一种倾斜状态下油箱油量液位标定系统及方法与流程
1.本发明涉及车辆检测技术领域,尤其涉及一种倾斜状态下油箱油量液位标定系统及方法。
背景技术:
2.很多车辆在作业时长期处于高低不平的工地上,这时车上搭载的油箱也会一直处于倾斜状态,这种情况下对油箱油量的标定存在很大困难。现有技术公开了一种车辆油箱油量标定方法,通过智能终端访问服务器平台选择标定模式,其标定模式为重新标定模式、修正标定模式或追溯修正标定模式;该方案通过智能终端或室内联网的pc机实现对车辆油箱油量数据的标定,提高标定效率和精度。
3.但是,上述方式依然是针对车辆普通状态下的标定,并不适用于倾斜状态下油箱油量的标定。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的是提供一种倾斜状态下油箱油量液位标定系统及方法,不受油箱形状限制,既能够规避人工测量带来的误差,还能够准确的计算出倾斜状态下的车辆油耗。
5.为了实现上述目的,本发明是通过如下的技术方案来实现:
6.第一方面,本发明的实施例提供了一种倾斜状态下油箱油量液位标定系统,包括:
7.流速检测模块,用于采集流速信息,并将流速信息传输至信息采集模块;
8.信息采集模块,包括液位高度检测模块、姿态检测模块和无线传输模块,液位高度检测模块用于获取液位高度值,姿态检测模块用于获取车辆倾斜角度值,无线传输模块用于将液位高度值、油箱倾斜角度值、流速值传输至主机;
9.主机,用于通过接收的液位高度值、油箱倾斜角度值、流速值计算油箱倾斜状态下液位油量和倾斜角度。
10.作为进一步的实现方式,还包括平台,主机与平台通过网络进行交互,平台能够进行油量高度的曲线模型拟合运算。
11.作为进一步的实现方式,所述主机包括通讯模块、数据处理模块,数据处理模块用于进行倾斜状态下液位油量和倾斜角度的计算,接收信息采集模块的液位高度值、油箱斜角度值、流速值与平台数据,并通过通讯模块与平台进行交互。
12.作为进一步的实现方式,所述通讯模块为4g模块或5g模块。
13.作为进一步的实现方式,所述主机还包括用于供电的太阳能模块。
14.作为进一步的实现方式,所述姿态检测模块包括陀螺仪和加速度计,通过陀螺仪和加速度计结合获取车辆实时倾斜角度。
15.第二方面,本发明的实施例还提供了一种倾斜状态下油箱油量液位标定方法,包括:
16.获取油箱加油时不同时刻的多组流速数据,并获取车辆倾斜角度;
17.获取初始时刻油箱液位高度和油量值,结合流速数据计算不同时刻对应的多组油量数据;
18.以多组油量数据的平均值作为对应时刻油量的标定值,并得到对应于该油量标定值的高度标定值、倾斜角度标定值,形成油箱油量液位标定方案。
19.作为进一步的实现方式,记录未加油时的初始液位高度h0、油量、倾斜角度为θ,以t0时间作为初始数据采集时间;
20.加油后在对应采集时刻连续采集多个点的油量数据,将多个油量数据的平均油量值作为该时刻的油量数据,并记录此时的液位高度、倾斜角度。
21.作为进一步的实现方式,根据不同时刻不同倾斜角度下的液位高度、油量数据得到油箱液位油量的曲线模型。
22.作为进一步的实现方式,对拟合出的油箱液位油量的曲线模型进行优化,以估算t0时刻之前的油量。
23.本发明的有益效果如下:
24.(1)本发明的标定系统主要包括流速检测模块、信息采集模块、主机,流速检测模块用于采集流速,并将流速信号上传至信息采集模块,信息采集模块中的液位高度检测模块用于获取液位高度值,imu姿态检测模块用于获取各轴上的分量,无线传输模块将液位高度值、油箱的倾斜角度值、流速值上传至主机,以通过主机进行倾斜状态下液位油量和倾斜角度的计算,得到油箱油量液位标定方案。
