机械手臂承载装置与承载物平行感测系统的制作方法
1.本实用新型与机械手臂有关,特别是指一种可即时监控机械手臂与承载物之间的平行状态是否异常的机械手臂承载装置与承载物平行感测系统。
背景技术:
2.在半导体的领域中,由于涉及晶圆的作业需要精确无误差的操作,因此业界普遍在制程中使用由电脑控制的机械手臂来执行搬运晶圆的作业。虽然机械手臂是利用电脑控制,但有时候还是会因突发状况而导致机械手臂产生不正常的动作如振动或偏摆,这些不正常的动作都会影响搬运晶圆时的精度,轻则影响搬运的那片晶圆,严重的话甚至会影响到整个制程中的晶圆。因此为了确保机械手臂的准确度,业者会在机械手臂上安装可以感测振动或位移的感测器,随时感应机械手臂是否保持正常的位置。一旦不正常的振动或位移产生偏差时,感测器会产生一讯号传输至主机中,进而提醒工程师或控制软体机械手臂的问题,将晶圆制程中的不确定因素降低。
3.过去在机械手臂上设置感测器的技术已有相关研发,如一种装置稳定性监控系统,为一侦测装置安装于一机械手臂的表面,用以即时监控机械手臂的振动状况,然后透过一告警模组在超过范围时发出告警讯息;另一种感测装置及感测系统,包含一感测装置安装在机械手臂的机身、底座或靠近马达的表面,利用该感测装置的振动讯号来判断机械或机台是否有异常;又一种可预先侦测机械手臂及帮浦异常的装置,包含有复数个感测器设置在机械手臂的连动机构表面,通过收集机械手臂的位移或振动资讯与资料库比对是否有异常讯号,并在异常讯号发出时回传给主机预先警示。
4.上述常用的机械手臂感测系统,主要是用来侦测机械手臂本身的振动状态。然而,一个问题是机械手臂或晶圆可能在前一制程中因为某些原因(如在前一制程进行倾斜或旋转)而未保持水平状态,常用的机械手臂感测系统仅能判断机械手臂是否产生振动,而无法察觉机械手臂或晶圆未处于水平状态,容易导致机械手臂在下一制程中在承载晶圆时无法维持稳定而影响到制程进行。因此,如何在机械手臂承载或运送晶圆时亦能即时感测机械手臂与晶圆之间是否处在平行状态是相关业界亟待解决的问题。
技术实现要素:
5.本实用新型的主要目的在于提供一种机械手臂承载装置与承载物平行感测系统,其可以即时监控机械手臂承载装置与承载物间的平行状态是否有异常。
6.为达成上述目的,本实用新型所提供的一种机械手臂承载装置与承载物平行感测系统,包含有:一承载装置,具有一承载面;其中该承载面具有一第一位置及一第二位置,且该第一位置与该第二位置间距一预定距离;一第一感测单元,设于该承载装置的该第一位置,用以感测该承载面的振动,据以产生一第一讯号;一第二感测单元,设于该承载装置的该第二位置,用以感测该承载面的振动,据以产生一第二讯号;一处理装置,通讯连接于该第一感测单元及该第二感测单元,用以接收并分析该第一讯号及该第二讯号;以及一警示
装置,通讯连接该处理装置;借此,当该处理装置判断该第一讯号与该第二讯号不同时,即控制该警示装置发出一警示讯号。
7.在一实施例中,该处理装置分析该第一讯号以产生一第一讯号产生时间,该处理装置分析该第二讯号以产生一第二讯号产生时间;若该第一讯号产生时间与该第二讯号产生时间之一时间差大于一预定时间,该处理装置即判断该第一讯号与该第二讯号不同。
8.在一实施例中,该承载装置内部具有一第一感测容置空间及一第二感测容置空间;该第一感测容置空间位于该第一位置,该第二感测容置空间位于该第二位置,且该第一感测单元容置于该承载装置的该第一感测容置空间内,该第二感测单元容置于该承载装置的该第二感测容置空间内。
9.在一实施例中,该承载装置内部具有一传输线容置空间,分别连通至该第一感测容置空间与该第二感测容置空间;其中一第一传输线设于该传输线容置空间,一端电性连接于该第一感测单元,另一端电性连接于该处理装置;一第二传输线设于该传输线容置空间,一端电性连接于该第二感测单元,另一端电性连接于该处理装置。
10.在一实施例中,该处理装置更具有一控制单元,一端电性连接于该第一传输线及该第二传输线,另一端讯号连接于该处理装置;该控制单元用以对该第一讯号与该第二讯号进行讯号转换与处理。
