一种能够捕捉并识别物体的非接触测量装置
1.本实用新型涉及图像识别与非接触测量领域,具体涉及一种能够捕捉并识别物体的非接触测量装置。
背景技术:
2.物体的非接触识别与测量是机器视觉的一种应用,该技术往往能够解决诸多工业流水线的自动化问题,提高自动化生产效率。
3.随着自动化技术的发展,工业流水线上识别和测量的需求越来越旺盛。目前已有的非接触测量装置主要基于深度相机或双目视觉,采用大多为固定式摄像头,不具备自动寻找目标并调整合适角度完成测量的功能。
技术实现要素:
4.本实用新型是为了解决上述问题而进行的,目的在于提供一种能够捕捉并识别物体的非接触测量装置。为此,本实用新型提供以下技术方案:
5.本实用新型提供了一种能够捕捉并识别物体的非接触测量装置,其特征在于,包括:支撑座;转动部,设置在支撑座上,包括水平转动单元和竖直转动单元;以及检测部,设置在转动部上,包括摄像头模块、测距模块以及激光发生器,其中,水平转动单元用于带动检测部水平转动,竖直转动单元用于带动检测部竖直转动,摄像头模块用于捕捉和识别物体,测距模块用于检测物体的距离,激光发生器用于指示物体的位置。
6.在本实用新型提供的能够捕捉并识别物体的非接触测量装置中,还可以具有这样的特征:其中,水平转动单元包括水平转动盘和水平角度舵机,竖直转动单元包括竖直转动臂和竖直角度舵机,水平角度舵机用于带动水平转动盘进行水平转动,竖直角度舵机用于带动竖直转动臂竖直转动。
7.在本实用新型提供的能够捕捉并识别物体的非接触测量装置中,还可以具有这样的特征:其中,水平转动盘可转动地设置在支撑座上,竖直角度舵机固定安装在水平转动盘上,竖直转动臂可转动地设置在竖直角度舵机上。
8.在本实用新型提供的能够捕捉并识别物体的非接触测量装置中,还可以具有这样的特征:其中,检测部还包括结构支架,结构支架与竖直转动臂固定连接,摄像头模块、测距模块以及激光发生器安装在结构支架上。
9.在本实用新型提供的能够捕捉并识别物体的非接触测量装置中,还可以具有这样的特征:其中,摄像头模块、测距模块以及激光发生器沿竖直转动臂的长度方向设置。
10.在本实用新型提供的能够捕捉并识别物体的非接触测量装置中,还可以具有这样的特征:其中,摄像头模块到水平转动盘的距离略大于测距模块到水平转动盘的距离。
11.在本实用新型提供的能够捕捉并识别物体的非接触测量装置中,还可以具有这样的特征:其中,摄像头模块采用搭载ov7725摄像头的openmv,测距模块采用sk07单点测距激光雷达。
12.在本实用新型提供的能够捕捉并识别物体的非接触测量装置中,还可以具有这样的特征,还包括:显示屏,用于显示测量数据;单片机,用于控制转动部、检测部以及显示屏;以及供电单元,用于为转动部、检测部、显示屏、以及单片机供电。
13.在本实用新型提供的能够捕捉并识别物体的非接触测量装置中,还可以具有这样的特征:其中,供电单元包括电源和稳压模块,电源通过稳压模块分别向转动部、检测部、显示屏、以及单片机输出需要的对应电压。
14.在本实用新型提供的能够捕捉并识别物体的非接触测量装置中,还可以具有这样的特征:其中,单片机型号为stm32f103vet6。
15.实用新型的作用与效果
16.本实用新型所涉及的能够捕捉并识别物体的非接触测量装置,包括支撑座、转动部以及检测部,这些结构具有以下效果:
17.支撑座用于支撑转动部和检测部,使测量能够平稳顺利地进行。
18.转动部设置在支撑座上,包括水平转动单元和竖直转动单元。水平转动单元用于带动检测部水平转动,竖直转动单元用于带动检测部竖直转动,使检测部能够根据物体所在位置调整到合适的角度。
