一种基于同轴度标准器轴线角摆测量装置及补偿方法
1.本发明涉及一种测量装置及补偿方法,属于转台轴线角摆误差测量领域。
背景技术:
2.大型高速精密回转装备的测量与装配精度直接决定整机可靠性、稳定性和综合性能。航空发动机的故障主要源于振动和碰摩,而振动和碰摩的发生主要是由于装配后的各级部件不同轴、不平衡量超差等因素导致。以美军第五代战机f22配备的f119涡扇航空发动机为例,核心机是航空发动机装配最复杂的核心单元,其装配精度对航空发动机性能及寿命有至关重要的影响。据报道,美国空军两年内,由于碰摩引起的航空发动机涡轮封严环裂纹导致4架f16战斗机失事,迫使339台航空发动机直接或间接停飞。航空发动机和航天发动机盘轴装配同轴度测量技术与仪器是解决振动故障、提升无故障时间的“利器”。由转子装配体同轴度误差导致振动在高速运转时会放大100至1000倍,装配时消除同轴度造成的偏摆可以很大程度上减小动平衡的压力。所以,作为提升航空发动机和航天弹用发动机性能的关键技术,航空发动机和航天弹用发动机盘轴装配同轴度的精密测量越来越受到重视,并且成为研究的热点。目前,国内大型回转装备同轴度测量主要基于超精密同轴度测量仪,包括单通道同轴度测量仪、双通道同轴度测量仪、四通道同轴度测量仪、五通道同轴度测量仪等。这些装置均离不开核心单元超精密转台来建立精密回转基准。由于超精密转台的加工和安装会引入误差,故需要对超精密转台进行角摆误差补偿,提高同轴度测量校准精度。
技术实现要素:
3.本发明为解决超精密转台的加工和安装会引入误差的问题,进而提出一种基于同轴度标准器轴线角摆测量装置及补偿方法。
4.本发明为解决上述问题采取的技术方案是:本发明所述测量装置包括同轴度标准器、电传感器、超精密转台、定位机构和基座;超精密转台和定位机构并排安装在基座上,同轴度标准器安装在超精密转台上,电传感器安装在所述定位机构上,且电传感器与同轴度标准器接触。
5.进一步的,所述定位机构包括水平导轨和竖直导轨;竖直导轨设置在基座上,竖直导轨的下端与基座固定连接,水平导轨安装在竖直导轨上,且水平导轨能沿竖直导轨上下直线移动,电传感器安装在水平导轨上。
6.本发明所述补偿方法为:
7.步骤一、将同轴度标准器放在超精密转台的中心,保证电传感器能够测量到同轴度标准器的轮廓;
8.步骤二、移动竖直导轨使电传感器移动到同轴度标砖器的径向截面,超精密转台转动,电传感器采集同轴度标准器径向面轮廓信息,电传感器测量同轴度标准器多个截面的跳动,记录截面相对超精密转台的高度数据,并拟合出截面的偏心值;
9.步骤三、基于多个截面的偏心,拟合出同轴度标准器的实际回转轴线;
10.步骤四、同轴度标准器的实际回转轴线的倾斜角即为超精密转台的角摆误差,基于超精密转台的角摆误差和测量截面的高度,对角摆误差进行补偿。
11.进一步的,步骤二中根据截面跳动数据,可通过最小二乘法拟合出截面的圆心,具体步骤为:
12.步骤a、设截面圆心坐标为(x
0i
,y
oi
),截面半径为r
0i
,则截面的圆方程为:
[0013][0014]
步骤b、设pi(xi,yi,zi)为被测截面上的点,则其到圆心的距离di为:
[0015][0016]
步骤c、由最小区域圆定义可知,截面圆心参数{x
0i
,y
0i
}需满足:
[0017]
f(x
0i
,y
0i
)=min(max{di}-min{di})
③
;
[0018]
步骤d、对公式
③
采用寻优算法获得截面圆心参数{x
0i
,y
0i
}的最优解,获得截面偏心和偏心角为:
[0019][0020][0021]
公式
④
和
⑤
中ei表示截面偏心,αi表示偏心角;
[0022]
步骤e、通过多个截面的偏心和偏心角拟合出同轴度标准器的实际回转轴线,其方向向量为(a,b,c),则超精密转台的角摆误差为:
[0023][0024]
