基于极坐标和颜色阈值的颜色餐盘检测方法与流程
1.本发明涉及餐盘检测技术领域,尤其是一种基于极坐标和颜色阈值的颜色餐盘检测方法。
背景技术:
2.随着各地高校、企事业单位等建筑规模的不断扩大和发展,活动场地流动人员也随之剧增,因而出现用餐高峰期购餐越发拥挤的问题,为此引入高科技手段对各地高校、企事业单位等地的食堂进行有效管理。现有食堂采用主流人工结算方式或rfid方法,两种方法都存在弊端,例如:一次性投入成本高、工作效率低等问题。从而催生出了基于颜色识别的菜品检测方法,该方法可根据餐盘颜色实现智能结算,对于实现食堂现代化,科学化管理具有一定的参考价值。市场现有的检测方法流程如下:基于常规图像下颜色餐盘识别物体小部分遮挡问题,大物体贯穿遮挡问题,光照对颜色影响问题等,针对餐盘颜色增加对比度,加大不同颜色之间的差距;定义颜色阈值,分别定义颜色阈值上限和颜色阈值下限;通过颜色蒙版,取颜色及其周边区域,如附图1所示,实现颜色识别;通过霍夫曼算法,设定极坐标阈值和笛卡尔坐标阈值来确定圆盘,附图2所示,实现阈值检测圆盘。
3.然而,现有的颜色识别的菜品检测方法不方便解决类内颜色区分,不同光照影响会导致类内颜色阈值误差较大,不能敲定特定阈值来区分类内颜色差异(例如橙黄色和淡黄色),而且在颜色阈值上下限截取蒙版区域阶段,强光照射很容易导致餐盘颜色发白,使得hsv值超出颜色区间,无法识别颜色;另外,检测设备的变动会导致原本参数失效,极坐标参数需要重新计算,参数设定受设备高度、镜头分辨率等因素影响,从而导致在非特定情况下的误码率偏高。所以,有必要对上述的方法进行改进,以提高餐盘检测的使用效率。
技术实现要素:
4.本发明的目的就是为了解决上述问题,提供一种基于极坐标和颜色阈值的颜色餐盘检测方法,避免参数设定受光照、设备高度、镜头分辨率等因素影响,以方便识别颜色,解决类内颜色区分,提高方法性能。
5.本发明的技术解决方案是:基于极坐标和颜色阈值的颜色餐盘检测方法,包括颜色阈值、极坐标和霍夫曼圆的方法,通过将未遮挡部分面积和圆弧转化成极坐标进而确定圆;针对菜品边缘遮挡,餐具贯穿遮挡,大排等大物遮挡效果情况下,达到提高对餐盘识别准确率的目标,其特点是:
6.所述颜色餐盘检测方法包括以下步骤:构建增强对比度函数和颜色阈值函数,加强不同颜色之间的对比度,并将不同颜色通过颜色阈值裁取相应颜色区域,得到餐盘颜色信息;在颜色阈值裁取区域内构建轮廓函数,得到未被遮挡部分的圆弧、轮廓形状和轮廓面积;利用获取的颜色信息转化笛卡尔坐标表达式,进一步确定极坐标参数;将获取的颜色信息转化极坐标表达式,进一步确定笛卡尔坐标参数;将得到的笛卡尔参数和极坐标参数分别作为输入数值,转化成霍夫曼参数;最后通过霍夫曼圆变换得到输出结果并在原图绘制。
7.进一步地,上述的基于极坐标和颜色阈值的颜色餐盘检测方法,其中:所述极坐标系坐标转换为笛卡尔坐标系坐标,极坐标系中的两个坐标ρ和θ可以由下面的公式转换为笛卡尔坐标系下的坐标值:x=ρcosθ、y=ρsinθ;极坐标系坐标中的有序数对(ρ,θ)就称为p点的极坐标,记为p(ρ,θ);ρ称为p点的极径,θ称为p点的极角。。
8.进一步地,上述的基于极坐标和颜色阈值的颜色餐盘检测方法,其中:所述笛卡尔坐标系坐标转换为极坐标系坐标,笛卡尔坐标系中的两个坐标x和y可以由下面的公式转换为极坐标系下的坐标值:θ=tan-1
(y/x);笛卡尔坐标系的两个坐标即为直角坐标系的直角坐标,标记为(x,y)。
