一种基于小波分析的海底地震信号在线识别方法与流程
1.本发明涉及海洋地质探测领域的一种海底地震信号识别方法,具体的说是一种基于小波分析的海底地震信号在线识别方法。
背景技术:
2.与声呐浮标、海底地震仪、泊系水听器等海洋地震观测设备相比,移动式海洋地震仪机动性强,覆盖范围广,投放回收成本低,能够很好地完成海底地震的观测任务。并且移动式海洋地震仪能够实时处理观测地震信号,保存地震数据,通过卫星将观测数据传递回来。因此,移动式海洋地震仪得到了广泛应用,成为了海洋地震观测网络的重要组成部分。
3.目前对于地震信号的识别方法主要有sta/lta算法、神经网络法等。sta/lta算法简单快速,但结果粗糙,识别率低,神经网络法识别率高,但运算量很大,对硬件要求比较高,难以在移动式海洋地震仪搭载的控制芯片上使用。这些算法不能兼顾控制芯片的运算量和地震信号的识别率,导致目前海底地震观测工作效率低,漏报错报多,不能很好地完成地震观测任务。
技术实现要素:
4.为了解决上述问题,本发明提供了一种基于小波分析的海底地震信号在线识别方法,解决了运算量和识别率之间的冲突,能够应用在移动式海洋地震仪的控制芯片上,快速准确地识别出地震信号。
5.本发明通过以下技术方案实现:s1、通过移动式海洋地震仪所携带传感器在海底实时观测水声信号s,对实时观测到的水声信号s进行n层小波分解得到水声信号s在各层的小波系数;所述的水声信号s是由传感器按时序间隔采样获得的采样点数据。
6.所述的移动式海洋地震仪及其携带的传感器置于海底水下。
7.s2、对各层的小波系数通过软阈值函数进行阈值去噪处理;s3、用阈值去噪处理过的各层的小波系数进行小波重构得到去噪重构后的水声信号s;s4、采用二进样条小波对去噪重构后的水声信号s进行展开和计算处理获得水声信号s各层的相对功率sk,进而获得水声信号s的相对功率分布;s5、从相对功率分布中第一层的相对功率s1开始,遍历各层的相对功率,验证水声信号s的相对功率分布是否与地震特征匹配:若匹配则判断水声信号s为海底地震信号,否则判断水声信号s不为海底地震信号。
8.所述步骤s1中,小波分解的层数n按照以下公式设定:n = 1 + { ln (f1)
ꢀ–ꢀ
ln(f2) } / ln2其中, f1是移动式海洋地震仪所携带传感器观测的采样频率, f2是期待观测的地震信号的最低频率;若计算出的小波分解的层数n不为整数,则向上取整。
9.每层所述小波系数均包括表示低频部分的近似系数ca和表示高频部分的细节系数cd;在所述步骤s1中,每一层的小波系数中的近似系数ca和细节系数cd均采用单独的软阈值函数进行去噪处理。
10.所述步骤s2中,软阈值函数设置为:当c
k0
≥ m 时,c
k = c
k0
–ꢀ
m当
ꢀ‑
m 《 c
k0 《 m 时,c
k = 0当c
k0
≤
ꢀ‑
m 时,c
k = c
k0 + m其中,c
k0
是待观测信号在阈值去噪前的第 k层下的小波系数集,m是小波系数阈值,每层的软阈值函数都单独选取;ck是阈值去噪后的第 k层下的小波系数集;所述的各层小波系数阈值m按照以下方式设置:m = n * maxmax = max{ | c
k0
| }其中,max是当前第k层下的所有小波系数绝对值的最大值,max{}表示取最大元素函数,max{ | c
k0
| }表示取待观测信号在阈值去噪前的第 k层下的小波系数集中各个元素的绝对值的最大值,n是最大值max的相对系数。
11.所述步骤s4中,采用二进样条小波对去噪重构后的水声信号s进行展开获得各层的子波形,对每层的子波形计算层的相对功率sk,综合所有层的相对功率处理获得水声信号s的相对功率分布。
12.所述步骤s4中,各层的相对功率sk按以下方式进行处理获得:s41、先针对每层小波系数进行处理,计算第k层下所有小波系数平方和的平均值作为第k层的功率sk:s
k = ∑( c
ki )
2 / nk其中,k为层序号,k = 1, 2, 3
…
n;i为第k层下小波系数的序号,nk为第k层下小波系数的总数目,c
ki
为第k层下的第i个小波系数,i = 1, 2, 3
…
nk;s42、接着对所有层的功率按照以下公式进行累加求和得到总功率l1:l
