一种旋转机械振动故障诊断方法及其系统与流程
1.本技术涉及数字处理技术领域,特别涉及一种基于去趋势波动分析的旋转机械振动故障诊断方法及其系统。
背景技术:
2.设备的振动信息能够反映设备的运行状态。现有的设备健康状态评估与故障诊断方法主要包括:第一类基于信号分析和处理技术的故障诊断方法,其中包括傅里叶变换、短时傅里叶变换、小波变换、经验模态分解等。第二类基于模型的机械故障诊断方法,其中包括时间序列模型、隐马尔可夫模型、协整理论模型等。第三类的基于大数据和人工智能的故障诊断方法、其中包括神经网络、支持向量机等。第一类和第二类的故障诊断方法都要求系统是稳态的线性系统并从振动信号中提取出能够反应设备运行状态的特征值,但此类方法的理论基础决定了只能适用于平稳的线性的振动信号;第三类方法需要大量的历史数据和较高的算力才能得到可靠的诊断结果。
3.机械设备的工作环境通常比较复杂,一般存在多个振源,在干扰信号较多的背景下测量得到的振动信号多表现出非平稳性,因而在实际工程应用中以上三类方法表现出缺乏时间和频率同时定位功能、处理非平稳信号时的局限性和分辨率上的局限性等缺点。
4.基于以上的分析需要建立针对非线性系统且算力适合用于边缘存储和计算分析的机械故障诊断方法。
技术实现要素:
5.本技术提供一种旋转机械振动故障诊断方法,包括:
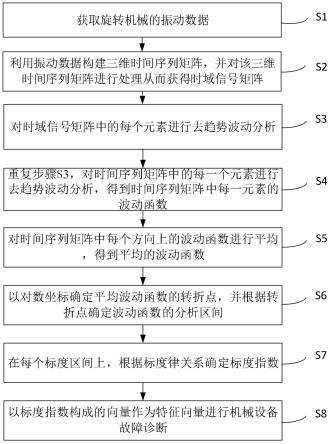
6.步骤s1、获取旋转机械的振动数据;
7.步骤s2、利用振动数据构建时间序列矩阵,并对该时间序列矩阵进行处理从而获得时域信号矩阵;
8.步骤s3、对时域信号矩阵中的每个元素进行去趋势波动分析,得到时间序列矩阵中每一元素的波动函数,对时间序列矩阵中每个方向上的波动函数进行平均,得到平均波动函数;
9.步骤s4、以对数坐标确定平均波动函数的转折点,并根据转折点确定波动函数的标度区间,在每个标度区间上,根据标度律关系确定标度指数;
10.步骤s5、以标度指数构成的向量作为特征向量进行旋转机械振动故障诊断。
11.如上所述的一种旋转机械振动故障诊断方法及其系统,其中,通过传感器对需要进行故障诊断的旋转机械进行数据采集,获得振动数据,并将数据上传至处理器;其中,振动数据包括来自旋转机械的三个方向的振动信号。
12.如上所述的一种旋转机械振动故障诊断方法,其中,步骤s2具体包括如下子步骤:
13.利用振动数据构建时间序列矩阵;
14.对时间序列矩阵进行分割,获取所有方向的时间子序列矩阵;
15.利用所有方向的时间子序列矩阵构成时域信号矩阵。
16.如上所述的一种旋转机械振动故障诊断方法及其系统,其中,利用窗函数对时间序列矩阵x
i,j
(t)中的任一维变量进行分割,得到在时间尺度τ下的k个子序列。
17.如上所述的一种旋转机械振动故障诊断方法,其中,步骤s3具体包括如下子步骤:
18.构建去均值的累积求和序列;
19.将累积求和序列按照长度n进行等分;
20.分段拟合各段数据的多项式趋势ln(i);
21.根据多项式趋势ln(i)和累积求和序列的子段计算时间序列的均方根波动函数;
22.改变尺度n的大小,重复上述步骤。
23.如上所述的一种旋转机械振动故障诊断方法,其中,采用最小二乘法拟合各段数据的多项式趋势。
24.如上所述的一种旋转机械振动故障诊断方法,其中,针对累积求和序列的每一个子序列,根据均方根波动函数计算公式,计算累积求和序列子段的均方根波动函数。
25.如上所述的一种旋转机械振动故障诊断方法,其中,对平均波动函数两端同时取对数,并求该离散函数在不同点处的梯度值,以梯度值变化百分比大于平均梯度为标准,确定波动函数的标度。
26.本发明还提供一种基于去趋势波动分析的旋转机械振动故障诊断系统,包括:旋转机械、传感器以及处理器;
27.其中,所述传感器:用于采集所述旋转机械的振动数据,并将采集的振动数据上传至所述处理器进行处理;所述振动数据包括来自旋转机械的三个方向的振动信号;
28.所述处理器:用于接收所述振动数据,并执行上述任意一项所述的基于去趋势波动分析的旋转机械振动故障诊断方法,对数据进行处理,得出诊断结果。