25.(2)本发明的标定系统还包括平台,平台通过通讯模块与主机交互,能够进行油量高度的曲线模型拟合运算,并能够展示标定结果;通过对倾斜状态下油箱油量的智能化标定,不受油箱形状限制,既能够规避人工测量带来的误差,智能化自主标定完成特殊情况下的油箱油量液位的标定,根据标定出两刻度之间的油量,能够准确的计算出倾斜状态下的车辆油耗,对于车辆在多种停靠的状态下油量的监控起到了关键性的作用。
26.(3)本发明通过对应时刻连续采集多个点的数据,将多个点的平均油量值作为该时刻的油量数据,并记录此时的液位高度、倾斜角度,主机将获取的高度值、倾斜角度、油量值上传平台,通过平台进行具体的标定,保证数据的准确性。
附图说明
27.构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
28.图1是本发明根据一个或多个实施方式的系统框图;
29.图2是本发明根据一个或多个实施方式的流程图。
30.其中,1、流速检测模块,2、信息采集模块,3、主机,4、平台。
具体实施方式
31.实施例一:
32.本实施例提供了一种倾斜状态下油箱油量液位标定系统,如图1所示,包括流速检测模块1、信息采集模块2、主机3和平台4,信息采集模块2包括液位高度检测模块、imu姿态
检测模块和无线传输模块,其中,流速检测模块1、液位高度检测模块、imu姿态检测模块和无线传输模块安装于油箱盖处。
33.流速检测模块1用于采集流速信息,并将流速信息上传至信息采集模块2;液位高度检测模块用于获取液位高度值,imu姿态检测模块用于获取各轴上的分量,以得到油箱倾斜角度值。
34.由于车辆与油箱是刚性连接,因此车辆的倾斜程度能够由安装在油箱盖处的imu姿态检测模块进行测量,其中imu姿态检测模块包括三轴陀螺仪和三轴加速度计,通过加速度计和陀螺仪这两种传感器,能够更好地跟踪并捕捉三维空间的完整运动;车辆倾斜角度可以通过加速度计进行计算。
35.在本实施例中,无线传输模块采用蓝牙模块,蓝牙模块能够将液位高度值、油箱倾斜角度值、流速值上传至主机。当然,在其他实施例中,无线传输模块也可以采用其他方式。
36.主机3安装于车辆的主驾驶室外部上方,包括太阳能模块、通讯模块、数据处理模块,其中,通讯模块可以为4g模块或5g模块;数据处理模块能够进行倾斜状态下液位油量的计算和倾斜角度的计算,并接收信息采集模块2的液位高度值、油箱倾斜角度值、流速值以及平台4的相关数据,通过4g或5g网络与平台4进行交互;主机3通过太阳能模块进行供电。
37.主机3主要实现油箱液位数据标定的功能,本实施例的主机3嵌入了强大的数据运算能力,支持每秒mhz的频率进行数据采集,同时采用12位模拟/数字转换器(ad)进行数据的传输,采集到的数字信号二进数位数为12位来表示对应的模拟量,即采集数据可精确到(1111 1111 1111)2=(4095)
10
位,其中位数越多,转换的结果越精确,但所需要的存储容量也越大,数据的采集频率和数据的位数最终决定了该数据的精确程度。
38.平台4能够进行油量高度的曲线模型拟合运算、信息的可视化展示及其他相关算法的运算等,也可同时将数据传送至手持设备终端进行展示。
39.实施例二:
40.本实施例提供了一种倾斜状态下油箱油量液位标定方法,采用实施例一所述的系统,包括:
41.获取油箱加油时不同时刻的多组流速数据,并获取车辆倾斜角度;
42.获取初始时刻油箱液位高度和油量值,结合流速数据计算不同时刻对应的多组油量数据;
43.以多组油量数据的平均值作为对应时刻油量的标定值,并得到对应于该油量标定值的高度标定值、倾斜角度标定值,形成油箱油量液位标定方案。
44.具体的,如图2所示,包括以下步骤:
45.(1)通过流速检测模块对油箱加油时的流速进行检测记录,为v
11
