一种基于非接触式液位传感器的液位监测方法与流程
1.本发明属于液位监测技术领域,具体而言是一种基于非接触式液位传感器的液位监测方法。
背景技术:
2.液位传感器是将液位的高度转化为电信号的形式输出,其主要用途就是液位的监测,随着人们对液位传感器使用需求的提升,传统液位传感器由于需要将其放置在待监测液体中,导致其体现出来的弊端越来越明显,例如液位监测精度低、不适合用于腐蚀性强的介质等。在这种情况下,非接触式液位传感器应运而生,其通过非接触式的设计可以隔着任何介质检测到容器内的水位变化,容器中的污垢、沉淀物都不会影响检测的结果,从而能够有效提高监测结果的精准度。
3.鉴于非接触式液位传感器的监测优势,其被广泛应用于智能家用电器的使用中,如加湿器、智能拖地机、净水器、咖啡机等,特别是智能拖地机的使用,伴随着当今人们生活节奏的加快,使得人们没有过多的时间和精力去处理家务,这时智能拖地机的出现能够很好地解决了这个问题,由于拖地需要用到水,因此智能拖地机在执行拖地操作时,需要由非接触式液位传感器实现储水箱水位监测的目的。
4.但目前智能拖地机内非接触式液位传感器的应用只用于水位监测预警,即在拖地操作中监测到水位过低时进行添水预警,在添水操作时监测到水位满水时进行自停预警,导致应用过于简单,缺乏深度的应用,具体表现在忽略了在拖地过程中的单位面积出水量动态调控应用,当前拖地过程中的智能拖地机单位面积出水量调控是由人工在拖地前就固定控制好的,一方面其在整个拖地过程中无法进行自动调控,存在调控灵活度差的缺陷,容易出现固定控制的单位面积出水量与地面的清洁需水量不匹配的情况,从而导致清洁效果不佳,另一方面也容易出现储水箱内的储水量无法满足整个房间的拖地需求,需要进行二次储水才能完成拖地需求,不仅造成了水资源的浪费,还导致拖地效率变低。
技术实现要素:
5.针对上述不足,本发明提供一种针对智能拖地机在拖地过程中单位面积出水量动态调控应用的基于非接触式液位传感器的液位监测方法,能够有效解决上述背景技术中涉及的问题。
6.本发明的目的可以通过以下技术方案来实现:
7.一种基于非接触式液位传感器的液位监测方法,包括以下步骤:
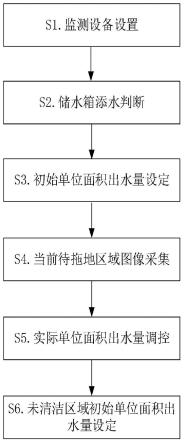
8.s1.监测设备设置:在智能拖地机的储水箱外壁上设置非接触式液位传感器,在智能拖地机的顶部设置微型扫描仪和高清摄像头;
9.s2.储水箱添水判断:智能拖地机在执行拖地操作前通过微型扫描仪对目标清洁房间进行扫描,得到目标清洁房间的面积,并利用非接触式液位传感器对智能拖地机的储水箱进行初始水位高度监测,进而根据目标清洁房间的面积和储水箱的初始水位高度判断
智能拖地机的储水箱是否需要添水,若判断需要添水,则执行添水操作后再执行步骤s3,若判断不需要添水,则直接执行步骤s3;
10.s3.初始单位面积出水量设定:从智能拖地机后台调取目标清洁房间的清洁日志和拖地路线,并基于目标清洁房间的清洁日志和面积对智能拖地机在目标清洁房间的初始单位面积出水量进行设定;
11.s4.当前待拖地区域图像采集:智能拖地机在按照调取的目标清洁房间拖地路线和设定的初始单位面积出水量执行拖地操作过程中,实时由高清摄像头对当前待拖地区域进行图像采集;
12.s5.实际单位面积出水量调控:根据采集的当前待拖地区域图像进行当前待拖地区域的实际单位面积出水量调控;
13.s6.未清洁区域初始单位面积出水量设定:在调控当前待拖地区域的实际单位面积出水量之后实时监测储水箱的当前水位高度,并据此动态设定目标清洁房间内未清洁区域的初始单位面积出水量。
