一种智能陀飞轮手表的制作方法
[0001]
本申请涉及计时技术领域,尤其涉及一种智能陀飞轮手表。
背景技术:
[0002]
在日常生活中,尤其是在城市的快节奏生活中,计时装置,例如手表成为人们计时和确定时间的必须品。在近年来,随着智能移动终端的发展,更多的人们用智能移动终端作为计时装置,从而使得手表等计时器逐渐成为高端奢侈品。在高端奢侈品中,对手表或钟表等计时装置的准确性或者计时精度有较高的要求。
[0003]
陀飞轮手表自问世以来,由于其将整个擒纵机构组合在一起并转动,能够把地心引力对机械表中擒纵系统的影响降低,保证走时精度,得到广大用户的追捧和热爱。
[0004]
但是,现有陀飞轮手表的陀飞轮机构由发条带动,发条随着储力的释放会逐渐变得松弛,会导致陀飞轮机构的转动变慢;或者发条在刚上条后,发条过紧,储力的势能较高,带动陀飞轮机构转动较快。因此,容易出现计时不准确的情况。
技术实现要素:
[0005]
本申请提供一种智能陀飞轮手表,以解决现有技术中,由于发条过紧或者发条松弛导致陀飞轮机构计时不准确的技术问题。
[0006]
根据本申请的一个方面,提供了一种智能陀飞轮手表,包括表壳,设置在所述表壳内部的第一上条机构、储力机构和陀飞轮机构;
[0007]
所述第一上条机构包括:感应器、控制单元和第一驱动单元;所述感应器邻近所述陀飞轮机构,并用于感应所述陀飞轮机构的运动状态;所述控制单元根据所述感应器感应到的所述陀飞轮机构的运动状态生成控制信号;所述第一驱动单元与所述储力机构传动连接,所述第一驱动单元根据所述控制信号驱动所述储力机构储力或者释放力,以调整所述陀飞轮机构的运动状态;
[0008]
所述储力机构与所述陀飞轮机构传动连接,所述陀飞轮机构在所述储力机构的驱动下转动。
[0009]
在一种可能的设计方式中,所述第一上条机构还包括第一电机,所述第一驱动单元根据所述控制信号控制所述第一电机转动,所述第一电机的输出轴与所述储力机构传动连接。
[0010]
在一种可能的设计方式中,所述第一上条机构还包括信号处理单元,所述信号处理单元根据所述感应器感应到的所述陀飞轮机构的运动状态生成运动信息;所述控制单元根据所述运动信息和预设信息生成所述控制信号。
[0011]
在一种可能的设计方式中,感应器包括拾音器,所述拾音器用于拾取所述陀飞轮机构转动时发出的声音信号,以获取所述运动状态。
[0012]
在一种可能的设计方式中,所述感应器包括激光元件和激光标记;所述激光标记位于所述陀飞轮机构上,并随所述陀飞轮机构一起转动;所述激光元件位于所述陀飞轮机
构的一侧,所述激光元件用于识别所述激光标记,以获取所述陀飞轮机构的运动状态。
[0013]
在一种可能的设计方式中,所述感应器包括金属检测体和接近开关;所述金属检测体设置在所述陀飞轮机构上,并随所述陀飞轮机构一起转动,所述接近开关位于所述陀飞轮机构的一侧,所述接近开关用于感应所述金属检测体,以获取所述陀飞轮机构的运动状态。
[0014]
在一种可能的设计方式中,所述感应器包括可变电容,所述可变电容的动片设置在所述陀飞轮机构上,并随所述陀飞轮机构一起转动;所述可变电容的定片位于所述陀飞轮机构的一侧,根据所述可变电电容的定片与动片电容的变化确定所述陀飞轮机构的运动状态。
[0015]
在一种可能的设计方式中,所述智能陀飞轮手表还包括第二驱动单元、第二电机和指针机构,所述第二驱动单元根据所述控制单元的计时信号控制所述第二电机,所述指针机构的一端固定在所述第二电机的输出轴上,所述第二电机用于驱动所述指针机构转动,以显示时间。
[0016]
在一种可能的设计方式中,所述智能陀飞轮手表还包括第二上调机构,所述第二上条机构包括:第一传动轮、柄轴和第二传动轮,所述第一传动轮设置在所述表壳的内部,所述柄轴的一端与所述第一传动轮固接,所述柄轴的另一端延伸至所述表壳的外部;所述第二传动轮位于所述表壳的内部,并与所述第一传动轮啮合,所述第二传动轮与所述储力机构传动连接;所述柄轴用于通过所述第一传动轮和所述第二传动轮对所述储力机构进行蓄力。
[0017]
在一种可能的设计方式中,所述储力机构包括:发条盒、发条、第一齿轮和第二齿轮;
[0018]
所述发条设置在所述发条盒内,所述发条用于蓄力;所述第一齿轮与所述发条盒固接,所述第一齿轮用于分别与所述第一驱动单元和所述第二传动轮传动连接;所述第二齿轮与所述发条盒固接,所述第二齿轮用于与所述陀飞轮机构传动连接。
[0019]
本申请实施例通过在陀飞轮手表的陀飞轮机构附近设置感应器,感应器对陀飞轮机构的运动状态进行检测,通过控制单元根据检测到的陀飞轮机构的运动状态生成控制信号,从而控制第一驱动单元对储力机构进行储力或者释放力;这样,就能够使得储力机构储存的力(或者势能)在一个合适的范围内,在储力机构驱动陀飞轮机构转动时,就不会使得陀飞轮机构转动过快或者过慢,即能够对陀飞轮机构的走时进行校准;因此,能够保证陀飞轮机构走时的准确性。
[0020]
