一种基于交替振幅方波的干涉式光纤陀螺调制方法
1.本发明涉及光纤陀螺技术领域,尤其涉及一种基于交替振幅方波的干涉式光纤陀螺调制方法。
背景技术:
2.光纤陀螺是一种基于sagnac效应的角速率传感器,其工艺相对简单、抗冲击性强、动态范围大、体积小、测量精度高,已广泛应用于卫星、导弹、船舶及潜艇导航等领域。光纤陀螺的增益链系数指的是光纤陀螺的反馈回路的系数,它的大小决定了从解调出的角速度信号的数字量转换为反馈相位φf的倍率,该系数的稳定性对光纤陀螺的性能指标有重要影响。
3.然而,增益链系数对部分环境参数敏感。例如温度的变化会导致该系数变化,从而导致光纤陀螺的性能指标劣化。为稳定增益链系数,对于使用方波调制技术的光纤陀螺而言,通常的做法是利用数模转换器在数字相位台阶复位前后产生的固定的相位差"2π"来确定增益链系数的变化。这种做法的缺点是需要等待数字相位台阶复位,不发生复位时无法确定增益链系数的变化。数字相位台阶复位的频率与陀螺的角速率有关,当角速率较小时,数字相位台阶复位的频率很慢,不能实时追踪增益链系数的变化。
技术实现要素:
4.有鉴于此,本发明提供了一种基于交替振幅方波的干涉式光纤陀螺调制方法,以解决现有技术中增益链系数对部分环境参数敏感而导致光纤陀螺的性能指标劣化,和数字相位台阶不发生复位时无法确定增益链系数的变化的问题。
5.本发明提供了一种基于交替振幅方波的干涉式光纤陀螺调制方法,包括:
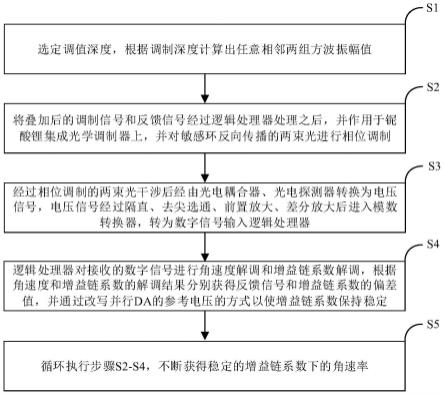
6.s1选定调值深度a,根据所述调制深度a计算出任意相邻两组方波振幅值;
7.s2将叠加后的调制信号和反馈信号经过逻辑处理器处理之后,并作用于铌酸锂集成光学调制器上,并对光纤环反向传播的两束光进行相位调制;
8.s3经过相位调制的所述两束光干涉后经由光电耦合器、光电探测器转换为电压信号,所述电压信号经过隔直、去尖选通、前置放大、差分放大后进入模数转换器,转为数字信号输入所述逻辑处理器;
9.s4所述逻辑处理器对接收的所述数字信号进行角速度解调和增益链系数解调,根据角速度解调结果计算所述反馈信号,根据所述增益链系数解调结果计算所述增益链系数的偏差值,并通过改写并行da的参考电压的方式以使所述增益链系数保持稳定;
10.s5循环执行步骤s2-s4,不断获得稳定的所述增益链系数下的角速率。
11.进一步地,所述s1中任意相邻两组方波振幅值的计算,包括:
12.若调值深度为a,则振幅较小的方波的幅值是
±
a,振幅较大的方波的幅值是
±
(2π-a)。
13.进一步地,所述s1中任意相邻两组方波振幅值是预先设定的值。
14.进一步地,所述两组方波振幅值是交替排布的。
15.进一步地,所述s5包括:
16.假设调制信号的周期t=2/fe,在t
±
nt∈[0,1/2fe)时,记为状态1;t
±
nt∈[1/2fe,1/fe)时,记为状态2;t
±
nt∈[1/fe,3/2fe)时,记为状态3;t
±
nt∈[3/2fe,2/fe)时,记为状态4,角速度信号进入所述逻辑处理器;
[0017]
对于角速度解调,在状态2和状态3对采样信号进行累加,在状态1和状态4对采样信号进行累减,经过一个完整的的周期的累加累减后,获得与角速率的偏差值成比例的数字量,角速率的偏差值大于0,获得正确的所述增益链系数;
[0018]
对于增益链系数解调,在状态3和状态4对采样信号进行累加,在状态1和状态2对采样信号进行累减,经过一个完整的的周期的累加累减后,获得增益链系数的偏差值成比例的数字量。
[0019]
进一步地,所述调制信号的周期为2/fe的前提是系统本征频率为fe。
[0020]