14.优选地,所述根据目标清洁房间的面积和储水箱的初始水位高度判断智能拖地机的储水箱是否需要添水具体包括如下步骤:
15.s21:将目标清洁房间的面积与预置的各种清洁面积对应的储水箱需求储水量进行匹配,从中筛选出目标清洁房间对应的储水箱需求储水量;
16.s22:获取智能拖地机对应储水箱的底面积,进而将目标清洁房间对应的储水箱需求储水量和智能拖地机对应储水箱的底面积通过储水箱需求水位高度计算公式得到目标清洁房间对应的储水箱需求水位高度;
17.s23:将储水箱的初始水位高度与目标清洁房间对应的储水箱需求水位高度进行对比,若储水箱的初始水位高度大于或等于目标清洁房间对应的储水箱需求水位高度,则判断智能拖地机的储水箱不需要添水,反之,则判断智能拖地机的储水箱需要添水。
18.优选地,所述添水操作具体为将智能拖地机内储水箱的初始水位高度添加至需求水位高度。
19.优选地,所述基于目标清洁房间的清洁日志和面积对智能拖地机在目标清洁房间的初始单位面积出水量进行设定对应的具体设定过程如下:
20.s31:从目标清洁房间的清洁日志中提取上次清洁日期,并将其与当前日期进行对比,获取目标清洁房间当前清洁对应的清洁间隔时长;
21.s32:将目标清洁房间当前清洁对应的清洁间隔时长与设置的各种清洁间隔时长对应的清洁力度等级进行匹配,由此匹配出目标清洁房间当前清洁对应的清洁力度等级;
22.s33:将目标清洁房间当前清洁对应的清洁力度等级与清洁数据库中各种清洁力度等级对应的单位面积出水量进行对比,由此提取出目标清洁房间当前清洁对应清洁力度等级所属的单位面积出水量,将其记为目标清洁房间对应的第一备选单位面积出水量;
23.s34:基于目标清洁房间的面积和智能拖地机内储水箱的操作水位高度,计算目标清洁房间对应的第二备选单位面积出水量;
24.s35:将目标清洁房间对应的第一备选单位面积出水量与第二备选单位面积出水
量进行对比,若第一备选单位面积出水量大于第二备选单位面积出水量,则将第二备选单位面积出水量作为智能拖地机在目标清洁房间的初始单位面积出水量,若第一备选单位面积出水量小于第二备选单位面积出水量,则将第一备选单位面积出水量作为智能拖地机在目标清洁房间的初始单位面积出水量,若第一备选单位面积出水量等于第二备选单位面积出水量,则将第一备选单位面积出水量或第二备选单位面积出水量作为智能拖地机在目标清洁房间的初始单位面积出水量。
25.优选地,所述操作水位高度具体是指当判断智能拖地机的储水箱不需要添水时,将储水箱的初始水位高度作为操作水位高度,当判断智能拖地机的储水箱需要添水时,将储水箱的需求水位高度作为操作水位高度。
26.优选地,所述根据采集的当前待拖地区域图像进行当前待拖地区域的实际单位面积出水量调控具体执行步骤参照如下:
27.s51:从采集的当前待拖地区域图像中分别提取污渍表观特征、污渍状态类型和污渍轮廓;
28.s52:将提取的污渍表观特征与预定义的各种污渍类别对应的污渍表观特征进行匹配,从中筛选出匹配成功的污渍类别作为当前待拖地区域对应的污渍类别;
29.s53:将当前待拖地区域对应的污渍类别和污渍状态类型与清洁数据库中各种污渍类别在各种污渍状态类型下的脏污呈现度进行匹配,由此得到当前待拖地区域对应的脏污呈现度;
30.s54:基于提取的污渍轮廓获取当前待拖地区域对应的污渍面积;
31.s55:根据当前待拖地区域对应的脏污呈现度和污渍面积评估当前待拖地区域对应的脏污程度指数,其评估公式为fi表示为当前待拖地区域对应的脏污程度指数,s