19.检测部设置在转动部上,包括摄像头模块、测距模块以及激光发生器。摄像头模块能够捕捉和识别物体,测距模块可检测物体的距离,激光发生器能够通过向物体发射激光来指示物体的位置。
附图说明
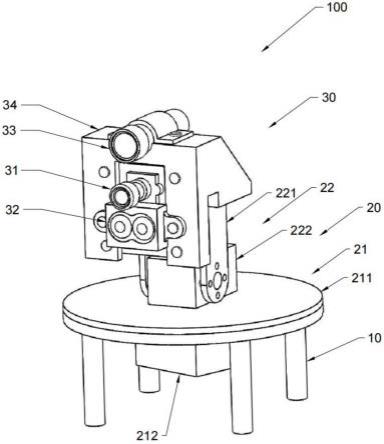
20.图1是本实用新型的实施例中能够捕捉并识别物体的非接触测量装置的结构示意图;
21.图2是本实用新型的实施例中能够捕捉并识别物体的非接触测量装置的总体框架图;以及
22.图3是本实用新型的实施例中能够捕捉并识别物体的非接触测量装置的电路原理图。
具体实施方式
23.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,以下实施例结合附图对本实用新型能够捕捉并识别物体的非接触测量装置作具体阐述。
24.《实施例》
25.图1是本实用新型的实施例中能够捕捉并识别物体的非接触测量装置的结构示意图。
26.如图1所示,能够捕捉并识别物体的非接触测量装置100包括支撑座10、转动部20以及检测部30。
27.支撑座10用于支撑转动部20和检测部30,使测量能够平稳顺利地进行。
28.转动部20设置在支撑座10上,包括水平转动单元21和竖直转动单元22。水平转动单元21用于带动检测部30水平转动,包括水平转动盘211和水平角度舵机212。水平角度舵机212,设置在水平转动盘211下方,用于带动水平转动盘211进行水平转动。竖直转动单元
22用于带动检测部30竖直转动,包括竖直转动臂221和竖直角度舵机222。竖直角度舵机222用于带动竖直转动臂221进行竖直转动。在本实施例中,水平转动盘211通过滑轮可转动地设置在支撑座10上,水平转动盘211可与支撑座发生较小摩擦力的相对转动。竖直角度舵机222固定安装在水平转动盘211上。竖直转动臂221设置为两个,两个竖直转动臂221分别可转动地设置在竖直角度舵机222的两侧对应位置,两个竖直转动臂221通过转轴连接并同步转动。转动部20可将检测部30根据物体所在位置调整到合适的测量角度。
29.检测部30设置在转动部20上。在本实施例中,检测部30包括摄像头模块31、测距模块32、激光发生器33以及结构支架34。摄像头模块31采用搭载ov7725摄像头的openmv,能够捕捉和识别物体。测距模块32采用sk07单点测距激光雷达,可检测物体的距离。激光发生器33能够通过向物体发射激光来指示物体的位置。结构支架34与竖直转动臂221通过螺栓固定连接,保持相对静止。摄像头模块31、测距模块32以及激光发生器33沿竖直转动臂221的长度方向设置,并通过螺栓安装在结构支架34上。摄像头模块31到水平转动盘211的距离略大于测距模块32到水平转动盘211的距离。
30.图2是本实用新型的实施例中能够捕捉并识别物体的非接触测量装置的总体框架图,图3是本实用新型的实施例中能够捕捉并识别物体的非接触测量装置的电路原理图。
31.如图2、3所示,在本实施例中,能够捕捉并识别物体的非接触测量装置100还包括单片机和供电单元等图1中未示出的现有技术。
32.供电单元包括电源和稳压模块,电源通过稳压模块分别向单片机和转动部供电。
33.单片机用于控制转动部、检测部。在本实施例中,采用单片机型号为stm32f103vet6,且外接有独立按键和显示屏。单片机与转动部相连,转动部的水平角度舵机和竖直角度舵机分别接入单片机的pb14、pb15两个gpio端口。单片机通过其vcc和3v3口分别向测距模块和摄像头模块供电,并且其串口的tx和rx分别接摄像头模块和测距模块的rx和tx,以实现全双工的串口通信。单片机的vcc和pb10口分别接激光发生器的两个端口,通过控制电平的方式控制激光发生器的开关,并为激光发生器供电。
