一种水果采摘扭矩测量装置
1.本实用新型涉及农业测量装置的技术领域,尤其涉及一种水果采摘扭矩测量装置。
背景技术:
2.水果采摘作业式水果生产中水果采摘作业是水果生产中最耗时、最费力的环节,其收获又属于劳动密集型作业,水果收获期间需投入的劳力约占整个生产过程的50%。正是由于采摘作业的复杂性,因此其自动化程度较低,往往都是通过人工进行采摘。在采摘作业时实现自动化,不仅可以降低劳动强度,节省有限的劳动力资源。
3.目前,水果采摘执行器只要两种形式:夹持式和非夹持式。其中夹持式分离果实方式有:扭断和拉断。由于分离果实的特殊性,所以对夹持式执行器提出了较高的要求——需要多自由度的运动且动作的精度要高。同时,夹持式在水果采摘过程中不仅需要提高采摘执行器的抓取效率,还需要减小对果实的损伤。目前,夹持式执行器产生损伤的主要原因是抓取过程中执行器对果实的抓取力过大、摩擦力不足、执行器扭矩过大等。
4.扭断分离果实的夹持式执行器在设计过程中需要参考较多的因素,执行器对果实的压力、执行器与果实之间摩擦力、果实扭断扭矩和执行器的自由度等等。现阶段的扭矩测量装置大多适用于车辆、船舶等重型器械,扭矩测量装置机械结构设计无法完成水果夹持;扭矩测量装置外观尺寸过大,对于水果这种小尺寸物体不适用;扭矩测量装置量程超出水果所需要的量程过多,造成较大的误差失去参考意义。
技术实现要素:
5.本实用新型的目的是为了克服以上现有技术存在的不足,提供了一种水果采摘扭矩测量装置。
6.本实用新型的目的通过以下的技术方案实现:一种水果采摘扭矩测量装置,包括机械抓爪、抓爪锁定组件、旋扭组件、手持外壳组件和扭矩传感器,所述旋扭组件包括主转轴、第一锥齿、第二锥齿和手持摇杆,所述机械抓爪通过抓爪锁定组件与主转轴的一端连接,所述主转轴安装于手持外壳组件并与第一锥齿连接,所述第一锥齿通过第二锥齿与手持摇杆连接,所述主转轴的另一端与扭矩传感器连接。
7.更优的选择,所述抓爪锁定组件包括第一拉杆、第二拉杆、拉杆转接件、旋盖、锁爪外壳和转轴连接件,所述锁爪外壳设有拉槽,所述锁爪外壳的顶部与机械抓爪连接,所述锁爪外壳的底部通过转轴连接件与主转轴连接,所述第一拉杆的一端与机械抓爪连接,所述第一拉杆的另一端与第二拉杆的一端连接,所述第二拉杆的另一端与拉杆转接件的一端连接,所述拉杆转接件的另一端穿过拉槽与旋盖连接。
8.更优的选择,所述机械抓爪包括多个单爪合件、第三连杆、法兰盘和单爪底座,多个所述单爪合件分别通过第三连杆与法兰盘铰接,多个所述单爪合件均与单爪底座连接,所述法兰盘和单爪底座均与抓爪锁定组件连接。
9.更优的选择,所述单爪合件包括夹爪、单爪安装座、第一连杆、第二连杆和连杆铰接件,所述夹爪通过单爪安装座分别与第一连杆的一端和第二连杆的一端铰接,所述第一连杆的另一端和第二连杆的另一端均与连杆铰接件铰接,所述连杆铰接件与单爪底座连接,所述第二连杆通过第三连杆与法兰盘铰接。
10.更优的选择,还包括防滑垫,所述防滑垫安装于夹爪。
11.更优的选择,所述手持外壳组件包括转轴底座、防滑外壳、摇杆底座和传感器保护壳,所述转轴底座和传感器保护壳分别安装于防滑外壳的两端,所述主转轴安装于转轴底座,所述扭矩传感器安装于传感器保护壳,所述手持摇杆通过摇杆底座安装于防滑外壳的侧方。
12.本实用新型相对现有技术具有以下优点及有益效果:
13.1、本实用新型通过机械抓爪、抓爪锁定组件、旋扭组件、手持外壳组件和扭矩传感器,使得用手驱动手持摇柄使机械抓爪扭转,并且增大了力矩,操作起来更省力,能够准确地测量出水果扭摘时候需要的力度;采用了小量程的扭矩传感器,使测量精度上升一个程度,为人员提供更加精确的设计参考依据。