污
表示为当前待拖地区域对应的污渍面积,s表示为目标清理房间的面积,λ表示为当前待拖地区域对应的脏污呈现度;
32.s56:获取目标清洁房间对应的地板材质,并将其与设置的各种地板材质对应的吸污能力指数进行对比,从中筛选出目标清洁房间对应的地板吸污能力指数;
33.s57:根据当前待拖地区域对应的脏污程度指数和目标清洁房间对应的地板吸污能力指数统计当前待拖地区域对应的清洁难度指数;
34.s58:将当前待拖地区域对应的清洁难度系数与清洁数据库中各种清洁难度系数对应的实际单位面积出水量进行对比,进而从中匹配出当前待拖地区域对应的实际单位面积出水量。
35.优选地,所述当前待拖地区域对应的清洁难度指数计算公式为ci表示为当前待拖地区域对应的清洁难度指数,si表示为目标清洁房间对应的地板吸污能力指数,e表示为自然常数,a、b分别表示为脏污程度指数、地板吸污能力指数对应的权重因子。
36.优选地,所述污渍状态类型包括液态和固态。
37.优选地,所述动态设定目标清洁房间内未清洁区域的初始单位面积出水量对应的
具体设定方法包括:
38.s61:根据智能拖地机当前拖地位置获取目标清洁房间内已清洁区域的面积;
39.s62:通过非接触式液位传感器监测储水箱的当前水位高度,并根据智能拖地机对应储水箱的当前水位高度和底面积计算智能拖地机内储水箱的剩余水量,其计算公式为δq=s
底
*h,δq表示为智能拖地机内储水箱的剩余水量,s
底
表示为智能拖地机对应储水箱的底面积,h表示为储水箱的当前水位高度;
40.s63:基于目标清洁房间内已清洁区域的面积和智能拖地机内储水箱的剩余水量设定目标清洁房间中未清洁区域的初始单位面积出水量,其设定公式为q表示为目标清洁房间内未清洁区域的单位面积出水量,s0表示为目标清洁房间内已清洁区域的面积。
41.结合上述的所有技术方案,本发明所具备的优点及积极效果为:
42.(1)本发明通过将非接触式液位传感器设置在智能拖地机储水箱的外壁上,并在智能拖地机的顶部设置微型扫描仪和高清摄像头,进而在执行拖地操作前,对目标清洁房间的初始单位面积出水量进行设定,并在拖地过程中利用高清摄像头对当前待拖地区域进行图像采集,由此根据待拖地区域图像进行当前待拖地区域的实际单位面积出水量调控,同时实时监测储水箱的当前水位高度,从而据此动态设定目标清洁房间内未清洁区域的初始单位面积出水量,实现了非接触式液位传感器在拖地过程中单位面积出水量动态调控的应用,大大弥补了目前智能拖地机内非接触式液位传感器的应用过于简单、实用性不足的缺陷,在一定程度上提升了非接触式液位传感器应用的深度,同时也克服了当前拖地过程中智能拖地机单位面积出水量调控存在的不足,一方面提高了清洁效果,另一方面不仅避免了水资源的浪费,还能提高拖地效率,具有实用性强的特点。
43.(2)本发明在由智能拖地机执行拖地操作前,首先进行智能拖地机的储水箱是否需要添水判断,并在判断之后根据判断结果执行添水操作,避免出现储水箱内的储水量不足以支撑目标清洁房间的拖地用水需求情况的发生,有利于降低智能拖地机在拖地过程中半途添水的发生率,为拖地效率的提高提供相应的辅助保障。
44.(3)本发明在对目标清洁房间的初始单位面积出水量进行设定过程中,综合了智能拖地机内储水箱的操作水位和目标清洁房间的清洁间隔时长两个维度进行初始单位面积出水量设定,该设定方式能够在匹配智能拖地机内储水箱的操作水位支撑整个目标清洁房间的拖地用水需求情况下满足目标清洁房间当前清洁对应清洁力度等级的用水需求,实现了初始单位面积出水量的智能灵活性设定,从而能够有效提高设定结果的精准度,使得设定结果与目标清洁房间的清洁用水需求匹配度更高。
