一种绝对式光电角度传感器译码方法与流程
1.本发明涉及光电测量技术领域,尤其涉及一种绝对式光电角度传感器译码方法。
背景技术:
2.绝对式光电角度传感器是光、机、电一体化及数字化产品,主要用于轴角的精密测量,具有精度高、测量范围广、体积小、重量轻、可靠性好等优点。采用本专利的技术,可使产品具有更高的测量精度、更高的可靠性和重复性,不仅简化了编码器的信号处理电路,提高了编码器的精度和可靠性,而且可以实现编码器应用的小型化,节省空间,与同精度绝对式角度传感器相比体积更小。
3.现有绝对式光电角度传感器是光、机、电一体化及数字化产品,采用格雷码与矩阵码混合编码技术,具有精度高、测量范围广的特点,但其编码方式需要多条码道配合多组光耦,一般需要十余条码道,光栅的径向宽度较大,导致光电角度传感器的体积更大,器件的成本高、调试时间长,可靠性较低。现有绝对式光电角度传感器的译码过程,需要大量信号处理,计算繁琐,常采用粗码确定大概位置精码确定具体位置的粗码精码整合技术,所需电子元器件等硬件资源较多,导致其译码过程易出现累积计算误差较大,粗码精码整合复杂,导致绝对式光电角度传感器的运算时间长,响应速度慢,导致绝对式光电角度传感器无法具有更高的精度和可靠性。
技术实现要素:
4.本发明主要解决现有技术的绝对式光电角度传感器译码方法采用粗码精码整合技术,译码过程易出现累积计算误差较大的技术问题,提出一种绝对式光电角度传感器译码方法,取消了传统粗码精码整合的方法,以达到提高绝对式光电角度传感器的精度、运算速度和可靠性的目的。
5.本发明提供一种绝对式光电角度传感器译码方法:
6.所述绝对式光电角度传感器具有编码盘;所述编码盘具有三个码道,分别为a码道、b码道和c码道;a码道、b码道和c码道的刻线总数分别为na、nb和nc;其中,na、nb和nc均为正整数,na、nb和nc的最大公约数为1;na与nb的最大公约数为xb,nb与nc的最大公约数为xc,xb与xc互为质数,xb与xc的最大公约数为1;xa是na与xb相除的商值,xd是nc与xc相除的商值;na、nb和nc的公式如下:
7.na=xa
×
xb
ꢀꢀꢀ
(1)
8.nb=xb
×
xc
ꢀꢀꢀ
(2)
9.nc=xc
×
xd
ꢀꢀꢀ
(3)
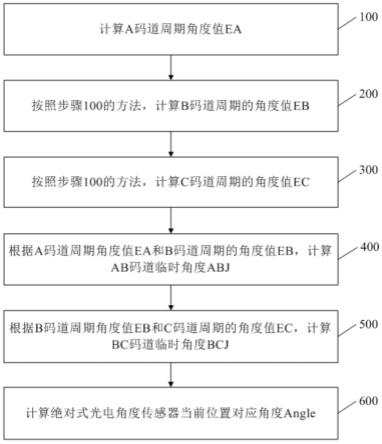
10.所述译码方法,包括以下过程:
11.步骤100,计算a码道周期角度值ea;包括步骤101至步骤105:
12.步骤101,绝对式角度传感器从0
°
旋转至360
°
的过程中,获取a码道的第一a码道正弦波asin和第二a码道正弦波acos,其中,第一a码道正弦波asin和第二a码道正弦波acos相
位正交、幅值相同,周期数均为na,幅值均为afuzhi;
13.步骤102,根据a码道的第一a码道正弦波asin和第二a码道正弦波acos,计算a码道周期角度值ea,a码道周期角度值ea为0
°
至360
°
范围内的角度值,并满足以下公式:
14.asin=afuzhi*sin(na*ea)
ꢀꢀꢀ
(4)
15.acos=afuzhi*sin(na*ea+π/2)
ꢀꢀꢀ
(5)
16.步骤103,比较第一a码道正弦波asin和第二a码道正弦波acos的正负性,比较第一a码道正弦波asin和第二a码道正弦波acos绝对值的大小,确定a码道周期角度值ea的所在角度区间;
17.步骤104,计算a码道第一局部角度值apj;
18.步骤105,根据a码道周期角度值ea的所在不同角度区间的对应关系,计算a码道周期角度值ea;
19.步骤200,按照步骤100的方法,计算b码道周期的角度值eb;
20.步骤300,按照步骤100的方法,计算c码道周期的角度值ec;
21.步骤400,根据a码道周期角度值ea和b码道周期的角度值eb,计算ab码道临时角度abj;
22.步骤500,根据b码道周期角度值eb和c码道周期的角度值ec,计算bc码道临时角度bcj;
23.步骤600,计算绝对式光电角度传感器当前位置对应角度angle。
24.进一步的,所述角度区间划分如下:
25.一区间qa,范围为0
°
至45
°
;
26.二区间qb,范围为45
°
至90
°
;
27.三区间qc,范围为90
°
至135
°
;
28.四区间qd,范围为135
°
至180
°
;
29.五区间qe,范围为180
°
至225
°
;
30.六区间qf,范围为225
°
至270
°
;
31.七区间qg,范围为270
°
至315
°
;
32.八区间qh,范围为315
°
至360
°
。
33.进一步的,步骤103,包括如下过程:
34.若第一a码道正弦波asin>0,第二a码道正弦波acos>0,|asin|>|acos|,则a码道周期角度值ea所在区间为二区间qb;
35.若第一a码道正弦波asin>0,第二a码道正弦波acos>0,|asin|《|acos|,则a码道周期角度值ea所在区间为一区间qa;
36.若第一a码道正弦波asin>0,第二a码道正弦波acos<0,|asin|>|acos|,则a码道周期角度值ea所在区间为三区间qc;
37.若第一a码道正弦波asin>0,第二a码道正弦波acos<0,|asin|《|acos|,则a码道周期角度值ea所在区间为四区间qd;
38.若第一a码道正弦波asin<0,第二a码道正弦波acos<0,|asin|>|acos|,则a码道周期角度值ea所在区间为六区间qf;
39.若第一a码道正弦波asin<0,第二a码道正弦波acos<0,|asin|《|acos|,则a码道
周期角度值ea所在区间为五区间qe;
40.若第一a码道正弦波asin<0,第二a码道正弦波acos>0,|asin|>|acos|,则a码道周期角度值ea所在区间为七区间qg;
41.若第一a码道正弦波asin<0,第二a码道正弦波acos>0,|asin|《|acos|,则a码道周期角度值ea所在区间为八区间qh。
42.进一步的,所述步骤104,包括如下过程:
43.计算a码道第一局部正切波atan,满足下式
[0044][0045]
计算a码道第一局部角度值apj,满足下式
[0046]
apj=arctan(atan)
ꢀꢀꢀ
(7)
[0047]
其中,第一局部角度值apj为0
°
至45
°
之间的角度值。
[0048]
进一步的,所述步骤105,包括如下过程:
[0049]
若a码道周期角度值ea所在区间为一区间qa,则ea=apj;
[0050]
若a码道周期角度值ea所在区间为二区间qb,则ea=90
°‑
apj;
[0051]
若a码道周期角度值ea所在区间为三区间qc,则ea=90
°
+apj;
[0052]
若a码道周期角度值ea所在区间为四区间qd,则ea=180
°‑
apj;
[0053]
若a码道周期角度值ea所在区间为五区间qe,则ea=180
°
+apj;
[0054]
若a码道周期角度值ea所在区间为六区间qf,则ea=270
°‑
apj;
[0055]
若a码道周期角度值ea所在区间为七区间qg,则ea=270
°
+apj;
[0056]
若a码道周期角度值ea所在区间为八区间qh,则ea=360
°‑
apj。
[0057]
进一步的,所述步骤400,包括如下过程:
[0058]
ab码道临时角度abj满足下列两个公式:
[0059][0060][0061]
其中,第一ab码道遍历参数iab和第二ab码道遍历参数jab均为整数;
[0062]
得到第二ab码道遍历参数jab的计算公式:
[0063][0064]
将第一ab码道遍历参数iab从0至xa遍历取值,仅有唯一的iab值可计算得到满足0≤jab<xc范围要求的第二ab码道遍历参数jab值;
[0065]
根据求解得到的iab值可计算ab码道临时角度abj。
[0066]
进一步的,所述步骤500,包括如下过程:
[0067]
bc码道临时角度bcj满足下列两个公式:
[0068]
[0069][0070]
其中,第一bc码道遍历参数ibc和第二bc码道遍历参数jbc均为整数;
[0071]
得到第二bc码道遍历参数jbc的计算公式:
[0072][0073]
将第一bc码道遍历参数ibc从0至xb遍历取值,仅有唯一的ibc值可计算得到满足0≤jbc<xd范围要求的第二bc码道遍历参数jbc值;
[0074]
根据求解得到的ibc值可计算bc码道临时角度bcj。
[0075]
进一步的,所述步骤600,包括如下过程:
[0076]
当前位置对应角度angle满足下列两个公式:
[0077][0078][0079]
其中,第一总体遍历参数iangle和第二总体遍历参数jangle均为整数;
[0080]
得到第二总体遍历参数jangle的计算公式:
[0081][0082]
将第一总体遍历参数iangle从0至xb遍历取值,仅有唯一的iangle值可计算得到满足0≤jangle<xc范围要求的第二总体遍历参数jangle值;
[0083]
根据求解得到的iangle值,可计算绝对式光电角度传感器当前位置对应角度angle。
[0084]
