基于共成像点道集的智能化绕射波分离方法
1.本发明涉及勘探地球物理技术领域,尤其涉及一种基于共成像点道集的智能化绕射波分离方法。
背景技术:
2.反射波与绕射波是地震勘探中的两种典型的地震响应。反射波源自地下平滑连续界面,是当前地震反演及成像的主要目标;绕射波源自地下小尺度不连续地质构造及不规则地质体(断层、裂缝、缝洞等),携带地震高分辨率信息。随着油气田勘探开发的需求,常规的将反射波作为主要研究对象的勘探方法已经无法满足精度要求,而绕射波成像具有探测小尺度地质体的能力。因此,充分利用地震资料中的绕射波响应,实现绕射波单独成像,这对于提高小尺度不连续构造的地震成像分辨率以及复杂构造条件下的高精度地震解释意义重大。然而地震资料中的绕射波能量往往淹没在能量相对较强的反射信息中。
3.在地震数据处理流程中,携带地下高分辨信息的弱振幅绕射波往往被视为噪音被滤除或压制,致使地下小尺度非连续及非均质地质体成像分辨率低。常用的解决办法是根据反射波和绕射波在叠前地震道集和偏移过程中的特征差异进行提取和分离。在叠前道集提取绕射波的方法存在需要高信噪比原始地震数据,计算效率低等问题。在偏移过程中可以通过改进偏移算子实现绕射波成像,但是常规波动方程偏移存在传播能量几何扩散损失,深层区域照明不足,需要高覆盖次数地震数据等缺点。也可以从偏移过程中提取各类道集,通过识别反射波稳相顶点附近能量进行反射波压制实现绕射波提取,但是这类波场分离方法的效果很大程度上取决于反射波切除半径。来自地下小尺度不连续地质体的绕射波响应很难从地震数据中有效提取和分离,从而大大的降低了绕射目标体的成像精度和分辨率。
4.因此,亟需研究一种绕射波分离及提取方法,解决地震记录中较弱能量绕射波被强反射响应覆盖,难以实现绕射波分离和小尺度地质体高精度成像问题,以实现绕射波对地下断层、尖灭等小尺度构造的高分辨率地震成像,来满足当前对构造及岩性油气藏的精细勘探。
技术实现要素:
5.为解决上述技术问题,本发明公开了一种基于共成像点道集的智能化绕射波分离方法。本发明首先基于预设的散射点速度模型通过全波场正演模拟和高斯束共成像点道集偏移计算只包含反射波和既包含反射波也包含散射波的共成像点道集,然后将反射波共成像点道集作为深度神经网络的输入,将既包含反射波也包含散射波的成像道集作为智能化网络的输出,使用合成的训练数据集训练神经网络结构,利用反射波和绕射波响应在共成像点道集上明显的几何特征差异,将具有稳相顶点的呈现“笑脸”形状的反射波特征提取出来,最后使用自适应相减计算绕射波共成像点道集和成像剖面,最终获得绕射目标体高分辨率成像结果。
6.为实现上述目的,本发明采用下述技术方案:
7.根据本发明实施例的第一方面,提出了一种基于共成像点道集的智能化绕射波分离方法。
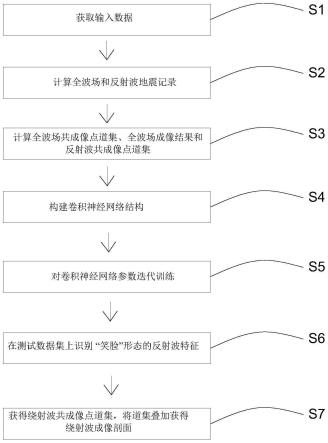
8.在一个实施例中,基于共成像点道集的智能化绕射波分离方法,包括以下步骤:
9.s1:获取输入数据;
10.s2:利用输入数据计算全波场和反射波地震记录;
11.s3:计算全波场共成像点道集、全波场成像结果和反射波共成像点道集;
12.s4:构建4层卷积神经网络结构;
13.s5:利用步骤s3生成的训练数据集对步骤s4构建的卷积神经网络参数进行迭代训练;
14.s6:在测试数据集上应用步骤s5训练好的神经网络,识别“笑脸”形态的反射波特征;
15.s7:利用自适应相减方法获得绕射波共成像点道集,将道集叠加获得绕射波成像剖面。
16.可选地,步骤s1中,所述输入数据包括:包含和不包含散射点的速度模型、平滑偏移速度模型、震源函数和地震子波。
17.可选地,步骤s2中,所述利用输入数据计算全波场和反射波地震记录包括,使用包含和不包含散射点的速度模型、震源函数和地震子波,通过求解声介质波动方程计算全波场和反射波地震记录,所述声波波动方程为:
[0018][0019]