附图说明
45.利用附图对本发明作进一步说明,但附图中的实施例不构成对本发明的任何限制,对于本领域的普通技术人员,在不付出创造性劳动的前提下,还可以根据以下附图获得其它的附图。
46.图1为本发明的方法实施步骤流程图。
具体实施方式
47.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
48.参照图1所示,一种基于非接触式液位传感器的液位监测方法,包括以下步骤:
49.s1.监测设备设置:在智能拖地机的储水箱外壁上设置非接触式液位传感器,在智能拖地机的顶部设置微型扫描仪和高清摄像头;
50.s2.储水箱添水判断:智能拖地机在执行拖地操作前通过微型扫描仪对目标清洁房间进行扫描,得到目标清洁房间的面积,并利用非接触式液位传感器对智能拖地机的储水箱进行初始水位高度监测,进而根据目标清洁房间的面积和储水箱的初始水位高度判断智能拖地机的储水箱是否需要添水,若判断需要添水,则执行添水操作后再执行步骤s3,其中添水操作具体为将智能拖地机内储水箱的初始水位高度添加至需求水位高度,若判断不需要添水,则直接执行步骤s3;
51.上述中判断智能拖地机的储水箱是否需要添水对应的具体判断方法包括如下步骤:
52.s21:将目标清洁房间的面积与预置的各种清洁面积对应的储水箱需求储水量进行匹配,从中筛选出目标清洁房间对应的储水箱需求储水量;
53.s22:获取智能拖地机对应储水箱的底面积,进而将目标清洁房间对应的储水箱需求储水量和智能拖地机对应储水箱的底面积通过储水箱需求水位高度计算公式得到目标清洁房间对应的储水箱需求水位高度;
54.s23:将储水箱的初始水位高度与目标清洁房间对应的储水箱需求水位高度进行对比,若储水箱的初始水位高度大于或等于目标清洁房间对应的储水箱需求水位高度,则判断智能拖地机的储水箱不需要添水,反之,则判断智能拖地机的储水箱需要添水;
55.本发明实施例在由智能拖地机执行拖地操作前,首先进行智能拖地机的储水箱是否需要添水判断,并在判断之后根据判断结果执行添水操作,避免出现储水箱内的储水量不足以支撑目标清洁房间的拖地用水需求情况的发生,有利于降低智能拖地机在拖地过程中半途添水的发生率,为拖地效率的提高提供相应的辅助保障;
56.s3.初始单位面积出水量设定:从智能拖地机后台调取目标清洁房间的清洁日志和拖地路线,并基于目标清洁房间的清洁日志和面积对智能拖地机在目标清洁房间的初始单位面积出水量进行设定,其具体设定过程如下:
57.s31:从目标清洁房间的清洁日志中提取上次清洁日期,并将其与当前日期进行对比,获取目标清洁房间当前清洁对应的清洁间隔时长;
58.s32:将目标清洁房间当前清洁对应的清洁间隔时长与设置的各种清洁间隔时长对应的清洁力度等级进行匹配,由此匹配出目标清洁房间当前清洁对应的清洁力度等级,其中清洁间隔时长越长,其匹配的清洁力度等级越高;
59.s33:将目标清洁房间当前清洁对应的清洁力度等级与清洁数据库中各种清洁力
度等级对应的单位面积出水量进行对比,由此提取出目标清洁房间当前清洁对应清洁力度等级所属的单位面积出水量,将其记为目标清洁房间对应的第一备选单位面积出水量;