进一步地,所述s5,还包括:
[0021]
在所述状态1和状态2下会出现负斜率,在所述状态3和状态4下斜率翻转,使得一个完整解调周期内被纳入累加累减范围的数据的总和不发生偏移。
[0022]
本发明与现有技术相比存在的有益效果是:
[0023]
1.本发明通过解调出增益链系数的变化量,能够消除由于温度、湿度等物理环境改变引起的增益链系数误差,有效提高光纤陀螺的性能。
[0024]
2.本发明对增益链系数的解调频率不受角速率大小的影响,克服了传统的方波调制在利用2π复位解调增益链系数的方法时受制于角速率大小的缺陷。
[0025]
3.相比使用四态调制技术的陀螺,本发明能够解决在四态调制下由于干涉信号在相邻脉冲尖峰之间出现负斜率从而导致的采样值不能完全对称的问题。能够在一个完整周期内找到采样值的对称点,从而使得角速率解调和增益链系数解调获取的数据更加准确。
[0026]
4.本发明的实施不需要对光纤陀螺的硬件部分做出改动,仅需要对程序进行部分修改即可实现。
附图说明
[0027]
为了更清楚地说明本发明中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
[0028]
图1是本发明一种基于交替振幅方波的干涉式光纤陀螺调制方法的流程图;
[0029]
图2是本发明提供的光纤陀螺光路与电路结构示意图;
[0030]
图3是本发明提供的两个周期的交替振幅调制的波形及时序示意图;
[0031]
图4是本发明提供的角速率的偏差值大于0且增益链系数无偏差时,总的相位差信
号引起干涉光光强变化的示意图;
[0032]
图5是本发明提供的增益链系数偏小且角速率的偏差值为0时,总的相位差信号引起干涉光光强变化的示意图;
[0033]
图6是本发明提供的四态调制与本发明所述调制方法在实际采样值上的对比示意图。
具体实施方式
[0034]
以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本发明实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本发明。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本发明的描述。
[0035]
下面将结合附图详细说明根据本发明的一种基于交替振幅方波的干涉式光纤陀螺调制方法。
[0036]
图1是本发明公开提供的一种基于交替振幅方波的干涉式光纤陀螺调制方法的流程图。
[0037]
图2是本发明提供的光纤陀螺光路与电路结构示意图。
[0038]
如图1所示,该干涉式光纤陀螺调制方法包括:
[0039]
s1选定调值深度a,根据调制深度a计算出任意相邻两组方波振幅值;
[0040]
s1中任意相邻两组方波振幅值是预先设定的值。
[0041]
a是设定的,根据a计算出"
±
a"与"
±
"("2π-a"),"
±
a"与"
±
"("2π-a")是振幅。
[0042]
s1中任意相邻两组方波振幅值的计算,包括:
[0043]
若调值深度为a,则振幅较小的方波的幅值是
±
a,振幅较大的方波的幅值是
±
(2π-a)。
[0044]
图3是本发明提供的两个周期的交替振幅调制的波形及时序示意图。
[0045]
两组方波振幅值是交替排布的。
[0046]
s2将叠加后的调制信号和反馈信号经过逻辑处理器处理之后,并作用于铌酸锂集成光学调制器上,并对光纤环反向传播的两束光进行相位调制;
[0047]
s3经过相位调制的两束光干涉后经由光电耦合器、光电探测器转换为电压信号,电压信号经过隔直、去尖选通、前置放大、差分放大后进入模数转换器,转为数字信号输入逻辑处理器;