其中,v为纵波传播速度,p为压强,f为震源函数,表示时间二次导数,为拉普拉斯算子。
[0020]
可选地,步骤s3中,利用全波场地震记录和平滑速度模型通过偏移算法计算全波场共成像点道集和全波场成像结果,利用反射波地震记录和平滑速度模型通过偏移算法计算反射波共成像点道集,所述偏移算法为:
[0021][0022]
其中,i(x;xs;θ)为成像结果,xr代表检波点位置,xs为震源位置,x为成像点位置,θ为入射角,p(xr;xs;t)为压强记录,τ为双程旅行时,w(xr;x;xs;θ)为偏移成像加权系数。
[0023]
可选地,步骤s5中,迭代训练时,将包含反射波和绕射波响应的全波场倾角域共成像点道集作为神经网络输入,将仅包含反射波响应的倾角域共成像点道集作为神经网络输出。
[0024]
可选地,所述自适应相减方法为,从全波场倾角域道集中自适应减去神经网络预测出来的反射波道集。
[0025]
根据本发明实施例的第二方面,提出了一种电子设备。
[0026]
在一个实施例中,电子设备包括存储器、处理器及存储在存储器上并可在处理器
上运行的程序,其特征在于,所述处理器执行所述程序时实现上述任一项方法的步骤。
[0027]
根据本发明实施例的第三方面,提出了一种计算机可读存储介质。
[0028]
在一个实施例中,所述计算机可读存储介质存储有执行上述任一项方法的程序。
[0029]
本发明的有益效果是,
[0030]
1、本发明可以将来自地下小尺度地质构造并且被反射波能量淹没的绕射波成功分离出来,最终获得高精度绕射体成像结果。
[0031]
2、本专利依据绕射波和反射波响应在倾角共成像点道集中的几何特征差异应用卷积神经网络进行绕射波分离,摒弃了传统方法为了保证绕射波分离成功,而去分析反射波和绕射波在不同地震道集中的运动学和动力学特征的区别。
[0032]
3、本发明首先应用加入人工散射点和未加入人工散射点的速度模型计算全波场和反射波倾角域共成像点道集,然后利用两种道集分别作为神经网络的输入和输出训练神经网络参数,使网络在训练过程中成功识别“笑脸”形状的具有稳相顶点的反射波特征,最后将训练好的网络应用于测试工区。与传统基于顶点切除的绕射波分离方法相比,本发明可以识别反射波稳相顶点附近更大横向范围的波形特征,并且反射波特征识别半径可以很好的适应地下复杂构造。虽然神经网络在训练过程耗费数个小时,但捕捉到反射波几何特征的神经网络在应用过程中仅仅需要几秒。
[0033]
4、本发明进一步应用自适应相减方法计算绕射波道集和成像结果,最终获得高信噪比的绕射波倾角域共成像点道集和高精度地下小尺度地质体成像剖面,在保证计算效率的同时提高了绕射目标体的成像分辨率。
附图说明
[0034]
图1为本发明一实施例示出的一种基于共成像点道集的智能化绕射波分离方法的流程图;
[0035]
图2为本发明一实施例示出的用于绕射波分离的端对端卷积神经网络结构;
[0036]
图3为本发明一实施例示出的包含散射点速度模型;
[0037]
图4为本发明一实施例示出的不包含散射点的速度模型;
[0038]
图5为本发明一实施例示出的偏移速度模型;
[0039]
图6为本发明一实施例示出的全波场共成像点道集和反射波共成像点道集;
[0040]
图7为本发明一实施例示出的预测的反射波道集和自适应相减的道集;
[0041]
图8为本发明一实施例示出的全波场成像结果图;
[0042]
图9为本发明一实施例示出的反射波成像结果图;
[0043]
图10为本发明一实施例示出的散射波成像结果图。
具体实施方式
[0044]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0045]
实施例1
[0046]
图1示出了一种基于共成像点道集的智能化绕射波分离方法的流程。
[0047]
在该实施例中,基于共成像点道集的智能化绕射波分离方法,包括以下步骤:
[0048]
s1:获取输入数据;
[0049]
