一种无人叉车车位角误差校正方法
1.本发明涉及误差校正技术领域,具体涉及了一种无人叉车车位角误差校正方法。
背景技术:
2.无人叉车的车位角为从北向顺时针旋转到叉车的车轴线的夹角,范围为0-360
°
。无人叉车在长期使用过后,由于各种传感器老化等问题,其系统输出的车位角会出现偏差,并且在不同的方位,会存在不同程度的偏差。车位角的误差,会使得无人叉车无法正常运行到指定位置,对用户的正常使用造成影响。
3.目前对于车位角误差的校正,用户无法自行对误差进行校正,当出现误差后,需要重新返厂,进行复杂的原始参数校正,过程周期长,并且实施成本高。
技术实现要素:
4.本发明所解决的技术问题在于提供一种无人叉车车位角误差校正方法,能够降低对无人叉车车位角误差校正成本。
5.本发明提供的基础方案:一种无人叉车车位角误差校正方法,包括以下步骤:
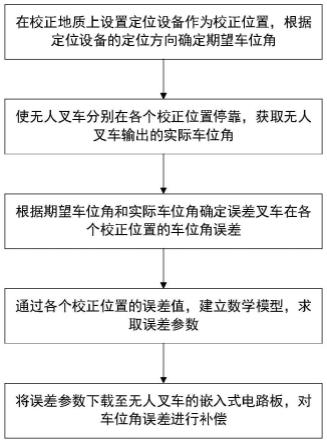
6.s1:设置校正地基,在校正地基上的若干方位设置定位设备确定校正位置,根据定位设备的定位方向确定校正位置的期望车位角;
7.s2:使无人叉车分别在各个校正位置停靠,获取无人叉车在各个校正位置停靠时的输出的实际车位角;
8.s3:根据期望车位角和实际车位角确定误差叉车在各个校正位置的车位角误差;
9.s4:通过各个校正位置的误差值,建立数学模型,求取误差参数;
10.s5:将误差参数下载至无人叉车的嵌入式电路板,对车位角误差进行补偿。
11.本发明的原理及优点在于:通过在校正位置设置定位设备,通过定位设备限定校正时指向的定位方向,以定位设备的定位方向作为无人叉车在校正位置停靠时的期望车位角。之后使无人叉车校正位置进行停靠,输出实际车位角。通过校正地基上多个校正位置的期望车位角和实际车位角,建立数学模型,求取无人叉车的车位角的误差参数,将求取出的误差参数下载至无人叉车的嵌入式电路板中,通过数据补偿的方式对无人叉车在各个方位的误差进行校正。相比于现有技术,无需将无人叉车返厂进行误差校正,用户自行设置校正地基即可完成对无人叉车车位角的误差校正,并且只需要简单设置校正设备和校正方位即可,成本较低。
12.进一步,所述s2包括以下步骤:
13.s2-1:使无人叉车在各个校正位置处停靠三次,取三次停靠的实际车位角平均值;
14.所述s3中,以期望车位角和实际车位角平均值确定误差值。
15.获取实际车位角时,使无人叉车在同一个校正位置停靠三次,获取三次实际车位角,对三次获取的实际车位角求取平均值,以平均值和期望车位角求取误差值。提高误差值的准确性。
16.进一步,所述s1包括以下步骤:
17.s1-1:设置两个水平面上的校正地基,包括第一地基和第二地基;
18.s1-2:在第一地基和第二地基上分别设置若干定位角铁作为校正位置。
19.设置两个校正地基,在两个校正地基上分别设置定位角铁作为定位设备,通过定位角铁指向的方向作为定位方向,通过两个校正地基上设置定位设备,减少统一校正地基上的定位设备密度,方便无人叉车行驶进行停靠。
20.进一步,所述s1-2还包括以下步骤:
21.s1-2-1:在第一地基的四个方位,分别设置定位角铁作为校正位置,定位方向与北向的夹角分别为0
°
、90
°
、180
°
、270
°
;
22.s1-2-2:在第二地基的四个方位,分别设置定位角铁作为校正位置,定位方向与北向的夹角分别为45
°
、135
°
、225
°
、315
°
;
23.所述s2中,使无人叉车在角铁靠座处进行停靠。
24.设置八个方位作为校正位置,无人叉车在停靠时,在定位角铁处停靠,使边角贴靠角铁直角的直角处,便能够使无人叉车的中轴线与定位方向重合,若是无人叉车车位角没有误差,输出的实际车位角便等于期望车位角。
25.进一步,所述s4包括以下步骤:
26.s4-1:对各个校正位置建立关于误差和误差参数的误差数学模型;