60.s34:基于目标清洁房间的面积和智能拖地机内储水箱的操作水位高度,计算目标清洁房间对应的第二备选单位面积出水量,其具体计算过程为将智能拖地机内储水箱的操作水位高度与储水箱的底面积相乘,得到智能拖地机内储水箱的水量,再将其除以目标清洁房间的面积得到目标清洁房间对应的第二备选单位面积出水量;
61.需要说明的是,上述中操作水位高度具体是指当判断智能拖地机的储水箱不需要添水时,将储水箱的初始水位高度作为操作水位高度,当判断智能拖地机的储水箱需要添水时,将储水箱的需求水位高度作为操作水位高度;
62.s35:将目标清洁房间对应的第一备选单位面积出水量与第二备选单位面积出水量进行对比,若第一备选单位面积出水量大于第二备选单位面积出水量,表明若以第一备选单位面积出水量进行初始单位面积出水量设定,则此时智能拖地机内储水箱的水量就不足以支撑整个目标清洁房间的拖地用水需求,这里将第二备选单位面积出水量作为智能拖地机在目标清洁房间的初始单位面积出水量,若第一备选单位面积出水量小于第二备选单位面积出水量,表明以第一备选单位面积出水量进行初始单位面积出水量设定既可以满足整个目标清洁房间的拖地用水需求又可以满足目标清洁房间对应清洁力度等级的需求,同时还节约了用水量,此时将第一备选单位面积出水量作为智能拖地机在目标清洁房间的初始单位面积出水量,若第一备选单位面积出水量等于第二备选单位面积出水量,则将第一备选单位面积出水量或第二备选单位面积出水量作为智能拖地机在目标清洁房间的初始单位面积出水量;
63.本发明实施例在对目标清洁房间的初始单位面积出水量进行设定过程中,综合了智能拖地机内储水箱的操作水位和目标清洁房间的清洁间隔时长两个维度进行初始单位面积出水量设定,该设定方式能够在匹配智能拖地机内储水箱的操作水位支撑整个目标清洁房间的拖地用水需求情况下满足目标清洁房间当前清洁对应清洁力度等级的用水需求,实现了初始单位面积出水量的智能灵活性设定,从而能够有效提高设定结果的精准度,使得设定结果与目标清洁房间的清洁用水需求匹配度更高;
64.s4.当前待拖地区域图像采集:智能拖地机在按照调取的目标清洁房间拖地路线和设定的初始单位面积出水量执行拖地操作过程中,实时由高清摄像头对当前待拖地区域进行图像采集;
65.s5.实际单位面积出水量调控:根据采集的当前待拖地区域图像进行当前待拖地区域的实际单位面积出水量调控,具体调控执行步骤参照如下:
66.s51:从采集的当前待拖地区域图像中分别提取污渍表观特征、污渍状态类型和污渍轮廓,其中污渍表观特征包括污渍颜色、形状等,污渍污渍状态类型包括液态和固态;
67.s52:将提取的污渍表观特征与预定义的各种污渍类别对应的污渍表观特征进行匹配,从中筛选出匹配成功的污渍类别作为当前待拖地区域对应的污渍类别;
68.上述中污渍类别包括但不限于油脂类污渍、色素酸类污渍、蛋白质类污渍、色素类污渍等;
69.s53:将当前待拖地区域对应的污渍类别和污渍状态类型与清洁数据库中各种污渍类别在各种污渍状态类型下的脏污呈现度进行匹配,由此得到当前待拖地区域对应的脏
污呈现度;
70.s54:基于提取的污渍轮廓获取当前待拖地区域对应的污渍面积;
71.s55:根据当前待拖地区域对应的脏污呈现度和污渍面积评估当前待拖地区域对应的脏污程度指数,其评估公式为fi表示为当前待拖地区域对应的脏污程度指数,s
污
表示为当前待拖地区域对应的污渍面积,s表示为目标清理房间的面积,λ表示为当前待拖地区域对应的脏污呈现度;
72.在一个具体实施例中,脏污呈现度和污渍面积对脏污程度指数的影响均是正影响;