14.2、本实用新型通过第一拉杆、第二拉杆、拉杆转接件、旋盖、锁爪外壳和转轴连接件,采用的拉槽设计可以调整夹爪的间距,更好的适应各种大小的水果。
15.3、本实用新型通过防滑垫,可以使夹爪尽可能的贴合水果表面,增大摩擦力,减小压应力,减小对水果表皮的损伤。
附图说明
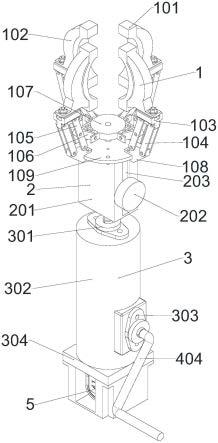
16.图1是本实用新型一种水果采摘扭矩测量装置的示意图;
17.图2是本实用新型一种水果采摘扭矩测量装置的局部剖视图;
18.附图中各部件的标记:1-机械抓爪;101-防滑垫;102-夹爪;103-单爪安装座;104-第一连杆;105-第二连杆;106-第三连杆;107-法兰盘;108-连杆铰接件;109-单爪底座;2-抓爪锁定组件;201-锁爪外壳;202-旋盖;203-拉槽;204-转轴连接件;205-第一拉杆;206-第二拉杆;207-拉杆转接件;3-手持外壳组件;301-转轴底座;302-防滑外壳;303-摇杆底座;304-传感器保护壳;4-旋扭组件;401-主转轴;402-第一锥齿;403-第二锥齿;404-手持摇杆;405-联轴器;5-扭矩传感器。
具体实施方式
19.下面结合附图和具体实施例对本实用新型的发明目的作进一步详细地描述,实施例不能在此一一赘述,但本实用新型的实施方式并不因此限定于以下实施例。
20.如图1和2所示,一种水果采摘扭矩测量装置,包括机械抓爪1、抓爪锁定组件2、旋扭组件4、手持外壳组件3和扭矩传感器5,机械抓爪1和抓爪锁定组件2的顶部连接,手持外壳组件3的顶部与抓爪锁定组件2的底部连接,旋扭组件4安装在手持外壳组件3的内部,旋扭组件4与抓爪锁定组件2的顶部连接,扭矩传感器5安装在手持外壳组件3的底部,旋扭组件4与扭矩传感器5连接。
21.机械抓爪1用于抓取水果;抓爪锁定组件2主要控制机械抓爪1的张合,可以让机械抓爪1适合不同大小的水果;旋扭组件4可以增大力矩,主要为机械抓爪1旋转提供动力;手
持外壳组件3方便使用者把持;扭矩传感器5主要测量水果的果梗扭断时候的扭矩,扭矩传感器5的量程为0~5nm,测量精度为
±
0.5%,该量程与精度适用于大部分的水果扭矩测量。
22.机械抓爪1包括4个单爪合件、第三连杆106、法兰盘107和单爪底座109,每个单爪合件包括夹爪102、防滑垫101、单爪安装座103、第一连杆104、第二连杆105和连杆铰接件108,防滑垫101安装在夹爪102上,每个夹爪102通过单爪安装座103分别与第一连杆104的一端和第二连杆105的一端连接,所述第一连杆104的另一端和第二连杆105的另一端均与连杆铰接件108连接,4个连杆铰接件108十字对称地安装在单爪底座109上,单爪底座109的底部与抓爪锁定组件2的拉锁外壳201的顶部连接。第二连杆105的中部与第三连杆106的一端铰接,第三连杆106的另一端与法兰盘107铰接,法兰盘107的底部与抓爪锁定组件2的第一拉杆205的上端连接。
23.单爪合件通过4个单爪合件配合从而实现抓紧水果;夹爪102为主要抓取水果的部件;防滑垫101增大抓爪与水果的摩擦力,有利于抓紧水果;单爪安装座103用于抓爪与第一连杆104和第二连杆105的连接;第一连杆104和第二连杆105和连杆铰接件108配合,可以让抓爪在不同角度转动从而能够抓紧不同尺寸的水果;第三连杆106起到传动作用,可以将法兰盘107的动力转动到第二连杆105上;法兰盘107起到第三连杆106均匀受力和传动作用;单爪底座109用于固定机械抓爪1。