11.在一实施例中,更包含有一封盖,设于该承载装置的该第一感测容置空间与该第二感测容置空间顶面,用以防止异物进出该第一感测容置空间与该第二感测容置空间。
12.在一实施例中,更包含有一封盖,设于该承载装置的该第一感测容置空间、该第二感测容置空间与该传输线容置空间顶面,用以防止异物进出该第一感测容置空间、该第二感测容置空间与该传输线容置空间。
13.在一实施例中,该承载装置为叉状,具有一柄部及二叉部;该二叉部自该柄部一端相对两侧延伸;该第一位置位于该二叉部其中一者远离该柄部一端,该第二位置位于该叉部另一者远离该柄部一端。
14.本实用新型的功效在于:该承载装置接触该物件时产生的复数讯号之间的时间差判断该承载装置与该物件之间是否为平行状态。如此一来,当该承载装置或该物件为非平行状态时,使用者可即时发现并处理,防止该承载装置以不稳定的状态承载或运送不稳定的物件,进而提升整体制程的稳定性与可靠度。
附图说明
15.图1为本实用新型一较佳实施例的分解图。
16.图2为本实用新型一较佳实施例的立体图。
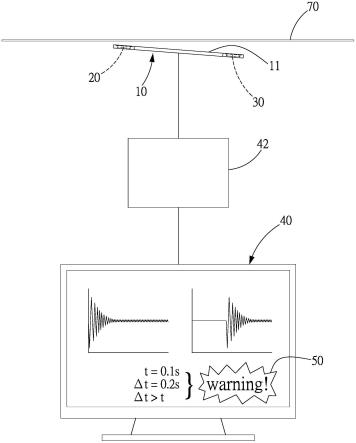
17.图3为本实用新型一较佳实施例的第一状态示意图,显示该承载装置朝一侧倾斜时接触物件的感测情况。
18.图4为本实用新型一较佳实施例的第二状态示意图,显示该承载装置朝另一侧倾斜时接触物件的感测情况。
19.附图标记
20.10:承载装置;11:承载面;13:柄部;14:叉部;15:封盖容置空间;16:第一感测容置空间;17:第二感测容置空间;18:传输线容置空间;19:穿孔;20:第一感测单元;22:第一传
输线;30:第二感测单元;32:第二传输线;40:处理装置;42:控制单元;50:警示装置;60:封盖;62:锁孔;64:锁固件;70:物件;t:预定时间;δt:时间差。
具体实施方式
21.以下即依本实用新型所揭示的目的与功效,举出较佳实施例,并配合附图详细说明。
22.请参阅图1及图2所示,本实用新型第一较佳实施例所提供的机械手臂承载装置与承载物平行感测系统其主要包含有:一承载装置10、一第一感测单元20、一第二感测单元30、一处理装置40、一警示装置50及一封盖60。
23.该承载装置10设置于一机械手臂,具有一承载面11用以承载并搬运一物件。该承载面11具有一第一位置及一第二位置,该第一位置及该第二位置间隔一预定距离,分别为该第一感测单元20与该第二感测单元30装设位置。在本实施例中,该承载装置10为一机械手臂的牙叉,具有一体成形的一柄部13及二叉部14。其中该柄部13的宽度从中央朝一端逐渐变宽,该二叉部14从该柄部13较宽的一端相对两侧朝远离该柄部13的方向延伸。该承载装置10内部具有一封盖容置空间15、一第一感测容置空间16、一第二感测容置空间17及一传输线容置空间18。该封盖容置空间15概呈y形,贯穿该承载装置10顶面。该第一感测容置空间16、该第二感测容置空间17与该传输线容置空间18连通于该封盖容置空间15底面。其中,该第一感测容置空间16与该第二感测容置空间17概呈圆形,且分别设置于该二叉部14一端。具体而言该第一位置即为该第一感测容置空间16所在位置,该第二位置即为该第二感测容置空间17所在位置。该传输线容置空间18概呈y形,其中两端分别连通于该第一感测容置空间15与该第二感测容置空间16,另一端设置于该柄部13远离该二叉部14一端,概呈开放状。该承载装置10更设有复数个穿孔19贯穿该封盖容置空间15。