本发明提供的一种绝对式光电角度传感器译码方法,取消了传统粗码计算部分,利用精码替代粗码方式,采用不同码道互相查找绝对位置的方法,采用了从局部查找至全局查找的方式,实现了高精度高可靠性的绝对式角度传感器译码方法,使产品具有更高的测量精度、更快的响应速度、更高的可靠性和重复性,不仅简化了绝对式光电角度传感器的信号处理电路,加快了绝对式光电角度传感器的运算速度,提高了绝对式光电角度传感器的精度、响应速度和可靠性,而且可以实现绝对式光电角度传感器应用的小型化,节省空间,与同精度绝对式角度传感器相比体积更小。
附图说明
[0085]
图1是本发明提供的绝对式光电角度传感器译码方法的实现流程图;
[0086]
图2是本发明提供的绝对式光电角度传感器的结构示意图;
[0087]
图3是本发明提供的第一a码道正弦波asin和第二a码道正弦波acos的示意图。
具体实施方式
[0088]
为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面
结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部内容。
[0089]
本发明实施例提供一种绝对式光电角度传感器译码方法。
[0090]
如图1所示,所述绝对式光电角度传感器具有编码盘;所述编码盘具有三个码道,分别为a码道、b码道和c码道;a码道、b码道和c码道的刻线总数分别为na、nb和nc;其中,na、nb和nc均为正整数,na、nb和nc的最大公约数为1;na与nb的最大公约数为xb,nb与nc的最大公约数为xc,xb与xc互为质数,xb与xc的最大公约数为1;xa是na与xb相除的商值,xd是nc与xc相除的商值;na、nb和nc的公式如下:
[0091]
na=xa
×
xb
ꢀꢀꢀ
(1)
[0092]
nb=xb
×
xc
ꢀꢀꢀ
(2)
[0093]
nc=xc
×
xd
ꢀꢀꢀ
(3)
[0094]
本实施例采用的绝对式光电角度传感器,无狭缝盘,仅有编码盘,编码盘有三个码道。
[0095]
如图2所示,所述译码方法,包括以下过程:
[0096]
步骤100,计算a码道周期角度值ea;包括步骤101至步骤105:
[0097]
步骤101,绝对式角度传感器的角度测量范围为0
°
至360
°
。如图3所示,绝对式角度传感器从0
°
旋转至360
°
的过程中,获取a码道的第一a码道正弦波asin和第二a码道正弦波acos,其中,第一a码道正弦波asin和第二a码道正弦波acos相位正交、幅值相同,周期数均为na,幅值均为afuzhi。
[0098]
步骤102,根据a码道的第一a码道正弦波asin和第二a码道正弦波acos,计算a码道周期角度值ea,a码道周期角度值ea为0
°
至360
°
范围内的角度值,并满足以下公式:
[0099]
asin=afuzhi*sin(na*ea)
ꢀꢀꢀ
(4)
[0100]
acos=afuzhi*sin(na*ea+π/2)
ꢀꢀꢀ
(5)
[0101]
步骤103,比较第一a码道正弦波asin和第二a码道正弦波acos的正负性,比较第一a码道正弦波asin和第二a码道正弦波acos绝对值的大小,确定a码道周期角度值ea的所在角度区间。
[0102]
将0
°
至360
°
的角度测量范围划分为八个角度区间:一区间qa,范围为0
°
至45
°
;二区间qb,范围为45
°
至90
°
;三区间qc,范围为90
°
至135
°
;四区间qd,范围为135
°
至180
°
;五区间qe,范围为180
°
至225
°
;六区间qf,范围为225
°
至270
°
;七区间qg,范围为270
°
至315
°
;八区间qh,范围为315
°
至360
°
。
[0103]
若第一a码道正弦波asin>0,第二a码道正弦波acos>0,|asin|>|acos|,则a码道周期角度值ea所在区间为二区间qb;
[0104]
若第一a码道正弦波asin>0,第二a码道正弦波acos>0,|asin|《|acos|,则a码道周期角度值ea所在区间为一区间qa;
[0105]
若第一a码道正弦波asin>0,第二a码道正弦波acos<0,|asin|>|acos|,则a码道周期角度值ea所在区间为三区间qc;
[0106]
若第一a码道正弦波asin>0,第二a码道正弦波acos<0,|asin|《|acos|,则a码道周期角度值ea所在区间为四区间qd;
[0107]
若第一a码道正弦波asin<0,第二a码道正弦波acos<0,|asin|>|acos|,则a码道周期角度值ea所在区间为六区间qf;
[0108]
若第一a码道正弦波asin<0,第二a码道正弦波acos<0,|asin|《|acos|,则a码道周期角度值ea所在区间为五区间qe;
