适用于跨海空介质的捷联式惯性导航系统的初始对准方法
1.本发明属于惯性导航技术领域,具体涉及适用于跨海空介质的捷联式惯性导航系统的初始对准方法。
背景技术:
2.惯性导航器件工作初始时刻需要对惯性器件进行初始对准,由高精度测量元件对惯性器件进行速度、位置信息修正。在船舶和航空所用的惯导器件虽然原理相同、作用相似,但是在实际工作中二者在数据处理上以及性能指标上有很大的区别。船用惯性导航器件——光纤罗经以及航空惯导器件——机载导航系统,二者不能实现互换,例如:传统的光纤罗经(船用惯性导航器件)在航空飞机上,由于较大的机动使得适用效果较差。而传统机载惯导又不适应海浪引起的“晃动”环境,从而初始对准误差较大。
3.目前,随着极地作业所要求的难度上升、水路两栖飞机的兴起,迫切的需求一种既能够在海上船舶工作,也能够在天空飞机工作的惯性导航装置,与之相对应的需要一种捷联惯性导航算法来进行工作。同时,由于船用惯性惯导器件初始对准时间和机用惯性导航初始对准时间要求不同;在不同的对准时间内,达到不同使用要求的精度是提高适用性的重点。
技术实现要素:
4.为解决传统的卡尔曼滤波速度慢,跨介质惯导对准性能差等问题;本发明的目的在于提供适用于跨海空介质的捷联式惯性导航系统的初始对准方法,能够实现即适用与海面环境对准又适用于高机动的航空环境的跨介质对准算法。实现5分钟内粗对准,1小时内达到经对准指标;5分钟后航向精度就可以满足需求指标。
5.本发明,适用于跨海空介质的捷联式惯性导航系统的初始对准方法,方法包括:
6.采用惯性测量元件输出的角速度和加速度信息并加以计算得到速度和位置信息,同时通过卫导提供的速度和位置信息来反馈到惯导系统,估计惯导系统相关参数的误差,从而提高导航精度;通过相关算法对之前得出的初始对准模型进行估测,尽可能降低系统状态协方矩阵的维数、优化系统矩阵;采用卡尔曼滤波对部分误差进行估计的同时,采用对初始对准时期反馈的数据进行反复利用的迭代估计,迭代估计也同时对系统的状态协方矩阵进行优化。
7.适用于跨海空介质的捷联式惯性导航系统的初始对准方法,具体包括以下步骤:
8.步骤一:利用采集的高精度初始对准数据建立惯导系统的初始对准,模型:
[0009][0010]
取地理坐标系t系;分别为地理坐标系的东、北、方位姿态角误差。δve、δvn、δvu为地理系的东、北、天方向上的速度误差,δl、δλ为经、维误差,ε
x
、εy、εz为惯性测量器件的陀螺漂移,为加速度计零偏,且陀螺漂移、加速度计零偏为常值误差;
[0011]
初始对准的状态方程为:
[0012][0013]
其中a表示14x14维的状态系数矩阵,g表示组合导航系统的噪声状态系数矩阵,w表示组合导航系统系统噪声矢量;
[0014]
步骤二:对高精度导航装置与惯性导航元件数据融合后得到量测方程,得到速度和位置有关信息的矩阵z;
[0015]
z=hx+η
[0016]
其中z:
[0017]
z=[δl δλ δv
e δv
n ]
t
[0018]
h为量测矩阵,η为量测噪声;
[0019]
步骤三:采用卡尔曼滤波所用的初始对准模型来进行估计,调整系统协方差矩阵的维数,优化系统的状态方程,对模型的估测如下:
[0020]
xk=φ
k∣k-1
x
k-1
+γ
k∣k-1wk-1
[0021]
zk=hkxk+vk[0022]
其中x
k-1
、w
k-1
为上一时刻已知的状态向量;φ
k∣k-1
、γ
k∣k-1
和hk为系统结构参数;xk、zk为此刻的状态和量测方程;对上述状态观测方程采用卡尔曼法进行迭代更新,能够对模型进行误差估计:
[0023]
由上一时刻的状态求取下一时刻的状态:
[0024]
x
k|k-1
=φ
k∣k-1
x
k-1
[0025]
求取下一时刻的状态预测协方差矩阵:
[0026][0027]
求取卡尔曼滤波增益:
[0028][0029]
进行状态估计:
[0030]
xk=x
k∣k-1
+kk(z
k-hkx
k∣k-1
)
[0031]
系统的状态协方差矩阵为:
[0032]
pk=(i-k
khk
)p
k|k-1
[0033]
对初始系统的状态协方差矩阵p0进行设计,降低系统的状态协方差矩阵的维数;
[0034]
步骤四:对数据进行反复的迭代处理,包括:及时调整系统的状态协方差矩阵p0的维数,对加速度计的零偏进行迭代估计,形成加速度计闭环回路,使加速度计的零偏能够降低;对陀螺仪零偏进行迭代估计,同样使陀螺仪零偏能够降低;之后进行进一步迭代估计,要求此次迭代估计能够使陀螺仪和加速度计的零偏误差降低对准前的加速度计、陀螺仪的零偏误差的二分之一。
[0035]
与现有技术相比,本发明的有益效果为:
[0036]
提供了船用——机用的捷联式惯性导航系统的初始对准方法,该方法从调整协方差的角度实现了状态误差矩阵的优化与改善;对状态方程进行降维处理同时对传统误差方程收敛慢缺点进行改善,极大的提高了系统的误差精度以及改善了初始对准的精度和时间。
附图说明
[0037]
为了易于说明,本发明由下述的具体实施及附图作以详细描述。
[0038]
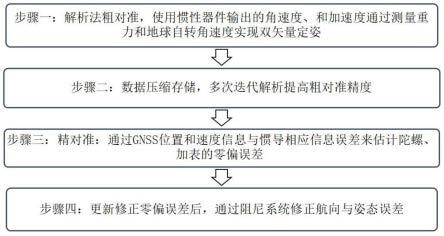
图1为本发明的流程图。
具体实施方式
[0039]
为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本发明。但是应该理解,这些描述只是示例性的,而并非要限制本发明的范围。本说明书附图所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
[0040]
在此,还需要说明的是,为了避免因不必要的细节而模糊了本发明,在附图中仅仅示出了与根据本发明的方案密切相关的结构和/或处理步骤,而省略了与本发明关系不大的其他细节。
[0041]
本具体实施方式采用以下技术方案:由于采用卡尔曼滤波会造成惯性器件收敛性慢的问题,本次发明采用优化状态协方差矩阵来改善系统的初始对准模型,提高系统的对准精度,减少对准时间;同时,结合高精度传感器件确保惯性导航系统能够在长时间内保持高精度的工作。
[0042]
实施例一:一种适用于跨海空介质的捷联式惯性导航系统的初始对准方法,具体流程如图1所示,基于船舶、飞机捷联惯导系统的误差传播规律以及外部高精度传感器所提供的初始信息,构造船舶、飞机捷联惯导系统的初始对准模型;利用卡尔曼滤波的方法对该模型进行估计,调整系统的状态协防矩阵的维度,对对准模型的部分误差量进行迭代估计;在迭代估计完成后,及时调整系统的状态协防矩阵,优化系统的状态协防矩阵进行进一步的迭代估计。
[0043]
本具体实施方式提供了一种基于船舶、飞机的捷联式惯性导航系统、采用基于状态矩阵调整的初始对准方法;由陀螺仪和加速度计采集出的角速度和加速度信息,通过卡尔曼滤波实现捷联惯导的初始对准,实现了惯导系统的高精度对准。具体由惯性器件和高精度传感器产生的系统状态量——速度误差、位置误差、陀螺仪和加速度计零偏采取卡尔曼滤波的方式对状态方程进行调整,具体可以通过对状态方程进行降维进行处理,之后对状态量进行进一步的迭代,加快滤波的过程,降低系统的误差。
[0044]
实施例二:一种适用于跨海空介质的捷联式惯性导航系统的初始对准方法,具体包括以下步骤:
[0045]