27.s4-2:根据各个校正位置的误差数学模型,建立误差矩阵;
28.s4-3:求取误差矩阵的最优结果。
29.通过建立各个校正位置,关于误差和误差参数的误差数学模型,建立误差矩阵,求得误差参数的最优解,从而使得求得的误差参数适用于各个方位。
30.进一步,所述s3包括以下步骤:
31.s3-1:设定无人叉车在第一校正位置的误差为e1,其表示为:
32.e1=h
1-h
′1ꢀꢀ
(1)
33.h1为第一校正位置的期望车位角;
34.h
′1为无人叉车在第一校正位置停靠三次,求取的实际车位角平均值;
35.所述s4包括以下步骤:
36.s4-1:对第一校正位置的误差e1构建误差数学模型,其表示为:
37.e1=a0+a1cosh
′1+a2sinh
′1+a3cos2h
′1+a4sin2h
′1+a5cos3h
′1+a6sin3h
′1ꢀꢀ
(2)
38.式中a0、a1、a2、a3、a4、a5、a6为待求取的误差参数;
39.s4-2:得到其余校正位置的误差参数模型写为:
[0040][0041]
s4-3:将公式(3)简写为:
[0042]
e=ka
ꢀꢀ
(4)
[0043]
公式(4)中:
[0044]
为八个校正位置的车位角误差矩阵;
[0045]
为八个校正位置的三角函数参数矩阵;
[0046]
为误差参数组成的待求取的误差参数矩阵;
[0047]
根据公式(4)求得误差矩阵最优化结果:
[0048]
a=inv(k
t
k)k
teꢀꢀ
(5)
[0049]
公式(5)中k
t
为矩阵k的转置;
[0050]
inv(k
t
k)为矩阵k的转置乘以矩阵k后的矩阵求逆运算。
[0051]
通过
[0052]
进一步,所述s5包括以下步骤:
[0053]
s5-1:将误差参数a0、a1、a2、a3、a4、a5、a6下载至无人叉车的嵌入式电路板;
[0054]
s5-2:通过公式进行补偿:
[0055]
h=h
′
+a0+a1cosh
′
+a3cos2h
′
+a4sin2h
′
+a5cos3h
′
+a6sin3h
′ꢀꢀ
(6)
[0056]
公式(6)中h为校正后的车位角,h
′
为校正前的车位角。
[0057]
将误差求得的误差参数下载至无人叉车的电路板,通过补偿公式进行补偿。
附图说明
[0058]
图1为本发明一种无人叉车车位角误差校正方法实施例的流程示意图;
[0059]
图2位本发明一种无人叉车车位角误差校正方法实施例的。
具体实施方式
[0060]
下面通过具体实施方式进一步详细说明:
[0061]
实施例基本如附图1所示:
[0062]
具体实施过程如下:一种无人叉车车位角误差校正方法,包括以下步骤:
[0063]
s1:设置校正地基,在校正地基上的若干方位设置定位设备确定校正位置,根据定位设备的定位方向确定校正位置的期望车位角;
[0064]
s2:使无人叉车分别在各个校正位置停靠,获取无人叉车在各个校正位置停靠时的输出的实际车位角;
[0065]
s3:根据期望车位角和实际车位角确定误差叉车在各个校正位置的车位角误差;
[0066]
s4:通过各个校正位置的误差值,建立数学模型,求取误差参数;
[0067]
s5:将误差参数下载至无人叉车的嵌入式电路板,对车位角误差进行补偿。
[0068]
s1具体包括以下步骤:
[0069]
s1-1:设置两个水平面上的校正地基,包括第一地基和第二地基;
[0070]
s1-2-1:在第一地基上设置四个定位角铁作为校正位置,定位方向与北向的夹角分别为0
°
、90
°
、180
°
、270
°
;
[0071]
s1-2-2:在第二地基上设置四个定位角铁作为校正位置,定位方向与北向的夹角分别为45
°
、135
°
、225
°
、315
°
;
[0072]
s1-2:在第一地基和第二地基上分别设置若干定位角铁作为校正位置。
[0073]
