一种航迹推算辅助的离开角测向定位方法与流程
1.本发明涉及无线电信号测向技术领域,特别涉及一种航迹推算辅助的离开角测向定位方法。
背景技术:
2.室内定位已成为当前信息产业的一个热门应用,并呈现出广阔的市场前景,但是在消防应急领域的定位进展较为缓慢。惯导定位是目前消防应用的一个主要研究方向,但是,惯导定位技术受消防员运动姿态影响,在工作一段时间后会出现较大的累计误差,且无法自校准;基于无线电的室内定位技术,诸如:蓝牙ibeacon、wifi、uwb、蓝牙aoa等,尤其是uwb、蓝牙aoa具有较高的定位精度,适合用于辅助校准惯导状态提高定位稳定性。但是,uwb、蓝牙aoa等系统需要提前布线,且基站成本较高,在建筑改造中施工量大不具可行性,同时,遇到紧急情况会出现断电断网的情况,系统无法正常工作。
3.因此,针对施工布线成本高、紧急状态下断电断网等问题,基于离开角基站功耗低、无线通信,电池供电续航时间长等特点,设计了航迹推算辅助的离开角测向定位方法。
4.本发明通过终端接收低功耗aod基站广播信号获得观测信息,结合基站位置、终端工作高度等信息开展aod融合定位估计;终端获得传感器数据,结合aod融合定位结果修正航迹推算算法状态信息,并进行航迹推算定位估计;根据aod融合定位估计值质量,从aod融合定位估计值与航迹推算定位估计值中选取一个作为定位估计值并进行卡尔曼滤波。根据实际需要滤波结果可通过低频信道传输至指控平台。本发明能够使终端获得稳定准确的终端位置估计值,具有系统结构简单、实施方便、定位精度高的特点。
技术实现要素:
5.为了克服现有技术中的不足,本发明提供一种航迹推算辅助的离开角测向定位方法,能够使终端获得稳定准确的终端位置估计值,具有系统结构简单、实施方便、定位精度高的特点。
6.为了达到上述发明目的,解决其技术问题所采用的技术方案如下:
7.一种航迹推算辅助的离开角测向定位方法,包括以下步骤:
8.步骤s1:终端接收aod基站广播信号并标记接收时间,提取基站mac地址、离开角、rssi值信息;
9.步骤s2:终端基于观测信息,结合基站位置、终端工作高度信息开展aod多源异构数据融合定位估计;
10.步骤s3:终端获取加速度计、磁力计与陀螺仪传感器数据;
11.步骤s4:利用aod融合定位估计值、卡尔曼滤波结果、传感器数据,修正航迹推算算法状态信息;
12.步骤s5:利用传感器数据、修正信息以及时间间隔,进行航迹推算定位估计;
13.步骤s6:aod融合定位估计值性能若满足要求,则输出aod融合定位估计值,否则,
输出航迹推算结果定位估计值;
14.步骤s7:对定位估计值进行卡尔曼滤波,并输出定位结果。
15.进一步的,所述步骤s1中包括以下步骤:
16.步骤s11:基站广播的无线电信号中包含终端用于区分基站的mac地址;
17.步骤s12:终端接收基站广播信号进行接收时间标记;
18.步骤s13:终端提取基站mac地址、离开角、rssi值信息;
19.步骤s14:终端对接收数据按照基站mac地址进行分组,每一组别所有数据对应终端观测到一个基站的所有信息;
20.步骤s15:对每一组别数据按照接收时间先后进行排序。
21.可选的,步骤s11中,基站广播的无线电信号中还可包含基站位置信息。
22.进一步的,所述步骤s2中包括以下步骤:
23.步骤s21:每一类数据在时间间隔t内,将每一组向前nt时间段内的数据作为一个小组,n越小,实时性越强,抖动越大,相反,n越大,实时性越弱,抖动越小;
24.步骤s22:每个小组计算rssi值两两之间的距离,设置距离阈值,小于阈值的数据进行聚类,大于阈值的数据排除;
25.步骤s23:将各组聚类后的数据重新组合进行融合定位;
26.步骤s24:根据基站位置坐标、终端工作高度信息通过极点法初步定位;
27.步骤s25:以初步定位位置为中心,根据测向算法测向精度,俯仰角、方位角向周围拓展,形成模糊定位区域,真实位置极大概率落在模糊定位区域内;
28.步骤s26:根据俯仰角与rssi值联合设计模糊定位区域权重,俯仰角越大、能量越强,权重值越大,相反,俯仰角越小、能量越弱,权重值越小;
29.步骤s27:交叠区域的权重进行叠加,找出权重最大的区域,将该区域的重心位置作为终端的融合定位估计值。
