一种24GHz毫米波雷达安检仪成像方法
一种24ghz毫米波雷达安检仪成像方法
技术领域
1.本发明涉及毫米波雷达成像领域,更具体的说是涉及一种24ghz毫米波雷达安检仪成像方法。
背景技术:
2.毫米波雷达的研制是从上世纪40年代开始的,由于毫米波雷达高分辨力、高精度、小天线口径等优点,上世纪50年代开始人们开始研究毫米波成像技术。许多早期研究将毫米波成像系统用于检测机场、隐藏武器和违禁品上。相对于金属安检门、手持式金属探测仪等传统安检手段,使用毫米波雷达进行安检对人体辐射小,除了能够检测出金属制违禁品,还能够检测玻璃、塑料等制成的非金属违禁品。但早期的毫米波雷达成像系统的射频前端笨重、造价高昂,难以实现移动式的应用。
3.2019年,一个研究团队提出了使用77ghz商用fmcw毫米波系统二维近场成像,成功在穿过阻挡物的情况下对目标物体成像,这极大地缩小了设备的尺寸,并在一定程度上降低了成本。然而相比于24ghz商用雷达,77ghz雷达的成本仍然相对较高,穿透力仍然相对不足,尽管该频段的雷达能够提供一般近场成像所需的大带宽。具体而言,当成像系统采用商用低成本24ghz毫米波雷达时,由于其提供的带宽较窄,对近距离目标物体成像时会导致中频信号无法在观察窗中呈现一个完整的周期,此时,若将该中频信号直接经过fft处理就会出现相位偏差,从而影响最终成像的分辨率。
技术实现要素:
4.有鉴于此,本发明的目的是提供一种24ghz毫米波雷达安检仪成像方法。该方法利用希尔伯特变换、布莱克曼窗、信号序列补零、空间匹配滤波等技术手段,能够有效地解决上述窄带宽导致的分辨率问题,即使信号在观察窗内小于一个完整周期,也能得到精确的频率信息和相位信息。
5.实现本发明目的所采用的具体技术方案是:
6.一种24ghz毫米波雷达安检仪成像方法,包括下述步骤:
7.s1:利用雷达发出的调频连续波,与经过目标物体上坐标(0,0)处点的反射回波作混频,经过低通滤波后会产生i、q两路信号,模数转换器(adc)采样i路信号作为数字域的中频信号;
8.s2:将s1所述的数字域中频信号,经过希尔伯特变换,从而得到对应的复数信号;该过程可以适用于采样信号不满足一个完整周期的情况,并使其经傅里叶变换后的频谱分量更接近于实际的频率;
9.s3:将s2所述的复数信号经过布莱克曼窗,从而得到信号序列,该过程可以改善极值处的频谱,优化频谱旁瓣分量,减小周期性旁瓣对主瓣的叠加影响;
10.s4:对s3所述的信号序列进行补零,并经过快速傅里叶变换(fft),从而得到目标物体上某个点的预处理数据,获取到了该点处精准的频率信息和相位信息;
11.s5:从坐标(0,0)处开始,按从左至右、从上到下顺序,扫描目标物体上的各个点,并依次经过上述s1~s4的处理,得到目标物体上各个点的预处理数据;
12.s6:将s5所述的预处理数据经过平面二维离散傅里叶变换,从而得到频域信息;
13.s7:将s6所述的频域信息经过空间匹配滤波器作相位偏差补偿,最后经过二维平面离散傅里叶逆变换,从而得到成像结果。
14.进一步地,步骤s1中,所述i、q两路信号,具体表示为:
[0015][0016][0017]
其中,f0为中心频率,α为调频带宽b和啁啾扫频时间tc的比值,也叫扫频斜率,a为幅度,t为采样时间,τ为回波的飞行时间,fb为携带着距离信息的中频信号。
[0018]
进一步地,步骤s2中,所述复数信号为经希尔伯特变换构造出复数域的解析信号:
[0019]
r(t)=bi(t)+jh[bi(t)]=exp[j2π(fbt+f0τ)]
[0020]
其中,j是虚数单位,h[bi(t)]表示对信号进行希尔伯特变换。
[0021]
进一步地,步骤s7中,所述成像结果为:
[0022]
f(x,y)=ft
2d-1
{ft
2d
[s(x,y)]ft
2d
[h(x,y)]}
[0023]
其中,f(x,y)表示重建目标的反射分布,s(x,y)表示目标物体预处理数据,ft
2d-1
和ft
2d
分别表示二维离散逆傅里叶变换和二维离散傅里叶变换,(x,y)表示目标物体上各点的坐标,z0表示目标物体距离,kz表示在z轴上电磁波波数,h(x,y)是匹配滤波器的冲激响应,表达式为:
[0024][0025]
其中,j是虚数单位。k为波数。
[0026]