、v
12
…vn5
;
46.其中,v
11
表示t1时刻的第一组流速数据,v
12
表示t1时刻的第二组流速数据,
……
,v
n5
表示tn时刻的第五组流速数据。
47.(2)通过液位高度检测模块获取特定时刻下倾斜的液位高度,为标定提供数据支撑;imu姿态检测模块实时获取车辆的倾斜角度。
48.由于车辆与油箱是刚性连接,因此车辆的倾斜程度能够由安装在油箱盖处的imu进行测量,其中imu主要包括三轴陀螺仪及三轴加速度计,车辆倾斜角度可以通过加速度计进行计算,具体的计算公式如下:
[0049][0050]
其中,a
x
为x轴上的加速度值,ay为y轴上的加速度值,az为z轴上的加速度值,三轴上的加速度值上传至主机,主机通过三轴的分量进行倾斜角度的计算。
[0051]
(3)记录当前未加油时的初始液位高度h0,油量l0为0,倾斜角度为θ(0≤θ≤90
°
),以t0时间作为初始数据采集时间。
[0052]
为了保证数据的准确性,加油后在对应采集时刻连续采集多个点的数据,本实施例采集5个点的数据,当然,在其他实施例中,数据采集点也可以为其他个数。
[0053]
将五个点的平均油量值作为该时刻的油量数据,并记录此时的液位高度h1、倾斜角度θ1,主机将获取的高度值、倾斜角度、油量值上传平台,由平台进行具体的标定。
[0054]
(4)由主机计算出某时刻的油量,平台进行液位的标定,计算如下:
[0055]
t0时刻:标定初始油箱液位高度h0(该数据由传感器上传主机获取),油量为l0=0(油箱中目前剩余的油量不在此次标定范围内)。
[0056]
t1时刻:五组油量数据分别为:
[0057]a11
=v
11
*δt+l0;
[0058]a12
=v
12
*δt+a
11
;
[0059]a13
=v
13
*δt+a
12
;
[0060]a14
=v
14
*δt+a
13
;
[0061]a15
=v
15
*δt+a
14
;
[0062]
其中,a
11
表示t1时刻第一组油量数据,a
12
表示t1时刻第二组油量数据,a
13
表示t1时刻第三组油量数据,a
14
表示t1时刻第四组油量数据,a
15
表示t1时刻第五组油量数据。
[0063]
δt=t
1-t0,则t1时刻l1=average(a
11:a15
),主机上传数据,平台标定此刻的液位高度为h1,倾斜角度为θ1,油量为l1;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ①
[0064]
t2时刻:五组油量数据分别为:
[0065]a21
=v
21
*δt+l1;
[0066]a22
=v
22
*δt+a
21
;
[0067]a23
=v
23
*δt+a
22
;
[0068]a24
=v
24
*δt+a
23
;
[0069]a25
=v
25
*δt+a
24
;
[0070]
其中,a
21
表示t2时刻第一组油量数据,a
22
表示t2时刻第二组油量数据,a
23
表示t2时刻第三组油量数据,a
24
表示t2时刻第四组油量数据,a
25
表示t2时刻第五组油量数据。
[0071]
δt=t
2-t1,则t2时刻l2=average(a
21
:a
25
),主机上传数据,平台标定此刻液位高度为h2,倾斜角度为θ2,油量为l2;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ②
[0072]
…
[0073]
tn时刻:五组油量数据分别为:
[0074]an1
=v
n1
*δt+l
n-1
;
[0075]an2
=v
n2
*δt+a
n1
;
[0076]an3
=v
n3
*δt+a
n2
;