34.以下结合附图1~3来说明本实用新型能够捕捉并识别物体的非接触测量装置100的具体测量过程:
35.步骤1:通过人工按下独立按键向单片机发送开始信号,单片机即向摄像头模块31发出搜索指令,查找摄像头视野内的待测目标;
36.步骤2:摄像头模块31查找到视野内的待测目标后,摄像头模块31向单片机发送待测目标的位置坐标;
37.步骤3:单片机根据位置坐标控制转动部20转动,使得摄像头模块31、测距模块32、激光发生器33在转动部20的带动下正对待测目标,激光发射器32发射的激光指向待测物体中心位置;
38.步骤4:单片机向摄像头模块31和测距模块32发送测量指令;
39.步骤5:摄像头模块31与测距模块32分别将待测目标的像素大小和距离通过串口发送给单片机,单片机处理测量数据并将测量结果在显示屏中显示。
40.实施例的作用与效果
41.本实施实例所涉及的能够捕捉并识别物体的非接触测量装置,包括支撑座、转动部以及检测部,这些结构具有以下效果:
42.支撑座用于支撑转动部和检测部,使测量能够平稳顺利地进行。
43.转动部设置在支撑座上,可将检测部根据待测目标所在位置调整到合适的测量角度。转动部包括水平转动单元和竖直转动单元。水平转动单元用于带动检测部水平转动,包括水平转动盘和水平角度舵机。水平角度舵机,设置在水平转动盘下方,用于带动水平转动盘转动至合适的角度,使检测部在水平方向上正对待测目标。竖直转动单元用于带动检测部竖直转动,包括竖直转动臂和竖直角度舵机。竖直角度舵机用于带动竖直转动臂转动至合适的角度,使检测部在竖直方向上正对待测目标。在本实施例中,水平转动盘通过滑轮可转动地设置在支撑座上,使水平转动盘可与支撑座发生较小摩擦力的相对转动,便于调整检测部的水平角度。竖直角度舵机固定安装在水平转动盘上。竖直转动臂设置为两个,两个竖直转动臂分别可转动地设置在竖直角度舵机的两侧对应位置,两个竖直转动臂通过转轴连接并同步转动。转动部整体具有2个自由度,能够调整检测部的位置和角度,使检测部正对待测目标,便于测量工作的进行,使测量过程更简单直观,测量结果更精准。
44.检测部设置在转动部上,包括摄像头模块、测距模块、激光发生器以及结构支架。摄像头模块采用搭载ov7725摄像头的openmv,在测量前能够先捕捉和识别物体,在测量时能够提供物体的像素坐标,通过判断物体的边的数量可判断处待测目标的形状。测距模块采用sk07单点测距激光雷达,可根据光子飞行时间计算距离检测物体的距离。通过光子返回的距离和摄像头像素坐标下的距离可推算出待测目标的尺寸。激光发生器能够通过向物体发射激光来指示物体的位置。结构支架与竖直转动臂通过螺栓固定连接,保持相对静止。摄像头模块到水平转动盘的距离略大于测距模块到水平转动盘的距离,摄像头模块、测距模块以及激光发生器沿竖直转动臂的长度方向设置,并通过螺栓安装在结构支架上,保证三个部分的同轴度,有助于实现准确测量。
45.综上,本实施实例所涉及的能够捕捉并识别物体的非接触测量装置具有捕捉到物体后自动调整角度对准物体的特点,能够实现定位物体位置、判断物体形状、测量物体距离及尺寸的功能,具有测量效率高、稳定性强、误差小等优点。
46.上述实施方式为本实用新型的优选案例,并不用来限制本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1