一种杆塔测距装置的制作方法
1.本实用新型涉及输电线路设施设备检测技术领域,具体而言,涉及一种杆塔测距装置。
背景技术:
2.杆塔是架空配电线路中的基本设备之一。随着我国电力系统的快速发展,输电线路规模日益扩大,已投运和在建的杆塔数量随之增加。杆塔数量的日益剧增伴随着对杆塔的检修及运维工作量增大,其中耐张塔跳线驰度、防振锤安装距离等塔上距离校核工作必不可少。
3.目前,对杆塔测距的常用方法为主动测距法。主动测距法主要包括反射能量法和超声时间法等。反射能量法需要发射一束红外光或激光到被测物体表面,同时接收被测物体的反射光能量,根据接收到的能量来判断被测物体的距离;超声时间法通过测量一束超声波从发射到反射回仪器的时间来判断被测物的距离。主动测距法可减小运检人员的工作量,降低运检人员的作业风险,但是,由于主动测距法需要向目标测量物发送光束或超声波,若测量点与目标测量物之间存在障碍物,则会阻碍光线或超声波的传播,影响测量准确度。
4.有鉴于此,特提出本技术。
技术实现要素:
5.本实用新型所要解决的技术问题是:利用主动测距法对目标进行测距时容易受到障碍物物的干扰,导致测量准确度降低。目的在于提供一种杆塔测距装置,基于被动测距法中的单目测距法,在装置中设置可前后移动的相机载台,通过相机载台调整成像平面与目标被测物之间的距离,同时利用相机获得前后两次被测物图像数据,最后计算得到被测物的距离,从而消除障碍物干扰对测量准确度的影响。
6.本实用新型通过下述技术方案实现:
7.一种杆塔测距装置,其特征在于,包括相机、相机载台和转动组件;
8.所述相机载台包括矩形台面和固定在所述矩形台面底部两端的滑块;所述相机固定在所述矩形台面的顶部中间位置,所述相机的摄像头与所述矩形台面的一条长边位于同一竖直平面内;
9.所述转动组件水平设置,所述转动组件的顶部包括两个平行的条形凹槽和位于两个条形凹槽之间的条形刻度尺;所述条形刻度尺平行于所述条形凹槽;两个条形凹槽的间距与两个滑块的间距相同,所述条形凹槽的纵截面尺寸与所述滑块的纵截面尺寸相同,所述条形凹槽的长度大于所述滑块的长度;使用时,所述滑块在所述条形凹槽内前后滑动。
10.进一步的,
11.所述转动组件包括同轴的转盘和环形柱;所述转盘的底部设置有环形凹槽;所述环形柱的内径大于所述环形凹槽的内径,所述环形柱的外径小于所述环形凹槽的外径;使
用时,所述转盘扣合在所述环形柱的外部。
12.进一步的,
13.所述环形柱的外表面和所述环形凹槽的内表面均为光滑表面。
14.进一步的,
15.杆塔测距装置还包括水平设置的载平面,所述环形柱的底部与所述载平面的上表面固定连接,所述载平面的面积大于所述转盘的横截面积。
16.进一步的,
17.所述环形柱的高度与所述环形凹槽的深度相同;所述转盘的侧壁上蚀刻有用于测量旋转角度的刻度线,所述载平面的上表面蚀刻有0
°
刻度线。
18.进一步的,
19.所述载平面上设置有水平测量仪。
20.进一步的,
21.杆塔测距装置还包括支架,所述支架的顶端与所述载平面的下表面固定连接。
22.进一步的,
23.所述支架包括支撑柱,所述支撑柱上套设有高度调节机构;所述支撑柱的侧壁上沿高度方向间隔设置有多个螺纹孔;同一高度上,支撑柱的侧壁上沿周向间隔设置有多个螺纹孔;所述高度调节机构上沿周向设置有多个与所述支撑柱的螺纹孔对应的螺纹孔;所述高度调节机构通过螺钉和螺纹孔固定连接在所述支撑柱上。
24.进一步的,
25.所述支架包括多条支撑腿,所述支撑腿的连接端设置有螺纹孔;所述高度调节机构沿周向设置有多个连接件,所述连接件固定连接在所述高度调节机构的侧壁上;所述连接件上设置有与所述支撑腿的螺纹孔对应的螺纹孔;连接件的数量与支撑腿的数量相同;所述支撑腿与所述连接件通过螺钉和螺纹孔连接。
26.进一步的,
27.所述载平面包括:上层载平面和下层载平面,所述上层载平面与所述下层载平面通过多条连接柱连接在一起;所述上层载平面和所述下层载平面的上表面均固定设置有环形柱并蚀刻有0
°
刻度线;所述下层载平面的下表面与所述支架的顶端固定连接;所述上层载平面和所多条连接柱可拆卸。
28.本实用新型与现有技术相比,具有如下的优点和有益效果:
29.1、本实用新型提供的一种杆塔测距装置,基于被动测距法中的单目测距法和相似原理,利用相机采集杆塔的图像数据,替代主动测距法中向杆塔发射红外光或超声波,再获取由杆塔反射的红外光或超声波的方式,消除了测距点与杆塔之间的障碍物的干扰;通过设置可前后移动的相机载台来调整相机成像平面与杆塔之间的距离,并获取前后两次采集到的杆塔的图像数据,通过计算,最终获得杆塔与测量点之间的距离;由于消除了障碍物在数据采集过程中的干扰,使采集的数据更加准确,且利用了两次采集的数据结果进行计算,进一步提升了杆塔测距结果的准确性;
30.2、本实用新型提供的一种杆塔测距装置,设置了转动组件可带动相机在转盘上转动,实现不用调整整套装置的位置和角度即可采集到位于不同方位的杆塔的图像数据;并且在转盘上蚀刻由角度刻度线,可根据测距点的坐标和杆塔的坐标准确调整相机的旋转角
度,使相机正对杆塔,从而采集到更优质的图像数据;设置了条形刻度尺,可准确获取相机移动的距离,为最后计算杆塔距离提供数据支撑;
31.3、本实用新型提供的一种杆塔测距装置,支架上包括多条支撑腿,一方面可对装置在各个方向上起到支撑作用,提高装置的稳定性;另一方面,可应对测量环境坑洼或其他复杂的地势环境,通过调节支撑腿的高度和角度使装置在复杂地势环境下找到合适的支撑点;
32.4、本实用新型提供的一种杆塔测距装置,载台上设置由水平仪,用于监测载平面是否处于水平位置,根据监测结果调节支架式至载平面水平,从而保证相机的拍摄角度处于水平位置,以此获得更优的图像数据,进而提高测距的准确度;
33.5、本实用新型提供的一种杆塔测距装置,采用双层载平面,分别在上、下层载平面上布置相机、相机载台和转动组件,利用两台相机向后采集杆塔的图像数据,实现基于双面测距法和相似原理进行杆塔测距,通过不同的测距方式对测距结果进行验证,提高测距结果的准确性。
附图说明
34.为了更清楚地说明本实用新型示例性实施方式的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
35.图1为本实用新型实施例提供的单模测距原理示意图;
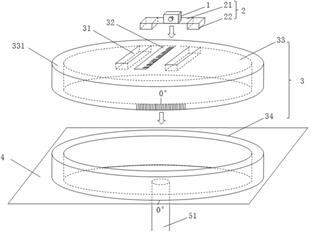
36.图2为本实用新型实施例提供的相机、相机载台、转动组件和载平面的结构及位置关系示意图;
37.图3为本实用新型实施例提供的载平面和支架的结构及位置关系示意图;
38.图4为本实用新型实施例提供的连接件结构放大图;
39.图5为本实用新型实施例提供的双层载平面结构及其与支架的位置关系示意图;
40.图6为本实用新型实施例提供的双目模测距原理示意图。
41.附图中标记及对应的零部件名称:
42.1-相机,2-相机载台,3-转动组件,4-载平面,5-支架,21-矩形台面,22-滑块,31-条形凹槽,32-条形刻度尺,33-转盘,34-环形柱,41-上层载平面,42-下层载平面,51-支撑柱,52-高度调节机构,53-支撑腿,331-环形凹槽,521-连接件。
具体实施方式
43.为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本实用新型,并不作为对本实用新型的限定。
实施例
44.目前,在对杆塔进行测距时大多采用主动测距法,而主动测距法中的发射能量法需要发射一束红外光到被测物体表面,同时接收被测物体的反射光能量,根据接收到的能
量来判断被测物体的距离;主动测距法中的超声时间法需要发射超声波到被测物体表面,同时接收被测物体反射的超声波,根据超声波从发射到反射会仪器的时间来判断被测物体的距离。主动测量法可在很大程度上减小作业人员的工作量,提高作业效率,降低作业风险。但是,由于主动测量法需要向被测物体发射能量,同时接收被测物体反射的能量来获得被测物体的距离,而现实工作环境中,测量点与被测物体之间往往会存在障碍物阻碍能量的传播,使得接收到的能量并不准确,从而导致获得的被测物体的距离与实际距离之间存在误差。
