用于水质检测取样无人巡逻船的制作方法
1.本实用新型涉及一种环保设备,特别是涉及一种用于水质检测取样无人巡逻船。
背景技术:
2.水,是所有生命生存的重要资源,也是生物体最重要的组成部分。水在生命演化中起到了重要的作用。随着人口增多,全球气温上升,水资源越加匮乏。为此,需要对水资源进行切实有效的保护。但仍然存在一些人为的水污染行为,如向河流倾倒生活废水、工业废水,向湖泊等倾倒生活垃圾、工业垃圾等造成水污染。鉴于此,需要设置一种设备,能够实时地全流域地对水质进行检测,以便防止更多的垃圾、废水导入江河湖泊中。为了能有效地遏制非法排污等行为,需要设计一种装置,能够到达河流湖泊的任意水域位置,及时地对水质进行采集和检测,对发现有异常的水域,能够及时地发出报警。
技术实现要素:
3.本实用新型的目的是克服现有技术中的不足之处,提供一种结构简单、能够达到任意水域位置对水质进行检测并能随时发出报警信息的用于水质检测取样无人巡逻船。
4.本实用新型的目的是通过以下技术方案来实现的:
5.一种用于水质检测取样无人巡逻船,包括无人船本体及设置于所述无人船本体的控制装置,还包括:
6.气囊,所述气囊设置于所述无人船本体的底部;
7.推进器,所述推进器设置于所述无人船本体的尾部,且所述推进器与所述控制装置电性连接;
8.检测组件,所述检测组件包括检测仪、摄像头及警报器,所述摄像头及所述警报器均设置于所述无人船本体的顶部,所述无人船本体的底部开设有检测槽,所述检测仪设置于所述检测槽的出口位置处,所述检测仪、所述摄像头及所述警报器均与所述控制装置电性连接;及
9.取样仪,所述取样仪设置于所述无人船本体内,所述取样仪与所述控制装置电性连接,所述取样仪用于对水流取样。
10.优选地,所述无人船本体上设置有支撑架,所述警报器设置于所述支撑架的顶面,所述摄像头设置于所述支撑架的底面。
11.优选地,所述检测组件还包括过滤网,所述过滤网扣设于所述检测槽上。
12.优选地,所述警报器为扬声器。
13.优选地,所述取样仪包括取样泵及样桶,所述取样泵及所述样桶均设置于所述无人船本体内,所述取样泵上设置有取样管及放样管,所述取样管穿设于所述无人船本体的底部,所述放样管与所述样桶相连通。
14.优选地,所述取样仪还包括取样驱动件,所述取样驱动件设置于所述无人船本体内,所述取样驱动件的输出轴与所述取样管连接,所述取样驱动件用于带动所述取样管从
所述无人船本体的底部伸出或者回缩。
15.优选地,所述取样仪还包括取样座,所述取样座设置于所述无人船本体内,所述样桶、所述取样泵及所述取样驱动件均设置于所述取样座上。
16.优选地,所述取样座上开设有定位槽,所述样桶容置于所述定位槽内。
17.优选地,所述定位槽的底壁上开设有溢水孔。
18.优选地,所述气囊的外侧壁上设置有提手。
19.与现有技术相比,本实用新型至少具有以下优点:
20.本实用新型的用于水质检测取样无人巡逻船,包括无人船本体及设置于无人船本体的控制装置,还包括气囊、推进器、检测组件及取样仪,气囊设置于无人船本体的底部,推进器设置于无人船本体的尾部,且推进器与控制装置电性连接,检测组件包括检测仪、摄像头及警报器,摄像头及警报器均设置于无人船本体的顶部,无人船本体的底部开设有检测槽,检测仪设置于检测槽的出口位置处,检测仪、摄像头及警报器均与控制装置电性连接,取样仪设置于无人船本体内,取样仪与控制装置电性连接,取样仪用于对水流取样。如此,能够对任意水域进行水质采样、检测,当检测出异常时能够随时发出报警信息。
附图说明
21.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
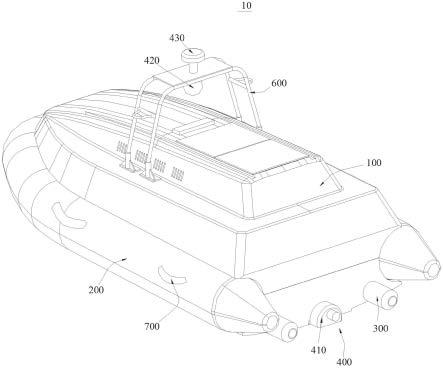
22.图1为本实用新型的一实施方式的用于水质检测取样无人巡逻船的结构示意图;
23.图2为图1所示的用于水质检测取样无人巡逻船的局部结构示意图;
24.图3为图1所示的用于水质检测取样无人巡逻船另一角度的局部结构示意图。
具体实施方式
25.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的较佳实施方式。
26.请参阅图1及图2,一种用于水质检测取样无人巡逻船10,包括无人船本体100及设置于无人船本体100的控制装置,还包括气囊200、推进器300、检测组件400及取样仪500,气囊200设置于无人船本体100的底部,推进器300设置于无人船本体100的尾部,且推进器300与控制装置电性连接,检测组件400包括检测仪410、摄像头420及警报器430,摄像头420及警报器430均设置于无人船本体100的顶部,无人船本体100的底部开设有检测槽110,检测仪410设置于检测槽110的出口位置处,检测仪410、摄像头420及警报器430均与控制装置电性连接,取样仪500设置于无人船本体100内,取样仪500与控制装置电性连接,取样仪500用于对水流取样。