30.进一步的,所述步骤s3中包括以下步骤:
31.步骤s31:终端以时间间隔t为周期获取加速度计、磁力计与陀螺仪传感器数据;
32.步骤s32:根据惯性敏感元器件误差随机过程模型修正传感器数据。
33.进一步的,所述步骤s4中包括以下步骤:
34.步骤s41:航迹推算方案需要对位置坐标、速度、姿态参数进行初始对准,确定终端与空间坐标系的相对关系;
35.步骤s42:当前时刻aod融合定位估计值作为定位估计值时,利用aod融合定位估计值、卡尔曼滤波结果、传感器数据,修正下一时刻航迹推算方案位置坐标、速度、姿态参数状态信息;
36.步骤s43:当前时刻航迹推算定位估计值作为定位估计值时,利用卡尔曼滤波结果、传感器数据,修正下一时刻航迹推算方案位置坐标、速度、姿态参数状态信息。
37.进一步的,所述步骤s5中包括以下步骤:
38.基于前一时刻位置坐标、速度、姿态参数状态信息,结合当前时刻加速度计、磁力计、陀螺仪传感器数据以及时间间隔,推算当前时刻位置坐标、速度、姿态参数状态变化,获得终端定位估计值。
39.进一步的,所述步骤s6中包括以下步骤:
40.结合aod基站位置、终端工作高度、离开角以及rssi值设计aod融合定位估计值质量评价标准,若满足标准要求,则选择aod融合定位估计值作为输出,否则,选择航迹推算定位估计值;
41.可选的,所述步骤s6中还包括以下步骤:
42.将系统定位区域划分为两类:aod定位区域与航迹推算定位区域,通过基站位置、终端工作高度、离开角以及rssi值等参数设计实现区域划分。
43.进一步的,所述步骤s7中包括以下步骤:
44.步骤s71:通过卡尔曼滤波对定位估计值进行平滑;
45.步骤s72:将卡尔曼滤波融合定位结果作为用于修正航迹推算方案位置坐标、速度、姿态等参数状态信息;
46.步骤s73:结合aod定位系统覆盖范围、俯仰角以及rssi值设计终端进入系统工作区域的准入条件,当观测数据满足准入条件,则认为终端进入系统工作范围,根据最新的定位估计值设置卡尔曼滤波的起始状态;
47.步骤s74:结合定位系统覆盖范围、俯仰角、rssi值以及接收时间标记设计终端离开系统工作区域的离开条件,当观测数据或者接收时间标记满足离开条件,则认为终端离开系统工作范围,停止卡尔曼滤波;
48.步骤s75:在系统覆盖范围内,对定位估计值进行卡尔曼滤波。
49.本发明由于采用以上技术方案,使之与现有技术相比,具有以下的优点和积极效果:
50.本发明一种航迹推算辅助的离开角测向定位方法,能够使终端获得稳定准确的终端位置估计值,具有系统结构简单、实施方便、定位精度高的特点。
附图说明
51.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单的介绍。显而易见,下面描述中的附图仅仅是本发明的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。附图中:
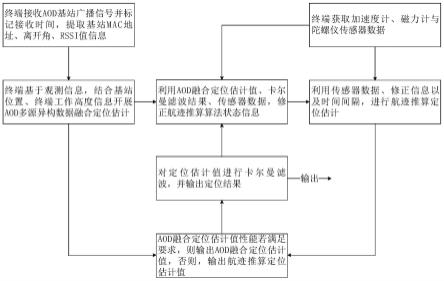
52.图1是本发明一种航迹推算辅助的离开角测向定位方法的流程示意图;
53.图2是本发明一种航迹推算辅助的离开角测向定位方法对应的定位系统的示意图。
具体实施方式
54.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
55.本实施例公开了一种航迹推算辅助的离开角测向定位方法,流程如图1所示,相应的定位系统如图2所示,具体包括以下步骤:
56.步骤s1:终端接收aod基站广播信号并标记接收时间,提取基站mac地址、离开角、rssi值等信息;
57.步骤s2:终端基于观测信息,结合基站位置、终端工作高度等信息开展aod多源异构数据融合定位估计;
58.步骤s3:终端获取加速度计、磁力计与陀螺仪传感器数据;
59.步骤s4:利用aod融合定位估计值、卡尔曼滤波结果、传感器数据,修正航迹推算算法状态信息;
60.步骤s5:利用传感器数据、修正信息以及时间间隔,进行航迹推算定位估计;
61.步骤s6:aod融合定位估计值性能若满足要求,则输出aod融合定位估计值,否则,输出航迹推算定位估计值;