24.抓爪锁定组件2包括第一拉杆205、第二拉杆206、拉杆转接件207、旋盖202、锁爪外壳201和转轴连接件204,锁爪外壳201的侧方设有拉槽203,锁爪外壳201的顶部与机械抓爪1的单爪底座109连接,锁爪外壳201的底部通过转轴连接件204与主转轴401连接,第一拉杆205的上端与机械抓爪1的法兰盘107连接,第一拉杆205的下端与第二拉杆206的左端连接,第二拉杆206的右端与拉杆转接件207的固定端连接,拉杆转接件207的螺纹端穿过拉槽203通过螺纹与旋盖202连接。
25.第一拉杆205通过自身在锁爪外壳201内上下移动从而改变法兰盘107的位置;第二拉杆206用于拉紧固定第一拉杆205;拉杆转接件207和旋盖202配合可以将第二拉杆206的一端进行拉紧固定;锁爪外壳201起到支架的作用;转轴连接件204用于将锁爪外壳201与主转轴401固定连接。
26.旋扭组件4包括主转轴401、第一锥齿402、第二锥齿403和手持摇杆404,抓爪锁定组件2的转轴连接件204与主转轴401的上端连接,主转轴401安装在手持外壳组件3的防滑外壳302,主转轴401的另一端通过联轴器405与扭矩传感器5连接。第一锥齿402安装在主转轴401上,第一锥齿402通过第二锥齿403与手持摇杆404连接,手持摇杆404通过手持外壳组件3的摇杆底座303安装在防滑外壳302的侧方。
27.主转轴401起到传动作用;第一锥齿402和第二锥齿403的配合起到动力转向传动的作用,第一锥齿402和第二锥齿403为34:17的齿数比,增大了扭矩,减少了操作人员的体力消耗;手持摇杆404可以通过手摇的作用转换成机械抓爪1转动的动力。
28.手持外壳组件3包括转轴底座301、防滑外壳302、摇杆底座303和传感器保护壳304,转轴底座301安装在防滑外壳302的顶部,传感器保护壳304安装在防滑外壳302的底部,旋扭组件4的主转轴401安装在转轴底座301上,扭矩传感器5安装在传感器保护壳304的内部,摇杆底座303安装在防滑外壳302的侧方,手持摇杆404安装在摇杆底座303。
29.转轴底座301用于固定安装主转轴401;防滑外壳302方便使用者抓取;摇杆底座
303用于将手持摇杆404安装在防滑外壳302上;传感器保护壳304用于安装和保护扭矩传感器5。
30.使用方法:将扭矩传感器5的模式设置成最大扭矩模式;旋开旋盖202,拉杆转接件207可以在拉槽203上下移动,当拉杆旋盖202位于拉槽203的上端时,第二拉杆206推动第一拉杆205往上探出,第一拉杆205推动法兰盘107向上移动,法兰盘107带动第三连杆106向外张开,第三连杆106带动第二连杆105向外张开,抓爪向外完全张开。当水果落入机械抓爪1内时,将旋盖202往拉槽203的下端拉动,机械抓爪1完全抓紧水果时,将旋盖202拧紧在锁爪外壳201上。一只手抓住防滑外壳302,另一只手摇动手持摇杆404。手持摇杆404带动第二锥齿403、第一锥齿402和主转轴401转动,主转轴401带动机械抓爪1和扭矩传感器5的轴转动。当机械抓爪1抓住水果转动,扭矩传感器5测量水果的果梗扭断时候的扭矩。
31.上述具体实施方式为本实用新型的优选实施例,并不能对本实用新型进行限定,其他的任何未背离本实用新型的技术方案而所做的改变或其它等效的置换方式,都包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1