45.针对主动测距法的上述缺陷,本实施例提供一种基于相似原理和被动测距法中的单目测距法设计的杆塔测距装置,通过两次直接获取被测物体的图像,并根据前后两次获取的被测物体的图像计算被测物体的距离。由于被动测距法无需向被测物体发射能量和接收被测物体反射的能量,因此不必考虑障碍物对能量传播的干扰,从而提高数据采集的准确度,并且利用了两次采集的数据结果进行计算,进一步提升了杆塔测距结果的准确性。
46.单目测距方法根据如图1所示的小孔成像原理,利用单目相机进行测距。当相机位于a点时,为被测物体拍摄第一张图片。假设物体宽度为w,在相机成像平面上的投影宽度为w1,相机焦距为f,则根据相似三角形原理,被测物体与相机摄像头之间的距离(1);当相机摄像头从a点向前移动d1的距离到达c点后,为被测物体拍摄第二张图片,被测物体的宽度和相机的焦距不变,此时被测物体在相机成像平面的投影宽度为w2,则被测物体与相机摄像头之间的距离(2);又由于d2=d-d1,且被测物体的宽阔w在计算过程中为常数,则根据式(1)和式(2),可计算从被测物体与相机摄像头的距离。因此,只需要获得摄像头移动距离d1和被测物体在两张图片中的投影宽度,即可得到被测物体与相机摄像头之间的距离。由于杆塔设计时,其规格参数是已知的或可经过测量得到,因此式(1)和式(2)中的w为已知数。另外,图片中的投影宽度可利用现有的图像处理技术得到,如2013年10月,吉林工程技术师范学院学报第29卷第10期,公开了《基于图像分析的几何尺寸比较测量方法研究》,应用最小二乘法原理对实际图像边缘进行拟合运算,从而可获得图像的尺寸。
47.根据上述单模测距原理,本实施例提供的一种杆塔测距装置如图2所示,自上而下包括:相机1、相机载台2和转动组件3。其中,
48.相机1用来对杆塔进行拍照。
49.相机载台2包括矩形台面21和固定在矩形台面21底部两端的立方体滑块22。需说明的是,立方体滑块22可通过粘接、螺纹连接、焊接(若矩形台面21和立方体滑块22均为金属材质)等方式固定在矩形台面21底部的两端,也可使矩形台面21与立方体滑块22一体成形。
50.相机1固定在矩形台面21的顶部中间位置,相机1的摄像头与矩形台面21的一条长边位于同一竖直平面内。
51.转动组件3水平设置,转动组件3的顶部包括两个平行的条形凹槽31和位于两个条
形凹槽31之间的条形刻度尺32;条形刻度尺32平行于所述条形凹槽31。两个条形凹槽31的间距与两个滑块22的间距相同,条形凹槽31的纵截面尺寸与滑块22的纵截面尺寸相同,条形凹槽31的长度大于滑块22的长度;使用时,滑块22在所述条形凹槽31内前后滑动。
52.本实施例采用矩形台面21,并保证相机1的摄像头与矩形台面21的一条长边位于同一竖直平面内,其目的是,在使用时当滑块22在条形滑槽内前后滑动时,可以将矩形台面21的长边作为一条横向的标记线,配合条形刻度尺32上的刻度值可直接获得相机1的前后滑动距离。另外,条形凹槽31的纵截面尺寸与滑块22的纵截面尺寸相同,保证了滑块22在条形滑槽内前后滑动时保持在一条路径上平滑移动,从而获得准确的滑动距离。
53.进一步的,所述转动组件3包括同轴的转盘33和环形柱34;转盘33的底部设置有环形凹槽331;环形柱34的内径大于环形凹槽331的内径,环形柱34的外径小于所述环形凹槽331的外径;使用时,所述转盘33扣合在所述环形柱34的外部,通过转盘33的环形凹槽331与环形柱34之间相互配合,使用时,作用人员可通过转动转盘33来调整相机1的方向;当需要在同一个测距点对周围不同方向的杆塔进行测距时,只需通过旋转转盘33的方式使相机1的摄像头对准目标方位,而无需对整套装置进行角度调整,从而增加了测距的便捷性,提高了测距效率。
54.并且,环形柱34的外表面和环形凹槽331的内表面均为光滑表面,减小了转盘33的环形凹槽331与环形柱34之间的摩擦,是转盘33转动更加平滑。需补充的是,为了使转盘33转动时不发生晃动,本实施例优选将环形凹槽331的尺寸及厚度与环形柱34的尺寸及厚度设置为恰好匹配。
55.此外,环形柱34的高度与环形凹槽331的深度相同;转盘33的侧壁上蚀刻有用于测量旋转角度的刻度线,载平面4的上表面蚀刻有0
°
刻度线。在转盘33的侧壁上蚀刻有用于测量旋转角度的刻度线,载平面4的上表面蚀刻有0
°