1 = ∑ sks43、将各层的功率根据总功率 l1按照以下公式进行归一化得到各层的初步相对功率p
k :p
k = s
k / l1s44、利用在步骤s1的实时观测前采集的背景信号各层的初步相对功率 nk对步骤s43获得的实时观测水声信号s的各层的初步相对功率 pk进行二次归一化,得到实时观测水声信号s的各层最终的相对功率sk:s
k = p
k / nk其中,sk表示实时观测水声信号s的第k层的相对功率,pk表示实时观测水声信号s的第k层的初步相对功率,nk表示背景信号的第k层的初步相对功率。
13.所述的背景信号是指幅值范围小于预设幅值阈值的信号。
14.所述步骤s5中,具体是建立以下目标函数,按照以下方式进行判断:若相对功率分布中所有相邻两层的相对功率的增长率以及最后两个层的相对功率之和均满足以下公式,则认为相对功率分布与地震特征匹配:kk = s
k+1
ꢀ‑ꢀsk 》 0p = s
n-1 + s
n 》 t * ∑sk其中,sk表示第k层的相对功率,k=1,2,...,n-1,kk表示第k层的相对功率到第k+1层的相对功率的增长率,p表示最后两个层的相对功率之和,t为预设的判断阈值。
15.所述的传感器为振动传感器。
16.实时观测的所述水声信号包含有和地震、海底气枪、船只振动、海洋生物游动等因素有关的信号,通过本发明能够从中提取出地震因素的有效信息,实现准确的识别。
17.本发明将移动式海洋地震仪观测到的声学数据用小波基函数进行多层分解,然后对各层的小波系数进行阈值处理实现去噪效果,接着用处理过的小波系数进行声学数据的小波重构,得到各层下重构后的声学数据,最后计算各层下的相对功率分布并进行判断识别信号类型。
18.本发明通过依次进行的小波分解、软阈值的阈值去噪、小波重构、展开和计算的特定小波相关分析处理了能够用于和地震特征匹配判断的相对功率分布,进而再通过设计的地震特征比较进行快速准确的识别。
19.本发明的优点与有益效果为:1、本发明采用小波分析的方法处理地震数据,计算量适中,运算速度快,适合应用在移动式海洋地震仪搭载的控制芯片上,解决了板载计算机识别地震信号时运算能力不足的问题。
20.2、本发明的方法地震识别率较高,能够有效减少错报漏报的问题,不会丢失原始数据,同时避免了海洋地震仪错报时频繁潜浮造成的续航下降问题。
21.3、本发明快速准确地识别地震信号,并且能够在移动式海洋地震仪搭载的低功率控制芯片上运行,满足了移动式海洋地震仪观测记录地震信号、参与全球地震层析成像的需求。
附图说明
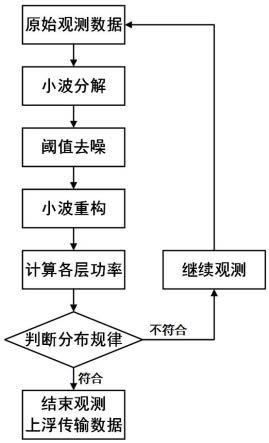
22.图1为本发明的方法流程图;图2为本发明实施例1的实施效果图,结果显示本发明的算法能够准确地识别地震信号,满足移动式海洋地震仪的地震观测需求;图3为本发明实施例2的实施效果图,结果显示本发明的算法能够准确地识别地震信号,满足移动式海洋地震仪的地震观测需求。
具体实施方式
23.下面结合附图,对本发明的具体内容及功能实现过程进行详细阐明。
24.如图1所示,本发明具体实施包括小波分解、阈值去噪、小波重构、计算各层功率、判断分布规律5个核心过程,在移动式海洋地震仪控制芯片的有限算力下,能够快速准确地识别出地震信号。
25.如图1所示,本发明的具体实施过程如下:s1、通过移动式海洋地震仪所携带传感器在海底实时观测水声信号s,对实时观测到的水声信号s进行n层小波分解得到水声信号s在各层的小波系数c,每层小波系数均包括
表示低频部分的近似系数ca和表示高频部分的细节系数cd。
26.具体实施中,设置移动式海洋地震仪,移动式海洋地震仪自身安装有传感器,通过传感器检测获得观测海洋数据。
27.小波分解的层数n按照以下公式设定:n = 1 + { ln (f1)
ꢀ–ꢀ
ln(f2) } / ln2若n不为整数,则向上取整。
28.s2、对各层的小波系数c通过软阈值函数进行去噪处理,其中每一层的小波系数中的近似系数ca和细节系数cd均采用单独的软阈值函数进行阈值去噪处理。软阈值函数设置为:当c
k0
≥ m 时,c
k = c
k0
–ꢀ
m当
ꢀ‑
m 《 c
k0 《 m 时,c
k = 0当c
k0
≤
ꢀ‑
m 时,c
k = c
