概率;
13.根据粒子的幸存概率,得到当前时刻存活目标的预测密度函数和当前时刻新生目标的预测密度函数;
14.根据当前时刻存活目标的预测密度函数和当前时刻新生目标的预测密度函数,得到当前时刻的离线mbm滤波器的预测密度;
15.前一时刻的后验mbm密度表示为:
[0016][0017]
式中,k表示前一时刻,k时刻的后验mbm密度由多个先验假设组成,第h个先验假设的权值为w
k|k,h
,伯努利rfsx
l
表示标签为l的目标,f
h,l
表示为标签为l的目标在第h个假设中的密度函数,由存在概率r
h,l
和粒子系统描述,粒子系统是标签为l的目标在h第个假设中存在时的状态密度,表示在第h个假设中标签为l的目标的第p个粒子,n是粒子数;
[0018]
粒子的幸存概率表示为:
[0019][0020]
式中,表示幸存概率的上界,f表示单目标运动方程中的状态转移矩阵,二值函数f
fov
(x)表示粒子x是否在传感器观测区域内
[0021][0022]
当前时刻的离线mbm滤波器的预测密度表示为:
[0023][0024]
式中,k+1表示当前时刻,k+1时刻离线mbm滤波器的预测密度和k时刻的后验mbm密度具有相同的假设数目和假设权值(w
k+1|k,h
=w
k|k,h
),f
′
h,l
表示k+1时刻存活目标的预测密度函数,nb表示每个假设中的新生目标数目,每个所述新生目标用一个伯努利rfs表示,fi表示第i个新生目标的密度函数,第i个新生目标被赋予标签(k+1,i)。
[0025]
在其中一个实施例中,根据当前时刻的预测多目标状态和当前时刻的待跟踪多目标的真实量测信息之间的关联函数对待跟踪多目标进行校正,得到当前时刻的校正多目标状态,包括:
[0026]
在第h个先验假设条件下,遍历k+1时刻的预测多目标状态的目标状态x
l
和k+1时刻的待跟踪多目标的真实量测信息zi的组合,计算粒子似然和;
[0027]
设置目标x
l
和量测zi之间的关联函数为θ,在第h个先验假设条件下,利用吉布斯采样生成个后验假设,每一个后验假设对应一个关联函数θ,根据关联函数θ判断
待跟踪多目标是否漏检;
[0028]
对每个先验假设生成的后验假设的目标状态进行校正,计算归一化的后验假设权值,得到k+1时刻的后验mbm密度。
[0029]
在其中一个实施例中,计算粒子似然和的步骤包括:
[0030]
目标x
l
与所述量测zi关联时,粒子似然和表示为:
[0031][0032]
目标x
l
漏检时,粒子似然和可以表示为:i
l,i
=0。
[0033]
在其中一个实施例中,根据关联函数θ判断待跟踪多目标是否漏检,包括:目标x
l
与量测zi关联时,关联函数θ≠0,目标x
l
的后验存在概率为1,后验状态密度函数由粒子系统描述;
[0034]
目标x
l
漏检时,关联函数θ=0,目标x
l
的后验存在概率为其中,pd为系统检测概率,后验状态密度函数不变,由粒子系统描述。
[0035]
在其中一个实施例中,对每个所述先验假设生成的后验假设的目标状态进行校正,计算归一化的后验假设权值,得到k+1时刻的后验mbm密度,包括:
[0036]
归一化的所述后验假设权值表示为:
[0037][0038]
式中,w
′
k+1|k+1,(h,θ)
表示未归一化的后验假设权值;
[0039]
k+1时刻的后验mbm密度表示为:
[0040][0041]
式中,w
k+1|k+1,h
表示第h个后验假设的权值。
[0042]
在其中一个实施例中,根据当前时刻的校正多目标状态,采用门限对待跟踪多目标进行剔除,得到当前时刻的待跟踪多目标的多目标状态估计,包括:
[0043]
根据目标x
l
在第h个后验假设中的存在概率r
h,l
剔除目标;
[0044]
根据目标x
l
在第h个后验假设中的幸存概率剔除目标;
[0045]
根据第h个后验假设的权值w
k+1|k+1,h
剔除假设,得到当前时刻的所述待跟踪多目标的多目标状态估计。
[0046]
在其中一个实施例中,根据第h个后验假设的权值w
k+1|k+1,h
剔除假设,得到当前时刻的待跟踪多目标的多目标状态估计,包括:
[0047]
选择具有最大后验假设权值的假设判定为真实假设,根据真实假设的数据关联情况,得到k+1时刻的待跟踪多目标的多目标状态估计表示为:
[0048][0049]
在其中一个实施例中,通过显著性检验离线确认多目标状态估计集合中各个待跟踪多目标的真实性,得到目标确认集,包括:
[0050]
计算检验统计量u
[0051][0052]
式中,n为所述目标x
l
的存活时间(从出生到死亡),pg为正确量测落入椭圆波门内的概率,变量f
mea
(l,k)表示目标x
l
在k时刻是否存在真实量测信息,f
mea
(l,k)=1表示标签为l的目标在k时刻有量测,否则,f
mea
(l,k)=0;
[0053]
设置显著性水平为α,当|u|小于高斯分布分位数u
1-α/2
时,判定目标x
l
为真实目标,将真实目标加入目标确认集否则,判定目标x
l
为假目标。
[0054]
一种基于离线mbm滤波器的多目标跟踪装置,所述装置包括:
[0055]
预测单元,根据前一时刻待跟踪多目标的多目标状态,得到当前时刻的预测多目标状态;
[0056]
校正单元,根据当前时刻的预测多目标状态和当前时刻的待跟踪多目标的实量测信息之间的关联函数对待跟踪多目标进行校正,得到当前时刻的校正多目标状态;
[0057]
剔除单元,根据当前时刻的校正多目标状态,采用门限对待跟踪多目标进行剔除,得到当前时刻的待跟踪多目标的多目标状态估计,循环上述步骤直至完成贝叶斯递归滤波,得到多目标状态估计集合;
[0058]
离线确认单元,通过显著性检验离线确认多目标状态估计集合中各个待跟踪多目标的真实性,得到目标确认集,并根据目标确认集输出每一时刻多目标状态的估计。
[0059]
上述一种基于离线mbm滤波器的多目标跟踪方法中,采用离线mbm滤波器对待跟踪的多目标状态进行预测、校正、剔除和离线确认得到每一时刻多目标状态的估计,与现有技术相比,本发明根据当前时刻的预测多目标状态和当前时刻的待跟踪多目标的真实量测信息之间的关联函数判断待跟踪多目标是否漏检,从而避免目标因连续多帧漏检而丢失;采用门限对待跟踪多目标进行剔除,减少计算量;通过显著性检验离线确认待跟踪多目标的真实性,避免杂波引起的假目标,有效提高了低检测概率场景下多目标跟踪性能。
附图说明
[0060]
图1为一个实施例中一种基于离线mbm滤波器的多目标跟踪方法的流程示意图;
[0061]
图2为一个实施例中一种基于离线mbm滤波器的多目标跟踪装置的结构框图;
具体实施方式
[0062]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅用以解释本技术,并不用于限定本技术。
[0063]
在一个实施例中,如图1所示,提供了一种基于离线mbm滤波器的多目标跟踪方法,包括以下步骤:
[0064]
步骤s1,根据前一时刻待跟踪多目标的多目标状态,得到当前时刻的预测多目标状态:
[0065]
可以理解,在进行步骤s1之前,还需要对离线mbm滤波器初始化,即设置初始时刻的后验mbm密度为0;
[0066]
可以理解,前一时刻待跟踪多目标的多目标状态由前一时刻的后验mbm密度描述,当前时刻的预测多目标状态由当前时刻的离线mbm滤波器的预测密度描述,由于预测符合一阶马尔科夫过程,即前一时刻的多目标状态已知时,当前时刻的多目标状态仅与前一时刻有关而与其他的变量无关,由此可根据前一时刻的后验mbm密度预测得到当前时刻的离线mbm滤波器的预测密度。
[0067]
步骤s2,根据当前时刻的预测多目标状态和当前时刻的待跟踪多目标的真实量测信息之间的关联函数对待跟踪多目标进行校正,得到当前时刻的校正多目标状态:
[0068]
可以理解,根据当前时刻的预测多目标状态和当前时刻的待跟踪多目标的真实量测信息之间的关联函数判断待跟踪多目标是否漏检,计算得到当前时刻的校正多目标状态,其中,当前时刻的校正多目标状态由当前时刻的后验mbm密度描述。
[0069]
步骤s3,根据当前时刻的校正多目标状态,采用门限对待跟踪多目标进行剔除,得到当前时刻的待跟踪多目标的多目标状态估计,循环上述步骤直至完成贝叶斯递归滤波,得到多目标状态估计集合:
[0070]
可以理解,由于在对当前时刻的预测多目标状态进行校正得到当前时刻的校正多目标状态时,会产生许多虚假目标和错误假设,增加计算量,因此,需要采用门限对待跟踪多目标进行剔除,降低计算量,得到当前时刻的待跟踪多目标的多目标状态估计。循环s1、s2、s3直至完成贝叶斯递归滤波,得到多目标状态估计集合。
[0071]
步骤s4,通过显著性检验离线确认多目标状态估计集合中各个待跟踪多目标的真实性,得到目标确认集,并根据目标确认集输出每一时刻多目标状态的估计:
[0072]
可以理解,在多目标状态估计集合中仍然存在部分由于杂波产生的假目标,影响多目标跟踪结果的准确性,因此,需要对多目标状态估计集合中各个待跟踪多目标的真实性进行判断,具体通过显著性检验离线确认待跟踪多目标的真实性,得到目标确认集,并根据目标确认集输出每一时刻多目标状态的估计。
[0073]
上述一种基于离线mbm滤波器的多目标跟踪方法中,采用离线mbm滤波器对待跟踪的多目标状态进行预测、校正、剔除和离线确认得到每一时刻多目标状态的估计,与现有技术相比,本发明根据当前时刻的预测多目标状态和当前时刻的待跟踪多目标的真实量测信息之间的关联函数判断待跟踪多目标是否漏检,从而避免目标因连续多帧漏检而丢失;采用门限对待跟踪多目标进行剔除,减少计算量;通过显著性检验离线确认待跟踪多目标的真实性,避免杂波引起的假目标,有效提高了低检测概率场景下多目标跟踪性能。
[0074]
在一个实施例中,步骤s1根据前一时刻待跟踪多目标的多目标状态,得到当前时刻的预测多目标状态,具体包括:
[0075]
s1.1根据前一时刻的后验mbm密度,计算粒子的幸存概率:
[0076]
其中,假设前一时刻为k时刻,则k时刻后验mbm密度为
[0077][0078]
式中,k时刻的后验mbm密度由多个先验假设组成,第h个先验假设的权值为w
k|k,h
,所有权值的和等于1,即∑hw
k|k,h
=1,每个假设中的目标数都相等,伯努利rfsx
l
表示标签为l的目标,该目标在每个假设中的参数都不同,f
h,l
表示为标签为l的目标在所述第h个假设中的密度函数,由存在概率r
h,l
和粒子系统描述,粒子系统是标签为l的目标在h第个假设中存在时的状态密度,表示在第h个假设中标签为l的目标的第p个粒子,n是粒子数;
[0079]
其中,粒子的幸存概率为
[0080][0081]
式中,表示幸存概率的上界,f表示单目标运动方程中的状态转移矩阵,二值函数f
fov
(x)表示粒子x是否在传感器观测区域内
[0082][0083]
s1.2根据粒子的幸存概率,得到当前时刻存活目标的预测密度函数和当前时刻新生目标的预测密度函数:
[0084]
当前时刻从单目标马尔可夫转移密度中采样得到预测粒子预测粒子在第h个假设中标签为l的目标仍用伯努利rfsx
l
表示,当前时刻的存活目标的预测密度函数为f
′
h,l
,由下述存在概率和粒子系统描述
[0085][0086][0087]
式(5)不是等权值粒子系统,重采样技术将其替换成等权值粒子系统;
[0088]
当前时刻共有nb个新生目标,每个新生目标用一个伯努利rfs表示,第i个新生目
标的密度函数为fi,由存在概率和粒子系统描述,粒子是从密度函数中采样得到,第i个新生目标被赋予标签(k+1,i)。
[0089]
s1.3根据当前时刻存活目标的预测密度函数和当前时刻新生目标的预测密度函数,得到当前时刻的离线mbm滤波器的预测密度:
[0090]
其中,假设当前时刻为k+1时刻,k+1时刻离线mbm滤波器的预测密度和k时刻的后验mbm密度具有相同的假设数目和假设权值(w
k+1|k,h
=w
k|k,h
),每个假设中的目标数目增加nb,即用新生目标的伯努利组分来扩充每个假设,k+1时刻离线mbm滤波器的预测密度为
[0091][0092]
公式(6)可简写成
[0093][0094]
式(7)中符号的含义和式(1)类似,式中,f
h,l
由存在概率r
h,l
和粒子系统描述,该粒子系统是目标状态密度p
h,l
的近似。
[0095]