s2:利用输入数据计算全波场和反射波地震记录;
[0050]
s3:计算全波场共成像点道集、全波场成像结果和反射波共成像点道集;
[0051]
s4:构建卷积神经网络结构;
[0052]
s5:利用步骤s3生成的训练数据集对步骤s4构建的卷积神经网络参数进行迭代训练;
[0053]
s6:在测试数据集上应用步骤s5训练好的神经网络,识别“笑脸”形态的反射波特征;
[0054]
s7:利用自适应相减方法获得绕射波共成像点道集,将道集叠加获得绕射波成像剖面。
[0055]
可选地,步骤s1中,所述输入数据包括:包含和不包含散射点的速度模型、平滑偏移速度模型、震源函数和地震子波。图3示出了包含散射点速度模型,图4示出了不包含散射点的速度模型,图5示出了偏移速度模型。
[0056]
可选地,步骤s2中,所述利用输入数据计算全波场和反射波地震记录包括,使用包含和不包含散射点的速度模型、震源函数和地震子波,通过求解声介质波动方程计算全波场和反射波地震记录,所述声波波动方程为:
[0057][0058]
其中,v为纵波传播速度,p为压强,f为震源函数,表示时间二次导数,为拉普拉斯算子。
[0059]
图6示出了全波场共成像点道集和反射波共成像点道集。
[0060]
可选地,步骤s3中,利用全波场地震记录和平滑速度模型通过偏移算法计算全波场共成像点道集和全波场成像结果,利用反射波地震记录和平滑速度模型通过偏移算法计算反射波共成像点道集,所述偏移算法为:
[0061][0062]
其中,i(x;xs;θ)为成像结果,xr代表检波点位置,xs为震源位置,x为成像点位置,θ为入射角,p(xr;xs;t)为压强记录,τ为双程旅行时,w(xr;x;xs;θ)为偏移成像加权系数。
[0063]
图2示出了用于绕射波分离的端对端卷积神经网络结构。
[0064]
在该实施例中,步骤s4中,所述卷积神经网络结构为4层。
[0065]
可选地,步骤s5中,迭代训练时,将包含反射波和绕射波响应的全波场倾角域共成像点道集作为神经网络输入,将仅包含反射波响应的倾角域共成像点道集作为神经网络输出。
[0066]
图7示出了神经网络预测的反射波倾角域道集和从全波场道集自适应减去网络预测反射波道集得到的绕射波倾角域道集,可以看出,呈现“笑脸”形状的具有稳相顶点的反
射波响应被卷积神经网络清晰识别,并且自适应相减之后的道集中反射波能量得到最大程度的压制,同时绕射波能量被完好的保留下来。
[0067]
图8示出了全波场成像结果图,图9示出了反射波成像结果图,图10示出了散射波成像结果图。
[0068]
在该实施例中,所述自适应相减方法为,从全波场倾角域道集中自适应减去神经网络预测出来的反射波道集。从图10可以看出,来自地下连续地层的反射波能量被压制,振幅较弱的来自地下不连续小尺度的绕射波保留下来,最终获得地下小尺度不连续地质体高精度成像结果。
[0069]
实施例2
[0070]
本实施例公开了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现图1的步骤。
[0071]
实施例3
[0072]
本实施例公开了一种计算机可读存储介质,所述计算机可读存储介质存储有执行图1所示步骤的程序。
[0073]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的程序产品的形式。
[0074]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过程序来指令相关的硬件来完成,所述的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)或随机存储记忆体(random accessmemory,ram)等。
[0075]
当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1