29.采用本技术提供的一种基于去趋势波动分析的旋转机械振动故障诊断方法及其系统,能够处理振动设备产生的微弱或非平稳故障特征信号,且能够适用于不同的采样时刻、样本大小和采样频率等不同领域,给出设备的故障特征,实现机械故障在定性和定量两方面的精准判断的技术效果。
附图说明
30.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
31.图1为基于去趋势波动分析的旋转机械振动故障诊断方法流程图;
32.图2为基于去趋势波动分析的旋转机械振动故障诊断方法的一种实施例的标度曲线。
33.图3为基于去趋势波动分析的旋转机械振动故障诊断方法的另一种实施例的不同故障标度图。
具体实施方式
34.下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.本技术提供一种基于去趋势波动分析的旋转机械振动故障诊断方法及其系统,能够处理振动设备产生的微弱或非平稳故障特征信号,且能够适用于不同的采样时刻、样本大小和采样频率等不同领域,不仅给出设备的故障特征而且能够对其进行量化估计,还能实现机械故障在定性和定量两方面的精准判断。
36.本技术提供一种基于去趋势波动分析的旋转机械故障诊断系统,包括:旋转机械、传感器以及处理器;
37.其中,传感器:用于采集旋转机械的振动数据,并将采集的振动数据上传至处理器进行处理;该振动数据包括来自旋转机械的三个方向的振动信号。
38.处理器:用于接收传感器上传的振动数据,并执行下述的基于去趋势波动分析的旋转机械振动故障诊断方法,对振动数据进行处理,得出诊断结果。
39.为达到上述目的,如图1所示,本技术提供一种基于去趋势波动分析的旋转机械故障诊断方法,包括如下步骤:
40.步骤s1:获取旋转机械的振动数据。
41.具体的,通过传感器对需要进行故障诊断的旋转机械进行数据采集,获得振动数据,并将数据上传至处理器。其中,振动数据包括来自旋转机械的三个方向的振动信号。
42.步骤s2:利用振动数据构建时间序列矩阵,并对该时间序列矩阵进行处理从而获得时域信号矩阵;
43.本技术实施例中,构建的时间序列矩阵可以为任意维度矩阵,例如三维时间序列矩阵,但不仅限于三维时间序列矩阵。
44.具体地,步骤s2具体包括如下子步骤:
45.s21:利用振动数据构建时间序列矩阵。
46.具体的,处理器接收到传感器上传的振动数据后,分别以振动数据中的每个方向的振动信号构建一维变量,并利用构建的所有一维变量构建三维时间序列矩阵。
47.具体的,以三维时间序列矩阵为例,三维时间序列矩阵的表达式如下:
[0048][0049]
其中,x
i,j
(t)为三维时间序列矩阵;i表示传感器测量的方向,取值范围为i=h,v,s,其中i=h表示旋转机械的水平方向dh,i=v表示旋转机械的切向方向dv,i=s表示旋转机械的轴向方向ds;n为正整数,表示总采样次数;j表示任意一个采样数据;t表示时域。
[0050]
s22:对时间序列矩阵进行分割,获取所有方向的时间子序列矩阵。
[0051]
具体的,利用窗函数对三维时间序列矩阵x
i,j
(t)中的任一维变量进行分割,得到在时间尺度τ下的k个子序列,其中,矩形窗函数的具体表达式如下:
[0052][0053]
其中,wu(l)为任意矩形窗函数,u为子序列的索引,为自然数,取值范围为u=1,2,3,...,k;τ为时间尺度;k为子序列的个数;l为[0,n]的自然数。
[0054]
具体的,子序列矩阵的具体表达式如下:
[0055][0056]
其中,y
m(t)
为子序列矩阵的表达式;表示任意子序列;为当u=k时的子序列;m是振动信号的方向编号,m的取值为m=1,2,3,其中m=h表示旋转机械的水平方向dh的振动信号;其中m=v表示旋转机械的切向方向dv的振动信号,m=s表示旋转机械的轴向方向ds的振动信号;k为子序列的个数;t表示时域。
[0057]
其中,任意子序列的表达式如下:
[0058][0059]
其中,x
m,(u-1)τ+n
为任意子序列中的任意元素;x
m,uτ
为n=τ时的元素;n为自然数,其取值范围为n=1,2,3,...,τ。
[0060]