经由上述的技术方案可知,与现有技术相比,本发明可以对fmcw雷达最小分辨距离范围内的物体成像,经算法流程可以使得成像系统达到理论的最佳分辨率,使毫米波成像技术可以应用于低成本24ghz频段的fmcw雷达。
附图说明
[0027]
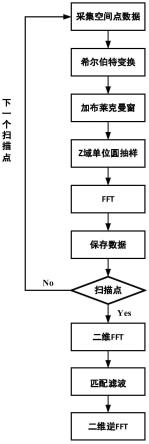
图1为本发明24ghz毫米波雷达安检仪成像方法的流程图;
[0028]
图2为本发明实施例成像系统示意图;
[0029]
图3为本发明实施例中目标物体示意图;
[0030]
图4为发明实施例的成像结果示意图。
具体实施方式
[0031]
下面将结合附图及实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0032]
参见图1,本发明的一种24ghz毫米波雷达安检仪成像方法,具体包括:
[0033]
s1:利用雷达发出的调频连续波,与经过目标物体上坐标(0,0)处点的反射回波作混频,并经过adc采样,从而得到数字域的中频信号;
[0034]
s2:将s1所述的数字域中频信号,经过希尔伯特变换,从而得到对应的复数信号,该过程可以适用于采样信号不满足一个完整周期的情况,并使其经傅里叶变换后的频谱分量更接近于实际的频率;
[0035]
s3:将s2所述的中频信号经过布莱克曼窗,从而得到信号序列,该过程可以改善极值处的频谱,优化频谱旁瓣分量,减小周期性旁瓣对主瓣的叠加影响;
[0036]
s4:对s3所述的信号序列进行补零,并经过fft,从而得到目标物体上某个点的预处理数据,获取到了该点处精准的频率信息和相位信息;
[0037]
s5:从坐标(0,0)处开始,按从左至右、从上到下顺序,扫描目标物体上的各个点,并依次经过上述s1~s4的处理,得到目标物体上各个点的预处理数据;
[0038]
s6:将s5所述的预处理数据经过平面二维离散傅里叶变换,从而得到频域信息;
[0039]
s7:将s6所述的频域信息经过空间匹配滤波器作相位偏差补偿,最后经过二维平面离散傅里叶逆变换,从而得到成像结果。
[0040]
实施例
[0041]
下面通过具体的应用实例对上述方法做具体说明。
[0042]
参见图2,本实施例公开一种24ghz毫米波雷达安检仪成像系统,包括24ghz调频连续波雷达、二维扫描平台、控制器以及计算机;其中,二维扫描平台采用垂直水平的丝杆移动平台组合,通过57步进电机来控制扫描;其中,将雷达通过串口与matlab软件接口相连,捕获图像和图像重建。
[0043]
参见图3,本实施例中目标对象是一把金属部分长约12厘米的匕首图(a)所示,通过牛皮纸的遮挡,将金属匕首隐藏图(b)所示。目标对象距离成像系统20cm。
[0044]
下面基于上述的一种24ghz毫米波雷达安检仪成像系统对本发明的方法做具体说明。
[0045]
步骤1:毫米波雷达射频前端以中心频率为24ghz,扫频带宽为200mhz发射调频连续波;
[0046]
步骤2:使用毫米波雷达射频前端接收天线接收调频连续波经过目标物体上坐标(0,0)处点的反射回波;
[0047]
步骤3:使用雷达射频前端的一根发射天线以及一根接收天线的信号数据,对二者进行混频,并经过adc采样、希尔伯特变换、布莱克曼窗、补零、fft等一系列信号处理方法,得到目标物体上坐标(0,0)处点的预处理数据;
[0048]
步骤4:雷达沿二维平台移动,对目标物体按从左至右,从上到下的采样顺序进行扫描,经过上述步骤3的处理,得到目标物体上各个点的预处理数据。水平轴采样间距12毫米,垂直轴15毫米。合成孔径在水平和垂直扫描方向的长度为195*156mm。
[0049]
步骤5:将所得目标物体上各个点的预处理数据进行平面二维离散傅里叶变换、空间补偿滤波器以及二维平面离散傅里叶逆变换处理,得到目标物体成像结果。
[0050]
参见图4,采用商用低成本毫米波雷达作为成像设备,成功通过二维近场成像系统结合本方法,对隐藏金属匕首进行成像,成像长度为13cm*4cm,分辨率已远超越理论的
2.6cm。可见,采用本方法使原本只能应用在大带宽77ghz雷达的成像系统可以应用在低成本24ghz雷达上。
[0051]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1