9.更进一步地,上述的基于极坐标和颜色阈值的颜色餐盘检测方法,其中:所述笛卡尔坐标系下的霍夫变换,霍夫圆变换实现的算法经过笛卡尔xy坐标系中所有的非零像素点,并映射到abr坐标系中,通过abr中相交点的数量值与阈值点数值比较,若阈值点数值大则变化为圆,反之则未变化为圆。
10.更进一步地,上述的基于极坐标和颜色阈值的颜色餐盘检测方法,其中:所述极坐标系下的霍夫变换,利用给定平面会产生斜率接近无穷大,一组两个或更多点形成一条直线将产生在该线的(ρ,θ)处交叉的正弦曲线,检测正弦曲线的共线点变化数值,正弦曲线的振幅越大则变化为圆,反之越小则未变化为圆。
11.再进一步地,上述的基于极坐标和颜色阈值的颜色餐盘检测方法,其中:所述颜色阈值可以命令将灰度或彩色图像转换为高对比度的黑白图像,“阈值”命令用于确定图像的最亮和最暗区域,所述颜色阈值命令指定某个色阶作为阈值,所有比阈值亮的像素转换为白色,与之相对的所有比阈值暗的像素均转换为黑色。
12.如此,采用本发明技术方案,单独通过传统机器学习的方法,构建对比度函数和颜色阈值函数划分颜色区域,进而在颜色餐盘区域的基础上通过定义轮廓函数获取圆弧信息,包含弧度信息和形状信息,最后修改霍夫曼圆函数并添加极坐标系参数,进而使得遮挡程度达到可控效果,该种颜色餐盘识别方法解决了以往颜色餐盘识别方法针对部分遮挡导致识别效果差的问题,在遮挡问题方面有较大的提升,解决了部分遮挡,大物遮挡,贯穿遮挡导致餐盘识别错误的问题。
13.与现有技术相比,采用本发明技术方案之后,相比与以往的颜色餐盘识别方法,这种基于极坐标和霍夫曼圆的检测方法,可以在盘子边缘遮挡和贯穿遮挡情况下识别准确,在大面积遮挡情况下,通过露出的圆弧和露出的图形面积,转化成极坐标表达式来确定ρ和θ,进而通过调整ρ和θ的阈值达到部分大物遮挡下的餐盘识别效果,此过程不需要通过训练模型来检测颜色餐盘;而且,通过加强颜色对比度和制定颜色阈值上下限裁取相应颜色区域,加强了类间颜色的区分度,加强算法在颜色分辨方面的鲁棒性,同时使用极坐标和笛卡尔坐标参数作为判定条件,即使在多个遮挡,多个圆弧的情况下也可以精准判定识别餐盘圆弧。
附图说明
14.图1为现有技术裁取颜色区域的视觉检测效果图;
15.图2为现有技术未遮挡区域确定圆盘的视觉检测效果图;
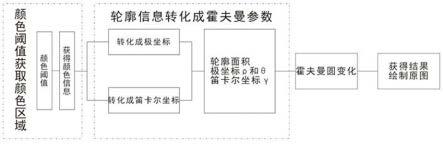
16.图3为本发明整体系统架构图。
具体实施方式
17.为能清楚说明本发明的技术特点和效果,下面结合附图进一步详细阐述本发明技术方案,以使其更易于理解和掌握。以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
18.一种基于极坐标和颜色阈值的颜色餐盘检测方法,包括颜色阈值、极坐标和霍夫曼圆的方法,通过将未遮挡部分面积和圆弧转化成极坐标进而确定圆;针对菜品边缘遮挡,餐具贯穿遮挡,大排等大物遮挡效果情况下,达到提高对餐盘识别准确率的目标。
19.与现有技术类似,基于常规图像下颜色餐盘识别物体小部分遮挡问题,大物体贯穿遮挡问题,光照对颜色影响问题等,针对餐盘颜色增加对比度,加大不同颜色之间的差距,定义颜色阈值,分别定义颜色阈值上限和颜色阈值下限,通过颜色蒙版,取颜色及其周边区域,附图1所示,用来识别颜色;通过霍夫曼算法,设定极坐标阈值和笛卡尔坐标阈值来确定圆盘,附图2所示,通过阈值检测圆盘。其中通过去掉抠图背景和噪音,并设置抠图的最小矩阵框,根据最小矩阵框求得矫正角度,替换菜品完成矫正之后,经由背景像素填充,为了避免多余的背景会影响替换效果,通过裁剪算法即可去掉多余的背景。