k0 + m各层的小波系数阈值m按照以下方式设置:m = n * maxmax = max{ | c
k0
| }s3、用阈值去噪处理过的各层的小波系数进行小波重构得到去噪后的水声信号s;s4、采用二进样条小波对去噪重构后的水声信号s进行展开和计算处理,获得水声信号s各层的相对功率 sk,进而获得水声信号s的相对功率分布;具体是采用二进样条小波对去噪重构后的水声信号s进行展开,获得各层的子波形,对每层的子波形计算层的相对功率 sk,综合所有层的相对功率处理获得水声信号s的相对功率分布。
29.各层的相对功率 sk按以下方式进行处理获得:s41、先针对每层小波系数进行处理,计算第k层下所有小波系数平方和的平均值作为第k层的功率sk:s
k = ∑( c
ki )
2 / nk其中,k为层序号,i = 1, 2, 3
…
n;i为第k层下小波系数的序号,nk为第k层下小波系数的总数目,c
ki
为第k层下的第i个小波系数,i = 1, 2, 3
…
nk;s42、接着对所有层的功率按照以下公式进行累加求和得到总功率l1:l
1 = ∑ sks43、将各层的功率根据总功率 l1按照以下公式进行归一化得到各层的初步相对功率 pk:p
k = s
k / l1s44、利用在步骤s1的实时观测前采集的背景信号各层的初步相对功率 nk,对步骤s43获得的实时观测水声信号s的各层的初步相对功率pk进行二次归一化,得到实时观测水声信号s的各层最终的相对功率sk:s
k = p
k / nk其中, sk表示实时观测水声信号s的第k层的相对功率,pk表示实时观测水声信号s的第k层的初步相对功率,nk表示背景信号的第k层的初步相对功率。
30.背景信号各层的初步相对功率 nk是在步骤s1的实时观测前截取一段背景信号,
再按照步骤s1-s3以及步骤s41
‑ꢀ
s43的同样处理过程后得到。
31.s5、从相对功率分布中第一层的相对功率 s1开始,遍历n个层的相对功率,验证水声信号s的相对功率分布是否与地震特征匹配:若匹配则判断水声信号s为海底地震信号,否则判断水声信号s不为海底地震信号。
32.具体是建立以下目标函数,按照以下方式进行判断:若相对功率分布中所有相邻两层的相对功率的增长率以及最后两个层的相对功率之和均满足以下公式,则认为相对功率分布与地震特征匹配:k
k = s
k+1
ꢀ‑ꢀsk 》 0p = s
n-1 + s
n 》 t * ∑sk当观测信号的功率特征满足s5中的两个目标函数时,就可以判断此信号就是地震信号,移动式海洋地震仪立刻上浮至水面,将地震数据通过卫星传输至地面基站。
33.实施例1本实施例的效果如图2所示,以地震p波为例,地震仪能够在控制芯片的有限算力下,快速准确地识别出地震信号。
34.图中两个信号波形分别是两台地震仪在同一时间捕获的水声信号s,1号地震仪和2号地震仪的两台地震仪均为移动式海洋地震仪,是布置在中国南海附近,经过本发明的小波分析算法识别为地震信号,通过查询地震台网的数据,确认这个地震信号为2021年5月22日02时04分11秒发生在青海果洛州玛多县的地震,坐标为(34.59
°
n, 98.34
°
e),震源深度为17km,震级为7.4级。
35.实施例2本实施例的效果如图3所示,以地震p波为例,地震仪能够在控制芯片的有限算力下,快速准确地识别出地震信号。
36.图中两个信号波形分别是两台地震仪在同一时间捕获的水声信号s,1号地震仪和2号地震仪的两台地震仪均为移动式海洋地震仪,也是布置在中国南海附近,经过小波分析算法识别为地震信号,通过查询地震台网的数据,确认这个地震信号为2021年6月3日18时09分57秒发生在印尼马鲁古海的地震,坐标为(0.30
°
n, 126.25
°
e),震源深度为20km,震级为5.9级。
37.采用本发明方法具体实施在2021年4月-7月的中国南海海上地震观测应用中,能有效识别到4级及以上天然地震100多个。
38.结果显示,采用本发明的基于小波分析的海底地震信号在线识别方法能够准确识别地震信号,同时计算量小,速度快,证明了本发明的可靠效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1