62.步骤s7:对定位估计值进行卡尔曼滤波,并输出定位结果。
63.进一步的,所述步骤s1中包括以下步骤:
64.步骤s11:基站广播的无线电信号中包含终端用于区分基站的mac地址;
65.步骤s12:终端接收基站广播信号进行接收时间标记;
66.步骤s13:终端提取基站mac地址、离开角、rssi值等信息;
67.步骤s14:终端对接收数据按照基站mac地址进行分组,每一组别所有数据对应终端观测到一个基站的所有信息;
68.步骤s15:对每一组别数据按照接收时间先后进行排序。
69.可选的,步骤s11中,基站广播的无线电信号中还可包含基站位置信息。
70.进一步的,所述步骤s2中包括以下步骤:
71.步骤s21:每一类数据在时间间隔t(如0.1s)内,将每一组向前nt(如1s)时间段内的数据作为一个小组;
72.步骤s22:每个小组计算rssi值两两之间的距离,设置距离阈值,小于阈值的数据进行聚类,大于阈值的数据排除;
73.步骤s23:将各组聚类后的数据重新组合进行融合定位;
74.步骤s24:根据基站位置坐标、终端工作高度等信息通过极点法初步定位;
75.步骤s25:以初步定位位置为中心,根据测向算法测向精度,俯仰角、方位角向周围拓展,形成模糊定位区域,真实位置极大概率落在模糊定位区域内;
76.步骤s26:根据俯仰角与rssi值联合设计模糊定位区域权重,俯仰角越大、能量越强,权重值越大,相反,俯仰角越小、能量越弱,权重值越小;
77.步骤s27:交叠区域的权重进行叠加,找出权重最大的区域,将该区域的重心位置作为终端的融合定位估计值。
78.进一步的,所述步骤s3中包括以下步骤:
79.步骤s31:终端以时间间隔t(如0.1s)为周期获取加速度计、磁力计与陀螺仪传感器数据;
80.步骤s32:根据惯性敏感元器件误差随机过程模型修正传感器数据。
81.进一步的,所述步骤s4中包括以下步骤:
82.步骤s41:航迹推算方案需要对位置坐标、速度、姿态等参数进行初始对准,确定终端与空间坐标系的相对关系;
83.步骤s42:当前时刻aod融合定位估计值作为定位估计值时,利用aod融合定位估计值、卡尔曼滤波结果、传感器数据,修正下一时刻航迹推算方案位置坐标、速度、姿态等参数
状态信息;
84.步骤s43:当前时刻航迹推算定位估计值作为定位估计值时,利用卡尔曼滤波结果、传感器数据,修正下一时刻航迹推算方案位置坐标、速度、姿态等参数状态信息。
85.进一步的,所述步骤s5中包括以下步骤:
86.基于前一时刻位置坐标、速度、姿态等参数状态信息,结合当前时刻加速度计、磁力计、陀螺仪等传感器数据以及时间间隔,推算当前时刻位置坐标、速度、姿态等参数状态变化,获得终端定位估计值。
87.进一步的,所述步骤s6中包括以下步骤:
88.结合aod基站位置、终端工作高度、离开角以及rssi值设计aod融合定位估计值质量评价标准,若满足标准要求,则选择aod融合定位估计值作为输出,否则,选择航迹推算定位估计值;
89.可选的,所述步骤s6中还包括以下步骤:
90.将系统定位区域划分为两类:aod定位区域与航迹推算定位区域,通过基站位置、终端工作高度、离开角以及rssi值等参数设计实现区域划分。
91.进一步的,所述步骤s7中包括以下步骤:
92.步骤s71:通过卡尔曼滤波对定位估计值进行平滑;
93.步骤s72:将卡尔曼滤波融合定位结果作为用于修正航迹推算方案位置坐标、速度、姿态等参数状态信息;
94.步骤s73:结合aod定位系统覆盖范围、俯仰角以及rssi值设计终端进入系统工作区域的准入条件,当观测数据满足准入条件,则认为终端进入系统工作范围,根据最新的定位估计值设置卡尔曼滤波的起始状态;
95.步骤s74:结合定位系统覆盖范围、俯仰角、rssi值以及接收时间标记设计终端离开系统工作区域的离开条件,当观测数据或者接收时间标记满足离开条件,则认为终端离开系统工作范围,停止卡尔曼滤波;
96.步骤s75:在系统覆盖范围内,对定位估计值进行卡尔曼滤波。
97.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1