24.该第一感测单元20为一极薄的电子元件,设于该承载装置10的该第一位置。具体而言,在本实施例中,该第一感测单元20容置于该第一感测容置空间16内,其厚度小于等于该第一感测容置空间16的深度,因此当该第一感测单元20容置于该第一感测容置空间16时,该第一感测单元20的高度不超过该承载装置10的高度,使该承载装置10厚度可维持原本的厚度。在本实施例中,该第一感测单元20为一微机电型加速度规(microelectromechanical systems,mems),用以感测物件何时接触该承载装置10该承载面11的该第一位置,并通过接触时的振动产生一第一讯号。该第一感测单元20通过有线或无线的方式传输该第一讯号。在本实施例中,该第一感测单元20以有线的方式进行传输,其中,一第一传输线22容置于该传输线容置空间18内,其厚度不超过该传输线容置空间18的深度。该第一传输线22一端电性连接于该第一感测单元20,用以传输该第一感测单元20产生的该第一讯号。在其他实施例中,该第一感测单元20亦可搭配一无线传输装置如蓝牙或远红外线等方式传输该第一讯号。
25.该第二感测单元30亦为一极薄的电子元件,容置于该第二感测容置空间17内,用以感测物件何时接触该承载面11的该第二位置,并通过接触时的振动产生一第二讯号。在本实施例中,该第二感测单元20以有线的方式进行传输。其中,一第二传输线32容置于该传输线容置空间18内,一端电性连接于该第二感测单元30,用以传输该第二感测单元30产生的该第二讯号。该第二感测单元30的其他结构与该第一感测单元20相同,在此容不赘述其
详细内容。
26.该处理装置40通讯连接于该第一感测单元20及该第二感测单元30,用以接收该第一讯号与该第二讯号之后对二者进行比对分析,以判断该第一讯号与该第二讯号是否相同。该处理装置40可为一电脑、一平板、一智慧型手机或其他等效电子装置。在本实施例中,该处理装置40更具有一控制单元42,一端电性连接于该承载装置10的该第一传输线22与该第二传输线32,另一端通过有线或无线的方式讯号连接于该处理装置40。该控制单元42用以对传输进来的该第一讯号与该第二讯号进行讯号的转换处理再传输至该处理装置40。在本实施例中,该控制单元42为一微控制器(microcontroller,mcu)。在其他实施例中,该处理装置40可直接讯号连接于该第一感测单元20与该第二感测单元30,以接收来自该第一讯号与该第二讯号进行比对分析。
27.该警示装置50通讯连接于该处理装置40,用以当该处理装置40判断该第一讯号与该第二讯号不同时,该处理装置40可控制该警示装置50发出一警示讯号,提醒使用者该承载装置10或该物件此时处于非平行状态。在本实施例中,该警示装置50为显示于该处理装置40的一警示图案(如图3所示);在其他实施例中,该警示装置可为一警示灯号、一警示语音或其他具警示效果的装置。
28.该封盖60为设于该承载装置10表面对应于该封盖容置空间15的一薄片。在本实施例中,该封盖60的材质为铝片。其外形对应于该封盖容置空间15的外形,使其以可拆离的方式固定于该封盖容置空间15,借以完整封闭该第一感测容置空间16、该第二感测容置空间17及该传输线容置空间18,使该第一感测单元20、该第二感测单元30、该第一传输线22及该第二传输线32与外界隔绝。针对该封盖60与该承载装置10的固定方式,在本实施中该封盖60具有复数个锁孔62对应于该承载装置10的该等穿孔19,使该封盖60可通过复数个锁固件64贯穿该等锁孔62与该等穿孔19并锁固于该承载装置10的该封盖容置空间15。在其他实施例中,该封盖60可利用焊接、卡榫或其他等效的固定方式固定于该承载装置10;亦或该承载装置10与该封盖60以一体成型的方式结合。
29.根据以上的结构组态,本实施例提供一种侦测机械手臂承载装置与承载物是否产生平行振动的方法,包含有以下步骤:
30.a)驱动该承载装置10承载一物件70,使该物件70接触该承载装置10承载面11。此时,该承载装置10的该第一位置或该第二位置会先后接触该物件70,或同时接触该物件70。
31.b)当该物件70接触该第一位置时,该第一感测单元20即可侦测一振动,并据以产生一第一讯号;当该物件70接触该第二位置,该第二感测单元30可侦测一振动,并据以产生一第二讯号。