20.具体实施例1:
21.所述颜色阈值命令指定某个色阶作为阈值,所有比阈值亮的像素转换为白色,与之相对的所有比阈值暗的像素均转换为黑色,加强不同颜色之间的对比度,并将不同颜色通过颜色阈值裁取相应颜色区域,得到餐盘颜色信息;在颜色阈值裁取区域内构建轮廓函数,得到未被遮挡部分的圆弧、轮廓形状和轮廓面积;利用获取的颜色信息转化笛卡尔坐标表达式,利用公式θ=tan-1
(y/x)进一步确定极坐标参数;笛卡尔坐标系下的霍夫变换,霍夫圆变换实现的算法经过笛卡尔xy坐标系中所有的非零像素点,并映射到abr坐标系中,通过abr中相交点的数量值与阈值点数值比较,若阈值点数值大则变化为圆,反之则未变化为圆;最后通过霍夫曼圆变换得到输出结果并在原图绘制。
22.具体实施例2:
23.构建增强对比度函数和颜色阈值函数,加强不同颜色之间的对比度,并将不同颜色通过颜色阈值裁取相应颜色区域,得到餐盘颜色信息;在颜色阈值裁取区域内构建轮廓函数,得到未被遮挡部分的圆弧、轮廓形状和轮廓面积;将获取的颜色信息转化极坐标表达式,利用公式x=ρcosθ、y=ρsinθ进一步确定笛卡尔坐标参数;极坐标系下的霍夫变换,利用给定平面会产生斜率接近无穷大,一组两个或更多点形成一条直线将产生在该线的(ρ,θ)处交叉的正弦曲线,检测正弦曲线的共线点变化数值,正弦曲线的振幅越大则变化为圆,反之越小则未变化为圆;最后通过霍夫曼圆变换得到输出结果并在原图绘制。
24.本发明技术方案当中,通过颜色阈值获取颜色信息转化,并经由霍夫曼圆变化获得结果绘制原图是本案的技术关键,图3当中重点展示的是依次通过颜色阈值、极坐标及霍夫曼圆检测颜色餐盘的系统架构,具体优点为减少了人工结算效率低结算慢的弊端,节约了人力成本,相比于传统的rfid方案,一次性投入成本低且维护方便简单耐用。
25.如此,采用本发明技术方案,单独通过传统机器学习的方法,构建对比度函数和颜色阈值函数划分颜色区域,进而在颜色餐盘区域的基础上通过定义轮廓函数获取圆弧信息,包含弧度信息和形状信息,最后修改霍夫曼圆函数并添加极坐标系参数,进而使得遮挡程度达到可控效果,该种颜色餐盘识别方法解决了以往颜色餐盘识别方法针对部分遮挡导致识别效果差的问题,在遮挡问题方面有较大的提升,解决了部分遮挡,大物遮挡,贯穿遮挡导致餐盘识别错误的问题。
26.通过以上描述可以发现,与现有技术相比,采用本发明技术方案之后,,相比与以往的颜色餐盘识别方法,依次通过极坐标和霍夫曼圆进行检测,可以在盘子边缘遮挡或贯穿遮挡的情况下识别准确,即便在大面积遮挡情况下,也能够通过将露出的圆弧和露出的图形面积转化成极坐标表达式来确定ρ和θ,进而通过调整ρ和θ的阈值达到部分大物遮挡下的餐盘识别效果,此过程不需要通过训练模型来检测颜色餐盘,使得检测高效便捷;而且,通过加强颜色对比度和制定颜色阈值上下限裁取相应颜色区域,加强了类间颜色的区分度,加强算法在颜色分辨方面的鲁棒性,同时使用极坐标和笛卡尔坐标参数作为判定条件,即使在多个遮挡,多个圆弧的情况下也可以精准判定识别餐盘圆弧。
27.以上对本发明的技术方案、工作过程和实施效果进行了详细描述,需要说明的是,所描述的只是本发明的典型实例,除此之外,本发明还可以有其它多种具体实施方式,凡采用等同替换或等效变换形成的技术方案,均落在本发明要求保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1