27.需要说明的是,在无人船本体100内安装有控制装置,其中该控制装置安装有信号收发模块,用于与远端电脑进行信号连接,以使得用于水质检测取样无人巡逻船10能够进行远程控制。进一步地,在无人船本体100的底部上安装有气囊200,其中气囊200环绕无人船本体100的两侧及船头,如此,能够使得无人船本体10能够可靠地漂浮在水面上。进一步
地,在无人船本体100的船尾并且靠近水面的位置处安装有推进器300,例如推进器300可以是由电机驱动的螺旋桨,推进器300与控制装置通过导线进行电性连接,如此,能够远程控制推进器300的启停,以使得无人船本体100可以航行或者停止。进一步地,在无人船本体100的底部开设有检测槽110,其中检测槽110的两端分别朝向无人船本体100的前、后两端。检测仪410安装在检测槽110的尾部上,如此,检测仪410能够对进入到检测槽110内的水流进行检测,例如,检测仪410能够检测水流中的ph值、浊度等。警报器430及摄像头420均安装在无人船本体100的顶部,检测仪410、摄像头420警报器430均通过导线与控制装置实现电性连接。如此,当检测仪410中检测的数据发生异常时,控制装置激活警报器430发出警报信号,例如警报器430可以是扬声器,也可以是闪烁灯,从而惊醒操作人员该处水域水质产生异常,又或者当摄像头420拍摄到水质存在颜色差异,或者拍摄到违法倾倒污染物时,控制装置也会激活警报器430发出警报信号。取样仪500安装在无人船本体100的底部,取样仪500用于对无人船本体10所处位置的水流进行取样。如此,能够对任意水域进行水质采样、检测,当检测出异常时能够随时发出报警信息。
28.请参阅图1,一实施例中,无人船本体100上设置有支撑架600,警报器430设置于支撑架600的顶面,摄像头420设置于支撑架600的底面。
29.需要说明的是,将摄像头420及警报器430均安装在支撑架600上,能够使得摄像头420可以拍摄更加清晰,当警报器430发出报警信号时,能够快速找到无人船的位置。
30.请参阅图2,一实施例中,检测组件400还包括过滤网440,过滤网440扣设于检测槽110上。
31.需要说明的是,为了降低检测仪410的检测失误率,因此在检测槽110上盖设有过滤网440,过滤网440能够将垃圾等杂物隔离,避免杂物流入到检测槽110内。
32.请参阅图1,一实施例中,气囊200的外侧壁上设置有提手700。需要说明的是,通过在气囊200的外侧壁上安装提手700,从而有利于搬运本技术的用于水质检测取样无人巡逻船10。
33.请参阅图2及图3,一实施例中,取样仪500包括取样泵510及样桶520,取样泵510及样桶520均设置于无人船本体100内,取样泵510上设置有取样管530及放样管540,取样管530穿设于无人船本体100的底部,放样管540与样桶520相连通。
34.需要说明是,取样泵510通过导线与控制装置实现电性连接,如此,通过控制装置能够控制取样泵510的启停,当取样泵510启动时,取样管530会将无人船本体100底部的水流抽入取样泵510内,进而经放样管540流入到样桶520内,如此,实现对任意水域进行水质取样。
35.请参阅图3,一实施例中,取样仪500还包括取样驱动件550,取样驱动件550设置于无人船本体100内,取样驱动件550的输出轴与取样管530连接,取样驱动件550用于带动取样管530从无人船本体100的底部伸出或者回缩。
36.需要说明的是,为了避免取样管530在无人船航行时碰触到水底内的水槽等杂物,因此当不要取样时,将取样管530从无人船本体100的底部回收,当需要取样时,将取样管530从无人船本体100的底部穿出。具体地,在无人船本体100上安装取样驱动件550,其中取样驱动件550的输出轴与取样管530固定连接,如此,由取样驱动件550带动取样管530进行升降运动,以使得取样管530的取样口能够从无人船本体100的底部伸出,或者缩入至无人
船本体100的底部。一实施例中,取样驱动件550为电缸,利用电缸带动取样管530进行伸缩运动。
37.请参阅图2及图3,一实施例中,取样仪500还包括取样座560,取样座560设置于无人船本体100内,样桶520、取样泵510及取样驱动件550均设置于取样座560上。
38.需要说明的是,为了便于取样泵510、样桶520及取样驱动件550的安装,因此设置取样座560为中转结构。具体地,先将取样泵510、样桶520及取样驱动件550分别安装固定在取样座560上,再直接将取样座560安装在无人船本体100上。
39.请参阅图3,一实施例中,取样座560上开设有定位槽561,样桶520容置于定位槽561内。
40.需要说明是,在取样座560开设定位槽561,使得样桶520直接容置在定位槽561内,利用定位槽561的内侧壁对样桶520进行限位固定,便于取放样桶520。
41.请参阅图2,一实施例中,定位槽561的底壁上开设有溢水孔562。需要说明的是,该溢水孔562贯穿无人船本体100的底部,因此使得定位槽561与无人船本体100所在水域直接连通,当取样泵510取样过多,导致样桶520溢出时,水流会直接通过溢水孔562流到无人船本体100外。
42.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1