本发明的有益效果是:本发明基于同轴度标准器,实现超精密转台回转轴线角摆误差的分离,通过测量同轴度标准器多个截面拟合出转台的实际回转轴线,通过求解实际回转轴线的倾斜角得到角摆误差;该方法基于同轴度标准器的高精度加工表面,拟合出回转轴线,保证了在大量程范围内角摆误差测量的准确性,有效保证了同轴度测量装置超精密转台角摆误差的补偿能力。
附图说明
[0025]
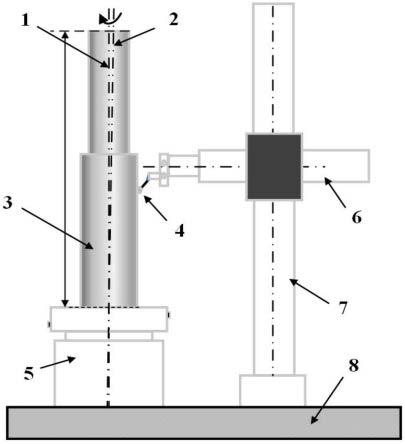
图1是测量装置的结构示意图;
[0026]
图1中,1-同轴度标准器理论回转轴线,2-同轴度标准器实际回转轴线,3-同轴度标准器,4-电传感器,5-超精密转台,6-水平导轨,7-竖直导轨,8-基座。
具体实施方式
[0027]
具体实施方式一:结合图1说明本实施方式,本实施方式所述一种基于同轴度标准器轴线角摆测量装置包括同轴度标准器3、电传感器4、超精密转台5、定位机构和基座8;超精密转台5和定位机构并排安装在基座8上,同轴度标准器3安装在超精密转台5上,电传感器4安装在所述定位机构上,且电传感器4与同轴度标准器3接触。
[0028]
具体实施方式二:结合图1说明本实施方式,本实施方式所述一种基于同轴度标准器轴线角摆测量装置的所述定位机构包括水平导轨6和竖直导轨7;竖直导轨7设置在基座8上,竖直导轨7的下端与基座8固定连接,水平导轨6安装在竖直导轨7上,且水平导轨6能沿竖直导轨7上下直线移动,电传感器4安装在水平导轨6上。
[0029]
具体实施方式三:结合图1说明本实施方式,本实施方式所述一种基于同轴度标准器轴线角摆补偿方法的具体步骤如下:
[0030]
步骤一、将同轴度标准器3放在超精密转台5的中心,保证电传感器4能够测量到同轴度标准器3的轮廓;
[0031]
步骤二、移动竖直导轨7使电传感器4移动到同轴度标砖器3的径向截面,超精密转台5转动,电传感器4采集同轴度标准器3径向面轮廓信息,电传感器4测量同轴度标准器3多个截面的跳动,记录截面相对超精密转台5的高度数据,并拟合出截面的偏心值;
[0032]
步骤三、基于多个截面的偏心,拟合出同轴度标准器3的实际回转轴线2;
[0033]
步骤四、同轴度标准器3的实际回转轴线2的倾斜角即为超精密转台5的角摆误差,基于超精密转台5的角摆误差和测量截面的高度,对角摆误差进行补偿。
[0034]
具体实施方式四:结合图1说明本实施方式,本实施方式所述一种基于同轴度标准器轴线角摆补偿方法的步骤二中根据截面跳动数据,可通过最小二乘法拟合出截面的圆心,具体步骤为:
[0035]
步骤a、设截面圆心坐标为(x
0i
,y
oi
),截面半径为r
0i
,则截面的圆方程为:
[0036][0037]
步骤b、设pi(xi,yi,zi)为被测截面上的点,则其到圆心的距离di为:
[0038][0039]
步骤c、由最小区域圆定义可知,截面圆心参数{x
0i
,y
0i
}需满足:
[0040]
f(x
0i
,y
0i
)=min(max{di}-min{di})
③
;
[0041]
步骤d、对公式
③
采用寻优算法获得截面圆心参数{x
0i
,y
0i
}的最优解,获得截面偏心和偏心角为:
[0042][0043][0044]
公式
④
和
⑤
中ei表示截面偏心,αi表示偏心角;
[0045]
步骤e、通过多个截面的偏心和偏心角拟合出同轴度标准器的实际回转轴线,其方向向量为(a,b,c),则超精密转台5的角摆误差为:
[0046][0047]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰
为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质,在本发明的精神和原则之内,对以上实施例所作的任何简单的修改、等同替换与改进等,均仍属于本发明技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1