73.s56:获取目标清洁房间对应的地板材质,并将其与设置的各种地板材质对应的吸污能力指数进行对比,从中筛选出目标清洁房间对应的地板吸污能力指数;
74.需要说明的是上述提到的地板材质包括但不限于瓷砖、大理石、实木、水泥等;
75.s57:根据当前待拖地区域对应的脏污程度指数和目标清洁房间对应的地板吸污能力指数统计当前待拖地区域对应的清洁难度指数,其计算公式为ci表示为当前待拖地区域对应的清洁难度指数,si表示为目标清洁房间对应的地板吸污能力指数,e表示为自然常数,a、b分别表示为脏污程度指数、地板吸污能力指数对应的权重因子;
76.在一个具体实施例中,脏污程度指数和地板吸污能力指数对清洁难度指数的影响均是正影响;
77.优选地,本发明在进行当前待拖地区域的清洁难度系数评估过程中综合了当前待拖地区域的脏污程度状况和地板吸污能力状况两个方面进行评估,有效规避了单一从当前待拖地区域的脏污程度方面进行清洁难度系数评估造成了评估过于片面的缺陷,进而能够有利于提高评估结果的精准可靠度;
78.s58:将当前待拖地区域对应的清洁难度系数与清洁数据库中各种清洁难度系数对应的实际单位面积出水量进行对比,进而从中匹配出当前待拖地区域对应的实际单位面积出水量;
79.s6.未清洁区域初始单位面积出水量设定:在调控当前待拖地区域的实际单位面积出水量之后实时监测储水箱的当前水位高度,并据此动态设定目标清洁房间内未清洁区域的初始单位面积出水量,具体设定方法包括:
80.s61:根据智能拖地机当前拖地位置获取目标清洁房间内已清洁区域的面积;
81.s62:通过非接触式液位传感器监测储水箱的当前水位高度,并根据智能拖地机对应储水箱的当前水位高度和底面积计算智能拖地机内储水箱的剩余水量,其计算公式为δq=s
底
*h,δq表示为智能拖地机内储水箱的剩余水量,s
底
表示为智能拖地机对应储水箱的底面积,h表示为储水箱的当前水位高度;
82.s63:基于目标清洁房间内已清洁区域的面积和智能拖地机内储水箱的剩余水量
设定目标清洁房间中未清洁区域的初始单位面积出水量,其设定公式为q表示为目标清洁房间内未清洁区域的单位面积出水量,s0表示为目标清洁房间内已清洁区域的面积。
83.本发明在实际实施过程中还用到了清洁数据库,其用于存储各种清洁间隔时长对应的清洁力度等级,存储各种清洁力度等级对应的单位面积出水量,存储各种污渍类别对应的污渍表观特征,存储各种污渍类别在各种污渍状态类型下的脏污呈现度,并存储各种清洁难度系数对应的实际单位面积出水量。
84.本发明实施例通过将非接触式液位传感器设置在智能拖地机储水箱的外壁上,并在智能拖地机的顶部设置微型扫描仪和高清摄像头,进而在执行拖地操作前,对目标清洁房间的初始单位面积出水量进行设定,并在拖地过程中利用高清摄像头对当前待拖地区域进行图像采集,由此根据待拖地区域图像进行当前待拖地区域的实际单位面积出水量调控,同时实时监测储水箱的当前水位高度,从而据此动态设定目标清洁房间内未清洁区域的初始单位面积出水量,实现了非接触式液位传感器在拖地过程中单位面积出水量动态调控的应用,大大弥补了目前智能拖地机内非接触式液位传感器的应用过于简单、实用性不足的缺陷,在一定程度上提升了非接触式液位传感器应用的深度,同时也克服了当前拖地过程中智能拖地机单位面积出水量调控存在的不足,一方面提高了清洁效果,另一方面不仅避免了水资源的浪费,还能提高拖地效率,具有实用性强的特点。
85.以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1