32.c)接着,该第一讯号及该第二讯号通过该第一传输线22与该第二传输线32传输至该控制单元42进行讯号处理后,再传输至该处理装置40。在本实施例中,该第一讯号及第二讯号在该处理装置40显示时以波形图的方式呈现,其x轴为时间,其y轴为振幅,或称加速度的变化量。该处理装置40分析该第一讯号以取得一第一讯号产生时间,以及分析该第二讯号以取得一第二讯号产生时间。该第一讯号产生时间即该第一讯号振幅发生显著变化的时间点,即代表该物件70接触该第一位置瞬间的时间点;该第二讯号产生时间即该第二讯号振幅发生显著变化的时间点,即代表该物件70接触该第二位置瞬间的时间点。该第一讯号产生时间与该第二讯号产生时间的差值称为一时间差δt。该处理装置40分析该时间差δt
是否大于该预定时间t,若该时间差δt小于等于该预定时间t,则判断该第一讯号与该第二讯号相同,即代表该承载装置10与该物件70之间处于平行状态;然而若该时间差δt大于该预定时间t,则判断该第一讯号与该第二讯号不同,即代表该承载装置10与该物件70之间处于非平行状态。在本实施例中,该预定时间t设为0.1秒。
33.接着,若判断该第一讯号与该第二讯号不同,则该处理装置40控制该警示装置50发出该警示讯号,用以提醒使用者此时该承载装置10与该物件70之间为非平行状态。在本实施例中该警示装置50为显示于该处理装置40中的一警示图案。借此,使用者可马上发现该承载装置10与该物件70之间处于非平行状态而即时进行处理,防止该承载装置10与该物件70之间因非平行状态而导致该承载装置70之后在承载或运送时因处于非平行的状态而影响制程进行。
34.图3显示该承载装置10朝一侧呈倾斜状态,因此当该承载装置10接触该物件70时,该物件70会先接触该承载面11的该第一位置,然后才接触该第二位置。因此,该第一感测单元20所侦测到的该第一讯号的第一讯号发生时间会不同于该第二感测单元所侦测到的该第二讯号的第二讯号发生时间。如果该第一讯号发生时间与该第二讯号发生时间的该时间差δt0.2秒大于该预定时间t0.1秒,则该处理装置40判断该第一讯号不同于该第二讯号,并控制该警示装置50发出警示讯号。同样的,图4显示该承载装置10朝另一侧呈倾斜状态,因此当该承载装置10接触该物件70时,该物件70会先接触该承载面11的该第二位置,然后才接触该第一位置。其余判断的流程与图3相同,在此容不赘述其详细内容。
35.从前述例子可得知无论该承载装置10向左倾斜或向右倾斜,都能通过该时间差δt与该预定时间t的比对,判断该承载装置10与该物件70之间是否为平行状态。反之,若该承载装置10为水平状态,而该物件70为倾斜状态,由于该承载装置10的该第一位置与该第二位置接触该物件70的时间不同,本实用新型还是可以通过该时间差δt与该预定时间t的比对,判断该承载装置10与该物件70之间为非平行状态。
36.要补充说明的是,当感测单元的位置改变时,可侦测不同方向的倾斜。或是增加感测单元的数量,借以侦测多个方向的倾斜。
37.在另一较佳实施例中,该预定时间为复数个承载装置接触物件所产生的讯号时间差资料,所归纳出来的平均接触时间。因此该预定时间会随着使用者的资料量与累积时间而形成一浮动的数值,借此使用者可长期监控承载装置接触物件所产生的讯号时间差是否维持在该预定时间内,以判断是否需要对机械手臂承载装置进行维护。
38.综上所述,本实用新型所提供的机械手臂承载装置与承载物平行感测系统通过设于承载装置的复数感测单元,使承载装置接触物件时产生该复数感应讯号;并利用每一讯号产生时间之间的差值与预定时间比对,借以判断承载装置与物件之间是否为平行状态。如此一来,当承载装置与物件之间为非平行状态时,使用者可即时发现并处理,防止该承载装置以不稳定的状态承载或运送不稳定的物件,进而提升整体制程的稳定性与可靠度。
39.以上为本实用新型较佳实施例以及设计附图,较佳实施例以及设计附图仅是举例说明,并非用于限制本创作技艺的权利范围,凡以均等的技艺手段、或为下述“申请专利范围”内容所涵盖的权利范围而实施,并不脱离本实用新型范畴而为申请人的权利范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1