[0048]
s4逻辑处理器对接收的数字信号进行角速度解调和增益链系数解调,根据角速度解调结果计算反馈信号,根据增益链系数解调结果计算增益链系数的偏差值,并通过改写并行da的参考电压的方式以使增益链系数保持稳定;
[0049]
s5循环执行步骤s2-s4,不断获得稳定的增益链系数下的角速率。
[0050]
图4是本发明提供的角速率的偏差值大于0且增益链系数无偏差时,总的相位差信号引起干涉光光强变化的示意图。
[0051]
图5是本发明提供的增益链系数偏小且角速率的偏差值为0时,总的相位差信号引起干涉光光强变化的示意图。
[0052]
图6是本发明提供的四态调制与本发明调制方法在实际采样值上的对比示意图。
[0053]
s5包括:
[0054]
假设调制信号的周期t=2/fe,在t
±
nt∈[0,1/2fe)时,记为状态1;t
±
nt∈[1/2fe,1/fe)时,记为状态2;t
±
nt∈[1/fe,3/2fe)时,记为状态3;t
±
nt∈[3/2fe,2/fe)时,记为状态4,角速度信号进入逻辑处理器;
[0055]
对于角速度解调,在状态2和状态3对采样信号进行累加,在状态1和状态4对采样信号进行累减,经过一个完整的的周期的累加累减后,获得与角速率的偏差值成比例的数字量,角速率的偏差值大于0,获得正确的增益链系数;
[0056]
对于增益链系数解调,在状态3和状态4对采样信号进行累加,在状态1和状态2对采样信号进行累减,经过一个完整的的周期的累加累减后,获得增益链系数的偏差值成比例的数字量。
[0057]
调制信号的周期为2/fe的前提是系统本征频率为fe。
[0058]
在状态1和状态2下会出现负斜率,在状态3和状态4下斜率翻转,使得一个完整解调周期内被纳入累加累减范围的数据的总和不发生偏移。
[0059]
在四态调制下,干涉信号在相邻脉冲尖峰之间会出现负斜率,对于任何的调制方法,实际的陀螺程序都不可能选取采样区间内所有的采样点进行累加或累减,而是选取一个采样区间内的一部分内的数据进行累加或累减,这就导致了在负斜率下,被纳入累加累减范围的数据的绝对值整体偏小,假设使用了四态调制的调制信号的周期为2/fe=t,在t
±
nt∈[0,1/2fe)时,记为状态1;t
±
nt∈[1/2fe,1/fe)时,记为状态2;t
±
nt∈[1/fe,3/2fe)时,记为状态3;t
±
nt∈[3/2fe,2/fe)时,记为状态4。四态调制和本发明的调制方法在角速率误差为0且增益链系数准确的情况下干涉信号的示意图如图6所示,本发明的调制方法在状态1和状态2下会出现负斜率,然而状态3和状态4下斜率翻转,从而使得一个完整解调周期内被纳入累加累减范围的数据的总和不发生偏移,使得角速率解调和增益链系数解调获取的数据更加准确。
[0060]
本发明提出一种基于交替振幅方波的干涉式光纤陀螺调制方法,在传统方波调制的基础上,使任意相邻的两组方波的振幅按照设定的值交替排布,从而能够利用余弦函数的周期性与奇偶性快速确定增益链系数的变化。
[0061]
上述所有可选技术方案,可以采用任意结合形成本技术的可选实施例,在此不再一一赘述。
[0062]
应理解,上述实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本发明实施例的实施过程构成任何限定。
[0063]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施
例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1