在一个实施例中,步骤s2根据当前时刻的预测多目标状态和当前时刻的待跟踪多目标的真实量测信息之间的关联函数对待跟踪多目标进行校正,得到当前时刻的校正多目标状态,具体包括:
[0096]
s2.1在第h个先验假设条件下,遍历k+1时刻的预测多目标状态的目标状态x
l
和k+1时刻的待跟踪多目标的真实量测信息zi的组合,计算粒子似然和;
[0097]
s2.2设置目标x
l
和量测zi之间的关联函数为θ,在第h个先验假设条件下,利用吉布斯采样生成个后验假设,每一个后验假设对应一个关联函数θ,根据关联函数θ判断待跟踪多目标是否漏检;
[0098]
s2.3对每个先验假设生成的后验假设的目标状态进行校正,计算归一化的后验假设权值,得到k+1时刻的后验mbm密度。
[0099]
在一个实施例中,步骤s2.1中计算粒子似然和的步骤包括:
[0100]
可以理解,k+1时刻的预测多目标状态的目标状态为{x
l
,l=1,2,
…
,n},k+1时刻的待跟踪多目标的真实量测信息为{zi,i=1,
…
,m},目标x
l
与量测zi的粒子似然和用i
l,i
表示,目标x
l
的状态密度由粒子描述,单目标量测函数为h(
·
),量测噪声协方差矩阵为r,计算残差和残差协方差分别为
[0101]
[0102][0103]
式中,pg为正确量测落入椭圆波门内的概率,采用椭圆波门的门限判定目标x
l
是否漏检,其中,dm为量测向量的维度,当时,判定目标x
l
漏检,粒子似然和i
l,i
=0,否则,粒子似然和为
[0104][0105]
在一个实施例中,步骤s2.2根据关联函数θ判断待跟踪多目标是否漏检包括:
[0106]
设置k+1时刻的预测多目标状态的目标状态{x
l
,l=1,2,
…
,n}和k+1时刻的待跟踪多目标的真实量测信息{zi,i=1,
…
,m}之间的关联函数为θ:{1,
…
,n}
→
{0,1,
…
,m},如果θ(l)=θ(l
′
)≠0,必然有l=l
′
,l
→
θ(l)≠0表示目标x
l
和量测zi关联,否则,l
→
θ(l)=0表示目标x
l
漏检,未关联的量测被认为是杂波,是强度为c(
·
)泊松rfs;
[0107]
在第h个先验假设条件下,利用吉布斯采样生成个后验假设,一个后验假设对应一种关联θ,用向量θ=[θ(1),
…
,θ(n)]表示,吉布斯采样将关联向量的初始值设为θ=[0,
…
,0],从第一维到最后一维逐个采样,即完成一次关联向量的采样,具体地,第l维的采样方法如下:其余n-1个目标的关联情况已知,即已知向量θ-l
=[θ(1),
…
,θ(l-1),θ(l+1),
…
,θ(n)],则目标x
l
的关联情况,即θ(l)的可能取值在下述集合中产生
[0108]
{0,1,
…
,m}\θ-l
∪{0}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0109]
现在随机地从上述集合中选择一个数,作为θ(l)的取值,每个数被选中的概率是不同的,这个概率就是条件概率pr(θ(l)|θ-l
),条件概率pr(θ(l)|θ-l
)正比于目标x
l
对该后验假设的贡献c
l
,计算如下:
[0110]
当θ(l)≠0时,
[0111][0112]
当θ(l)=0时,
[0113]cl
=1-r
h,l
pdꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0114]
式中,pd为系统检测概率,根据条件概率pr(θ(l)|θ-l
)完成第l维的采样,从第一维到最后一维逐个采样,即完成一次关联向量的采样,形成一个样本值,然后以此次关联向量为初值,从第一维到最后一维逐个采样,即完成第二次关联向量的采样,形成第二个样本值,总共需要个样本值,舍弃初始阶段的n
ini
个样本值,然后每隔n
spa
个样本选取一个样本,总共选取个关联向量,即第h个先验假设生成个后验假设;
[0115]
目标x
l
与量测zi关联时,关联函数θ≠0,目标x
l
的后验存在概率为1,后验状态密度