s23:利用所有方向的时间子序列矩阵构成时域信号矩阵。
[0061]
重复子步骤s22,得到所有方向的时间子序列矩阵,利用所有方向的时间子序列矩阵构成时域信号矩阵,具体表达式如下:
[0062][0063]
其中,y(t)为时域信号矩阵;t表示时域;u为子序列的索引,取值范围为u=1,2,3,...,k;k为子序列的个数。
[0064]
步骤s3:对时域信号矩阵中的每个元素进行去趋势波动分析;
[0065]
具体地,步骤s3包括如下子步骤:
[0066]
s31:构建去均值的累积求和序列。
[0067]
具体的,按照去均值的累积求和公式计算时域信号矩阵中的每一个元素的累积求和序列。
[0068][0069]
其中,利用获取均值的表达式分别计算时域信号矩阵y(t)中的每个元的均值,得到时域信号矩阵中每一个元素的均值。获取均值的表达式如下:
[0070][0071]
其中,x(i)为振动信号幅值;n为该段时域信号数量,i为振动信号的序列索引。
[0072]
s32:将累积求和序列按照长度n进行等分,累积求和序列的每一段表示为其中k=1,2,...,k;i=1,2,...,n。
[0073]
具体的,根据序列的长度n,对序列进行k等分,每一份的数据的长度为n,每一段表示为
[0074]
s33:采用最小二乘法分别拟合各段数据的多项式趋势ln(i)。
[0075]
具体的,假设拟合的多项式的阶数为m,则多项式的表达式为:
[0076][0077]
根据最小二乘法确定方程中的各个系数aq大小,并根据下式计算数据对应的多项式趋势ln(i):
[0078][0079]
s34:根据多项式趋势ln(i)和累积求和序列的子段计算时间序列的均方根波动函数:
[0080]
具体的,针对累积求和序列的每一个子序列,根据均方根波动函数计算公式,计算累积求和序列子段的均方根波动函数f(n);
[0081]
其中均方根波动函数计算公式为:
[0082][0083]
s35:改变尺度n的大小,重复步骤s32到s34。
[0084]
具体的,n的变化范围从为20,21,23,...,重复步骤s32到s34,可以得到不同的n值下的f(n)大小。
[0085]
返回参见图1,步骤s4:重复步骤s3,对时间序列矩阵中的每一个元素进行去趋势波动分析,得到时间序列矩阵中每一元素的波动函数fk(n);
[0086]
步骤s5:对时间序列矩阵中每个方向上的波动函数fk(n)进行平均,得到平均的波动函数:
[0087]
具体的,按照平均波动函数计算公式,计算每个方向上的平均波动函数:
[0088][0089]
步骤s6:以对数坐标确定平均波动函数的转折点,并根据转折点确定波动函数的分析区间。
[0090]
具体的,对平均波动函数两端同时取对数,并求该离散函数在不同点处的梯度值,以梯度值变化百分比大于平均梯度为标准,确定波动函数的标度。
[0091]
步骤s7:在每个标度区间上,根据标度律关系确定标度指数α。
[0092]
具体的,平均波动函数和尺度n在某个区间范围内存在标度律关系式:
[0093][0094]
根据该关系式(12)并结合步骤s6中确定的标度区间,计算标度指数α;
[0095]
s8:以标度指数α构成的向量作为特征向量进行机械设备故障诊断。
[0096]
具体的,以标度指标α为特征向量,根据不同状态下特征向量的欧式距离之间的变化或者其他线性分类的的方法,判断机械设备是否发生故障。
[0097]
本技术具有能够处理振动设备产生的微弱或非平稳故障特征信号,且能够适用于不同的采样时刻、样本大小和采样频率等不同领域,不仅给出设备的故障特征而且能够对其进行量化估计,实现机械故障在定性和定量两方面的精准判断的技术效果。
[0098]
尽管已描述了本技术的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,本技术的保护范围意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术保护范围及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1