具体如图2所示,校正位置包括位置1至位置8,第一地基上设置相互垂直的角铁靠座,并在角铁靠座处上设置四个定位角铁作为校正位置,以定位角铁的定位方向作为期望车位角,位置1处的定位角铁的定位方向与北向夹角为0
°
,位置3处,定位角铁的定位方向与北向夹角为90
°
,位置5处,定位角铁的定位方向与北向夹角为180
°
,位置7处定位角铁的定位方向与北向夹角为270
°
。第二地基上同样设置相互垂直的角铁靠座,并设置四个定位角铁作为校正位置,位置2处的定位角铁的定位方向与北向夹角为45
°
,位置4处的定位角铁的定位方向与北向夹角为135
°
,位置6处定位角铁的定位方向与北向夹角为225
°
,位置8处定位角铁的定位方向与北向的夹角为315
°
。
[0074]
s2:使无人叉车在各个校正位置的定位角铁处进行停靠,获取无人叉车在各个校正位置停靠时的输出的实际车位角;
[0075]
具体的,无人叉车在定位角铁处进行停靠,使无人叉车的边角与定位角铁的直角贴紧,此时无人叉车的中轴线与定位角铁的定位方向重叠,若是停靠时,无人叉车输出的实际车位角等于定位角铁的定位方向与北向的夹角,则无人叉车输出的实际车位角没有误差,实际车位角等于期望车位角,若是不等于,则无人叉车实际车位具有误差。
[0076]
s2-1:使无人叉车在各个校正位置处停靠三次,取三次停靠的实际方位角平均值;
[0077]
在确定无人叉车的实际车位角时,使无人叉车在同一个校正位置停靠三次,取三次停靠输出的实际车位角的平均值。
[0078]
s3:根据期望车位角和实际车位角确定误差叉车在各个校正位置的车位角误差。
[0079]
s3-1:设定无人叉车在第一校正位置的误差为e1,其表示为:
[0080]
e1=h
1-h
′1ꢀꢀ
(1)
[0081]
h1为第一校正位置的期望车位角;
[0082]h′1为无人叉车在第一校正位置停靠三次,求取的实际车位角平均值。
[0083]
s4:通过各个校正位置的误差值,建立数学模型,求取误差参数。
[0084]
s4-1:对第一校正位置的误差e1构建误差数学模型,其表示为:
[0085]
e1=a0+a1cosh
′1+a2sinh
′1+a3cos2h
′1+a4sin2h
′1+a5cos3h
′1+a6sin3h
′1ꢀꢀ
(2)
[0086]
式中a0、a1、a2、a3、a4、a5、a6为待求取的误差参数;
[0087]
s4-2:得到其余校正位置的误差参数模型写为:
[0088][0089]
s4-3:将公式(3)简写为:
[0090]
e=ka
ꢀꢀ
(4)
[0091]
公式(4)中:
[0092]
为八个校正位置的车位角误差矩阵;
[0093]
为八个校正位置的三角函数参数矩阵;
[0094]
为误差参数组成的待求取的误差参数矩阵;
[0095]
根据公式(4)求得误差矩阵最优化结果:
[0096]
a=inv(k
t
k)k
teꢀꢀ
(5)
[0097]
公式(5)中k
t
为矩阵k的转置;
[0098]
inv(k
t
k)为矩阵k的转置乘以矩阵k后的矩阵求逆运算。
[0099]
s5:将误差参数下载值无人叉车的嵌入式电路板,对车位角误差进行补偿。
[0100]
s5-1:将误差参数a0、a1、a2、a3、a4、a5、a6下载至无人叉车的嵌入式电路板;
[0101]
s5-2:通过公式进行补偿:
[0102]
h=h
′
+a0+a1cosh
′
+a3cos2h
′
+a4sin2h
′
+a5cos3h
′
+a6sin3h
′ꢀꢀ
(6)
[0103]
公式(6)中h为校正后的车位角,h
′
为校正前的车位角。
[0104]
通过数据拟合补偿的方式,对无人叉车在各个车位角的误差进行补偿。
[0105]
以上的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1