步骤一:对于船舶、飞机的惯性导航的误差量的传播规律以及其他高精度传感器提供的信息建立船舶、飞机的初始对准模型。
[0046]
对于初始对准模型可以表示为:
[0047][0048]
取地理坐标系t系;分别为地理坐标系的东、北、方位姿态角误差。δve、
δvn、δvu为地理系的东、北、天方向上的速度误差,δl、δλ为经、维误差,ε
x
、εy、εz为惯性测量器件的陀螺漂移,为加速度计零偏,且陀螺漂移、加速度计零偏为常值误差。
[0049]
初始对准的状态方程为:
[0050][0051]
其中a表示14x14维的状态系数矩阵,g表示组合导航系统的噪声状态系数矩阵,w表示组合导航系统系统噪声矢量。
[0052]
步骤二:依据初始对准模型得到速度和位置有关信息的矩阵z
[0053]
z=hx+η
[0054]
其中z:
[0055]
z=[δl δλ δv
e δvn]
t
[0056]
h为量测矩阵,η为量测噪声。
[0057]
步骤三:采用卡尔曼滤波对初始对准模型来进行估计,调整系统协方差矩阵的维数,优化系统的状态方程,对模型的估测如下:
[0058]
xk=φ
k∣k-1
x
k-1
+γ
k∣k-1wk-1
[0059]
zk=hkxk+vk[0060]
其中x
k-1
、w
k-1
为上一时刻已知的状态向量;φ
k∣k-1
、γ
k∣k-1
和hk为系统结构参数;xk、zk为此刻的状态和量测方程;对上述状态观测方程采用卡尔曼法进行迭代更新,能够对模型进行误差估计:
[0061]
由上一时刻的状态求取下一时刻的状态:
[0062]
x
k|k-1
=φ
k∣k-1
x
k-1
[0063]
求取下一时刻的状态预测协方差矩阵:
[0064][0065]
求取卡尔曼滤波增益:
[0066][0067]
进行状态估计:
[0068]
xk=x
k∣k-1
+kk(z
k-hkx
k∣k-1
)
[0069]
系统的状态协方差矩阵为:
[0070]
pk=(i-k
khk
)p
k|k-1
[0071]
对初始系统的状态协方差矩阵p0进行设计,降低系统的状态协方差矩阵的维数。由于船舶和飞机对于初始对准的时间要求是不一样的,本次发明通过对初始误差模型进行估计,从而达到降低系统初始对准时间的效果。
[0072]
步骤四:通过引用外部高精度传感器对惯导器件产生的累计误差进行修正。由于惯性器件本身所测量的角速度信息和加速度信息存在常值的零偏误差,随着时间的累积,该误差对导航器件精度影响是巨大的,最终造成整个系统的速度和位置信息发散。通过采用外部高精度测量器件获取速度和位置信息,采用多次迭代的方式计算出系统的零偏误差。
[0073]
在实际零偏估计的过程中,由于加速度计的零偏误差估计较为简单,而陀螺仪的
零偏误差估计较为困难,优先通过加速度计零偏误差对系统的状态矩阵进行优化降低系统的维数。接下来在对陀螺仪的零偏误差进行估计即可。
[0074]
本实施例能够提供船舶和飞机的高精度对准方法,根据船用、机用惯导器件的误差传播规律建立系统的初始对准模型,由于对准时间的要求,对系统的状态协方差矩阵的维数需要进一步的优化,需要先对一部分的误差量进行估计;在已有误差量估计的基础之上,对数据进行再一次迭代,优化系统的状态矩阵;这样既能够对加速度计的误差进行快速估计的同时,也能够实现陀螺仪的快速收敛,这样确保了惯导系统的对准精度;能够在短时间内达到惯导器件的使用规范。
[0075]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
[0076]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1