[0109]
若第一a码道正弦波asin<0,第二a码道正弦波acos>0,|asin|>|acos|,则a码道周期角度值ea所在区间为七区间qg;
[0110]
若第一a码道正弦波asin<0,第二a码道正弦波acos>0,|asin|《|acos|,则a码道周期角度值ea所在区间为八区间qh。
[0111]
如下表所示:
[0112][0113][0114]
步骤104,计算a码道第一局部角度值apj。
[0115]
计算a码道第一局部正切波atan,满足下式
[0116][0117]
计算a码道第一局部角度值apj,满足下式
[0118]
apj=arctan(atan)
ꢀꢀꢀꢀ
(7)
[0119]
其中,第一局部角度值apj为0
°
至45
°
之间的角度值。
[0120]
步骤105,根据a码道周期角度值ea的所在不同角度区间的对应关系,计算a码道周期角度值ea。
[0121]
若a码道周期角度值ea所在区间为一区间qa,则ea=apj;
[0122]
若a码道周期角度值ea所在区间为二区间qb,则ea=90
°‑
apj;
[0123]
若a码道周期角度值ea所在区间为三区间qc,则ea=90
°
+apj;
[0124]
若a码道周期角度值ea所在区间为四区间qd,则ea=180
°‑
apj;
[0125]
若a码道周期角度值ea所在区间为五区间qe,则ea=180
°
+apj;
[0126]
若a码道周期角度值ea所在区间为六区间qf,则ea=270
°‑
apj;
[0127]
若a码道周期角度值ea所在区间为七区间qg,则ea=270
°
+apj;
[0128]
若a码道周期角度值ea所在区间为八区间qh,则ea=360
°‑
apj。
[0129]
步骤200,按照步骤100的方法,计算b码道周期的角度值eb;
[0130]
同理,b码道可得到第一b码道正弦波bsin和第二b码道正弦波bcos,第一b码道正弦波bsin和第二b码道正弦波bcos两路相位正交、幅值相同,周期数均为nb。按照步骤步骤101至步骤105的方法,计算计算b码道周期的角度值eb。
[0131]
步骤300,按照步骤100的方法,计算c码道周期的角度值ec。
[0132]
同理,c码道可得到第一c码道正弦波csin和第二c码道正弦波ccos,第一c码道正弦波csin和第二c码道正弦波ccos两路相位正交、幅值相同,周期数均为nc。按照步骤步骤101至步骤105的方法,计算计算c码道周期的角度值ec。
[0133]
步骤400,根据a码道周期角度值ea和b码道周期的角度值eb,计算ab码道临时角度abj。ab码道临时角度abj满足下列两个公式:
[0134][0135][0136]
其中,第一ab码道遍历参数iab和第二ab码道遍历参数jab均为整数。
[0137]
得到第二ab码道遍历参数jab的计算公式:
[0138][0139]
将第一ab码道遍历参数iab从0至xa遍历取值,仅有唯一的iab值可计算得到满足0≤jab<xc范围要求的第二ab码道遍历参数jab值。
[0140]
根据求解得到的iab值可计算ab码道临时角度abj。
[0141]
步骤500,根据b码道周期角度值eb和c码道周期的角度值ec,计算bc码道临时角度bcj。bc码道临时角度bcj满足下列两个公式:
[0142][0143][0144]
其中,第一bc码道遍历参数ibc和第二bc码道遍历参数jbc均为整数。
[0145]
得到第二bc码道遍历参数jbc的计算公式:
[0146][0147]
将第一bc码道遍历参数ibc从0至xb遍历取值,仅有唯一的ibc值可计算得到满足0≤jbc<xd范围要求的第二bc码道遍历参数jbc值。
[0148]
根据求解得到的ibc值可计算bc码道临时角度bcj。
[0149]
步骤600,计算绝对式光电角度传感器当前位置对应角度angle,当前位置对应角度angle满足下列两个公式:
[0150]
[0151][0152]
其中,第一总体遍历参数iangle和第二总体遍历参数jangle均为整数。
[0153]
得到第二总体遍历参数jangle的计算公式:
[0154][0155]
将第一总体遍历参数iangle从0至xb遍历取值,仅有唯一的iangle值可计算得到满足0≤jangle<xc范围要求的第二总体遍历参数jangle值。
[0156]
根据求解得到的iangle值,可计算绝对式光电角度传感器当前位置对应角度angle。
[0157]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1