[0077]an4
=v
n4
*δt+a
n3
;
[0078]an5
=v
n5
*δt+a
n4
;
[0079]
其中,a
n1
表示tn时刻第一组油量数据,a
n2
表示tn时刻第二组油量数据,a
n3
表示tn时刻第三组油量数据,a
n4
表示tn时刻第四组油量数据,a
n5
表示tn时刻第五组油量数据。
[0080]
δt=t
n-t
n-1
,则tn时刻ln=average(a
n1
:a
n5
),标定此刻的液位高度为hn,倾斜角度为θn,油量为ln;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ③
[0081]
依上述方式进行高度、倾斜角度、油量的标定。
[0082]
最后根据多次采集到的不同时刻不同倾斜角度下的液位高度、油量数据拟合出适合该油箱液位油量的曲线模型。
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ④
[0083]
(5)按照步骤(1)(2)(3)(4)通过对该油箱的多次标定,能够更精确的展示该车辆的油量油耗数据。加满油之后,采集到的数据通过蓝牙模块将相应的数据打包上传给主机。
[0084]
(6)平台对获取的数据进行统计和展示,对拟合出的油箱液位油量的曲线模型进行优化,为估算t0时刻之前的油量做数据储备,也能够根据机械的工作时长进行油耗估算。
[0085]
进一步的,对该油箱的加油数据、油耗数据的多次采集之后,可以根据采集到的某时刻的油量和液位高度作为一组数据组,建立一条线性函数,拟合一个最贴近该油箱液位油量变化的线性曲线,为估算油箱中未标定的部分进行估算做依据。
[0086]
具体的拟合过程为:首先进行数据优化,舍弃一些偏远的点,筛选出一定范围内拟合直线的点,使拟合出的直线能够更贴合数据的变化,可以提高对数据的运算速度,在本实施例中,优化方法采用标准方差法,如下:
[0087]
根据采集的高度xi,油量li的数据组(xi,li)(其中i=0,1,
…
m);p(x)为油箱i时刻的油量;
[0088]
设直线p(x)=a+bx
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0089]
其中,a,b分别为上述直线的参数;
[0090][0091]
式(2)中,avg表示平均值。
[0092]
三倍标准方差为阈值,当一个点的标准差大于三倍标准偏差,那么可以认定它为无用值,将其排除,对于剩下的点拟合曲线的算法如下:
[0093]
均方误差为:
[0094][0095]
q(a,b)是二元函数,q(a,b)的极小值要满足:
[0096][0097][0098]
整理可以得到拟合曲线满足的方程:
[0099][0100]
或者可以表示为:
[0101][0102]
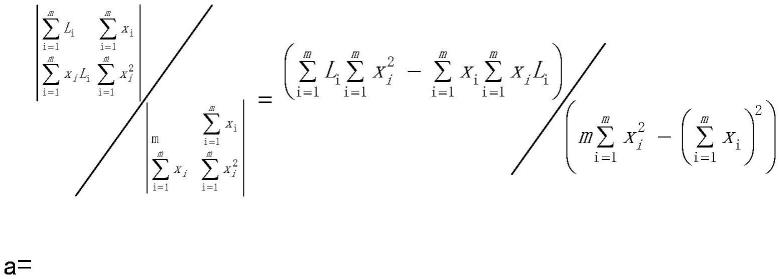
(2)式(1.2)为拟合曲线的法方程,利用克莱姆法则或者消元法解出方程:
[0103][0104][0105]
(3)数据标定:
[0106]
通过多次的采集加油数据,找出最贴近该油箱的曲线模型,标定出车辆倾斜状态下油箱的油量液位,该标定的方式不局限于油箱的形状。
[0107]
本实施例的方法通过对倾斜状态下油箱油量的智能化标定,不受油箱形状限制,既能够规避人工测量带来的误差,智能化自主标定完成特殊情况下的油箱油量液位的标定,根据标定出两刻度之间的油量,能够准确的计算出倾斜状态下的车辆油耗,对于车辆在多种停靠的状态下油量的监控起到了关键性的作用。
[0108]
以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1