刻度线的目的是方便作用人员根据目标杆塔的方位将转盘33旋转至合适的角度,如目标杆塔位于当前测距点的左前方30
°
方位,则作业人员需将转盘33向左旋转30
°
,使相机1摄像头正对该目标杆塔;环形柱34的高度设置为与环形凹槽331的深度相同,目的是方便读数。
56.在载平面4上还设置有水平测量仪,水平测量仪的作用是检测载平面是否处于水平位置,从而判断相机1的摄像头是否保持水平,以防某些特殊情况下(如摄像头倾斜向下)相机1无法拍摄到目标杆塔的图像。
57.如图3所示,在转动组件3的下表面固定连接有支架5。支架5包括支撑柱51,支撑柱51上套设有高度调节机构52。本实施例的支撑柱51采用圆柱体,高度调节机构52采用圆环,圆环形的高度调节机构52套设在圆柱体支撑柱51的外表面。支撑柱51的侧壁上沿高度方向间隔设置有多个螺纹孔;同一高度上,支撑柱51的侧壁上沿周向间隔设置有多个螺纹孔;高度调节机构52上沿周向设置有多个与支撑柱51的螺纹孔对应的螺纹孔;高度调节机构52通过螺钉和螺纹孔固定连接在所述支撑柱51上。高度调节机构52可在支撑柱51上上下滑动,以调节其在支撑柱51上的高度,当高度调节至理想位置时,通过螺钉和螺纹孔将高度调节机构52固定在支撑柱51上。本实施例在支撑柱51和高度调节机构52上沿周向等间距设置有3个相互匹配的螺纹孔,从而保证高度调节结构可牢固地固定在支撑柱51上。
58.支架5包括多条支撑腿53,支撑腿53的连接端设置有螺纹孔;高度调节机构52沿周向设置有多个连接件521,连接件521固定连接在高度调节机构52的侧壁上;连接件521上设
置有与支撑腿53的螺纹孔对应的螺纹孔;连接件521的数量与支撑腿53的数量相同;支撑腿53与连接件521通过螺钉和螺纹孔连接。本实施例中,沿高度调节机构52的周向设置有4个等间隔的连接件521,连接件521与高度调节结构一体成型。
59.如图4所示,支撑腿53与连接件521通过螺钉和螺纹孔的方式连接,支撑腿53能够以螺纹孔为轴在竖直平面内上下转动,从而确定支撑端的合适的支撑点,找到合适的支撑点后,通过拧紧螺钉将支撑腿53固定在某一高度。本实施例对应设置有4条支撑腿53,一方面可对装置在各个方向上起到支撑作用,提高装置的稳定性;另一方面,可应对测量环境坑洼或其他复杂的地势环境,通过调节支撑腿53的高度和角度使装置在复杂地势环境下找到合适的支撑点。
60.进一步的,本实施例在基于单目测距方法的基础上对杆塔测距装置做了进一步改进,提供了一种基于双目测距方法的杆塔测距装置。与单目测距装置不同的是,基于双目测距方法的杆塔测距装置的载平面4包括上下两层。如图5所示的载平面4包括:上层载平面41和下层载平面42,所述上层载平面41与所述下层载平面42通过多条连接柱连接在一起;所述上层载平面41和所述下层载平面42的上表面均固定设置有环形柱34并蚀刻有0
°
刻度线;所述下层载平面42的下表面与所述支架5的顶端固定连接;所述上层载平面41和所多条连接柱可拆卸。
61.其测距原理如图6,上层载平面上安装焦距为f1的相机,下层载平面上安装焦距为f2的相机,ab为被测物体,宽度为h,到相机摄像头的垂直距离为u;a1b1为ab焦距为f1的相机的成像,a2b2为ab通过焦距为f2的相机的成像;v1是焦距为f1的相机成像的像距,v2是焦距为f2的相机成像的像距,则根据相似原理可得到:
62.h1/v1=h/v=h2/v2(3),由式(3)可得v1=h1v2/h2(4);再由焦距、物距和像局关系公式得:1/f1=1/u+1/v1(5),1/f2=1/u+1/v2(6),根据式(4)-(6)可得到杆塔距离计算公式为:u=f1f2(h
1-h2)/(h1f
2-f1h2)。
63.同样的,可通过调节相机摄像头到被测杆塔的距离的方式获得前后两次数据,并利用现有的图像数据距离技术和上述计算公式得到杆塔的距离。通过不同的测距方式对测距结果进行验证,提高测距结果的准确性。需说明的是,上下两层载平面的相机的焦距可选择相同,也可选择不同。
64.以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1