函数由粒子系统描述,其中,粒子系统不是等权值粒子系统,重采样技术将其替换成等权值粒子系统;
[0116]
目标x
l
漏检时,关联函数θ=0,目标x
l
的后验存在概率为其中,后验状态密度函数不变,由粒子系统描述。
[0117]
在一个实施例中,步骤s2.3对每个先验假设生成的后验假设的目标状态进行校正,计算归一化的后验假设权值,得到k+1时刻的后验mbm密度,包括:
[0118]
对每个先验假设生成的后验假设的目标状态进行校正是指首先遍历完成所有目标{x
l
,l=1,2,
…
,n}的状态校正,即完成了该后验假设的目标状态校正,然后遍历完成个后验假设的目标状态校正,最后遍历所有先验假设,依次执行s2.1、s2.2,完成每个先验假设生成的所有后验假设的目标状态校正;
[0119]
归一化的所述后验假设权值为
[0120][0121]
式中,w
′
k+1|k+1,(h,θ)
表示未归一化的后验假设权值,w
′
k+1|k+1,(h,θ)
是先验假设权值w
k+1|k,h
和每个目标的贡献c
l
的乘积
[0122][0123]
计算归一化的后验假设权值的目的在于使所有后验假设权值之和为1,便于与固定的门限进行比较;
[0124]
k+1时刻的后验mbm密度为
[0125][0126]
式(16)中符号的含义和式(1)类似,w
k+1|k+1,h
表示第h个后验假设的权值,f
h,l
由存在概率r
h,l
和粒子系统描述,该粒子系统是目标状态密度p
h,l
的近似;
[0127]
至此,完成离线mbm滤波器校正,避免了待跟踪多目标因连续多帧漏检而丢失,得到了当前时刻的校正多目标态。
[0128]
在一个实施例中,步骤s3根据当前时刻的校正多目标状态,采用门限对待跟踪多目标进行剔除,得到当前时刻的待跟踪多目标的多目标状态估计,循环上述步骤直至完成贝叶斯递归滤波,得到多目标状态估计集合,具体包括:
[0129]
s3.1根据目标x
l
在第h个后验假设中的存在概率r
h,l
剔除目标:
[0130]
其中,第h个后验假设的权值为w
k+1|k+1,h
,目标x
l
在第h个后验假设中的存在概率为r
h,l
,为了保持所有后验假设中的目标相同,当目标x
l
满足∑hw
k+1|k+1,hrh,l
<r
p
时,在所有后验假设中将该目标剔除,其中r
p
为门限,可以理解,根据存在概率主要是剔除待跟踪多目标中的假目标,降低计算量。
[0131]
s3.2根据目标x
l
在第h个后验假设中的幸存概率剔除目标:
[0132]
其中,目标x
l
在第h个后验假设中的幸存概率为为了保持所有后验假设中的目标相同,当目标x
l
满足时,在所有后验假设中将该目标剔除,其中为门限,可以理解,根据幸存概率主要是剔除待跟踪多目标中已经离开的目标,降低计算量。
[0133]
s3.3根据第h个后验假设的权值w
k+1|k+1,h
剔除假设,得到当前时刻的待跟踪多目标的多目标状态估计:
[0134]
其中,第h个后验假设的权值满足w
k+1|k+1,h
<w
p
时,剔除第h个后验假设,其中w
p
为门限,可以理解,根据归一化的后验假设权值主要是剔除后验假设中的错误假设,降低计算量。
[0135]
在一个实施例中,步骤s3.3根据第h个后验假设的权值w
k+1|k+1,h
剔除假设,得到当前时刻的待跟踪多目标的多目标状态估计,包括:
[0136]
选择具有最大后验假设权值的假设判定为真实假设,根据真实假设的数据关联情况,得到k+1时刻的待跟踪多目标的多目标状态估计为
[0137][0138]
同时记录每个目标的幸存概率
[0139]
在一个实施例中,步骤s4通过显著性检验离线确认多目标状态估计集合中各个待跟踪多目标的真实性,得到目标确认集,具体包括:
[0140]
计算检验统计量u
[0141][0142]
式中,n为所述目标x
l
的存活时间(从出生到死亡),变量f
mea
(l,k)表示目标x
l
在k时刻是否存在真实量测信息
[0143][0144]
设置显著性水平为α,当|u|小于高斯分布分位数u
1-α/2
时,判定目标x
l
为真实目标,将真实目标加入目标确认集否则,判定目标x
l
为假目标。
[0145]
应该理解的是,虽然图1流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图1中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
[0146]
在一个实施例中,如图2所示,提供了一种基于离线mbm滤波器的多目标跟踪装置,包括预测单元、校正单元、剔除单元和离线确认单元,其中:
[0147]
预测单元,根据前一时刻待跟踪多目标的多目标状态,得到当前时刻的预测多目标状态:
[0148]
可以理解,根据前一时刻待跟踪多目标的多目标状态,得到当前时刻的预测多目标状态,包括:根据前一时刻的后验mbm密度,计算粒子的幸存概率;根据粒子的幸存概率,得到当前时刻存活目标的预测密度函数和当前时刻新生目标的预测密度函数;根据当前时刻存活目标的预测密度函数和当前时刻新生目标的预测密度函数,得到当前时刻的离线mbm滤波器的预测密度。
[0149]
校正单元,根据当前时刻的预测多目标状态和当前时刻的待跟踪多目标的真实量测信息之间的关联函数对待跟踪多目标进行校正,得到当前时刻的校正多目标状态:
[0150]
可以理解,根据当前时刻的预测多目标状态和当前时刻的待跟踪多目标的真实量测信息之间的关联函数对待跟踪多目标进行校正,得到当前时刻的校正多目标状态,包括:在第h个先验假设条件下,遍历k+1时刻的预测多目标状态的目标状态x
l
和k+1时刻的待跟踪多目标的真实量测信息zi的组合,计算粒子似然和;设置目标x
l
和量测zi之间的关联函数为θ,在第h个先验假设条件下,利用吉布斯采样生成个后验假设,每一个后验假设对应一个关联函数θ,根据关联函数θ判断待跟踪多目标是否漏检;对每个先验假设生成的后验假设的目标状态进行校正,计算归一化的后验假设权值,得到k+1时刻的后验mbm密度。
[0151]
剔除单元,根据当前时刻的校正多目标状态,采用门限对待跟踪多目标进行剔除,得到当前时刻的待跟踪多目标的多目标状态估计,循环上述步骤直至完成贝叶斯递归滤波,得到多目标状态估计集合:
[0152]
可以理解,根据当前时刻的校正多目标状态,采用门限对待跟踪多目标进行剔除,得到当前时刻的待跟踪多目标的多目标状态估计,包括:根据目标x
l
在第h个后验假设中的存在概率r
h,l
剔除目标;根据目标x
l
在第h个后验假设中的幸存概率剔除目标;根据第h个后验假设的权值w
k+1|k+1,h
剔除假设,得到当前时刻的待跟踪多目标的多目标状态估计。
[0153]
可以理解,根据第h个后验假设的权值w
k+1|k+1,h
剔除假设,得到当前时刻的待跟踪多目标的多目标状态估计,包括:选择具有最大后验假设权值的假设判定为真实假设,根据真实假设的数据关联情况,得到k+1时刻的待跟踪多目标的多目标状态估计。
[0154]
离线确认单元,通过显著性检验离线确认多目标状态估计集合中各个待跟踪多目
标的真实性,得到目标确认集,并根据目标确认集输出每一时刻多目标状态的估计:
[0155]
可以理解,通过显著性检验离线确认多目标状态估计集合中各个待跟踪多目标的真实性,得到目标确认集,包括:设置显著性水平为α,当检验统计量|u|小于高斯分布分位数u
1-α/2
时,判定目标x
l
为真实目标,将真实目标加入目标确认集否则,判定目标x
l
为假目标。
[0156]
关于一种基于离线mbm滤波器的多目标跟踪装置的具体限定可以参见上文中对于一种基于离线mbm滤波器的多目标跟踪方法的限定,在此不再赘述。上述一种基于离线mbm滤波器的多目标跟踪装置中的各个单元可全部或部分通过软件、硬件及其组合来实现。上述各单元可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个单元对应的操作。
[0157]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0158]
以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1