本申请的构造以及它的其他目的及有益效果将会通过结合附图进行详细说明,以保证对优选实施例的描述更加明显易懂。
附图说明
[0021]
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0022]
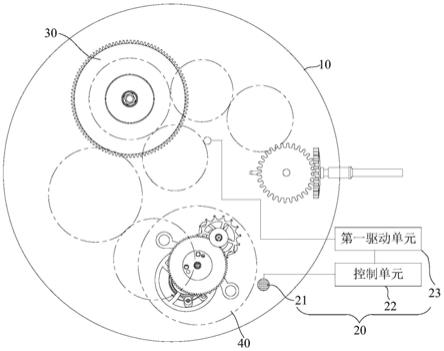
图1是本申请实施例提供的智能陀飞轮手表的第一种结构示意图;
[0023]
图2是本申请实施例提供的智能陀飞轮手表的第二种结构示意图;
[0024]
图3是本申请实施例提供的智能陀飞轮手表的第三种结构示意图。
[0025]
附图标记说明:
[0026]
10-表壳;20-第一上条机构;30-储力机构;40-陀飞轮机构;50-指针机构;60-第二上条机构;
[0027]
21-感应器;22-控制单元;23-第一驱动单元;24-第一电机;25-信号处理单元;26-第二驱动单元;27-第二电机;31-发条盒;32-发条;33-第一齿轮;34-第二齿轮;61-第一传动轮;62-柄轴;63-第二传动轮。
具体实施例
[0028]
为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
[0029]
在本申请实施例的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本申请的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0030]
在本申请中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本申请中的具体含义。
[0031]
在本申请中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0032]
在本申请的描述中,需要理解的是,术语“内”、“外”、“上”、“底”、“前”、“后”等指示的方位或者位置关系(若有的话)为基于附图1所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或者暗示所指的装置或者元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
[0033]
手表、立式钟表、挂式钟表或者床头闹钟作为日常计时设备,通常在个人装饰或者家庭装修中起着重要作用;当然,在计时方便的作用更是不可替代。
[0034]
手表、钟表等计时设备又可以分为电子表、机械表或半电子半机械的表;其中,机械表通常通过发条来作为动力装置,其中,发条可以是卷簧,通过对卷簧进行蓄力(又被称作上条),使得卷簧储存一定的弹性势能,在弹性势能逐渐释放的过程中,带动传动机构和擒纵机构以及设置在擒纵机构上的指针系统进行转动,从而对时间进行指示。
[0035]
但是,手表在佩戴过程中,总会发生位置的变化,例如,佩戴的用户从一地到另一
地,这会出现地心引力的变化。地心引力的变化会对擒纵机构的摆动造成较大的影响。从而导致机械表计时不准确。
[0036]
为了减小或者减弱地心引力对机械表的擒纵机构造成的影响,相关技术中出现一种钟表调速装置,将机械表的擒纵机构放置在一个框架之内,并让框架绕轴心旋转(即陀飞轮机构),这样将原本固定的擒纵机构旋转起来,在钟表的位置发生变化时,旋转的擒纵机构能够抵消方位误差,从而提高走时精度。
[0037]
但是,由于机械表的发条多采用卷簧或者类似于卷簧的部件作为蓄力结构,利用卷簧的弹性势能的变化来带动擒纵机构旋转。而卷簧的弹性势能在上条卷紧时,储存的势能较高,带动擒纵机构旋转的速度快,会导致走时较快;在卷簧的弹性势能逐渐释放后,卷簧会变得松弛,储存的势能较低,带动擒纵机构旋转的速度会变慢,会导致走时变慢。从而导致机械表走时误差较大,走时不准确。
[0038]
针对上述问题,本申请实施例提供一种智能陀飞轮手表,其主要出发点在于通过一感应器对陀飞轮机构的运动情况进行检测,在检测到陀飞轮机构运动较快时,通过控制单元发出控制信号,释放卷簧的部分势能;而在检测到陀飞轮机构运动较慢时,通过控制单元发出控制信号给卷簧上条,增加卷簧的部分势能。这样,使得卷簧或者是发条具有相对稳定的势能,从而能够使得陀飞轮机构的转动稳定,不会出现过快或者过慢的情况。能够有效提高陀飞轮手表走时的准确性。
[0039]
具体的,参照图1所示,图1是本申请实施例提供的智能陀飞轮手表的第一种结构示意图。本申请实施例提供的一种智能陀飞轮手表,包括表壳10。可选的,本申请实施例中,表壳10可以是不锈钢表壳、工程塑胶表壳、镀铜表壳或者是镀金表壳等。
[0040]
在一些具体示例中,表壳10具体可以包括后盖、中框、前圈和前盖(图中未);其中,后盖与中框可以通过螺纹连接、螺钉固定连接或者压合在一起。当然,在手表使用中,难免会有接触的水或者液体的情况,因此,后盖与中框可以是密封连接的。例如,通过密封圈或者密封胶进行连接。其中,密封圈或者密封胶的具体选用可以根据防水级别进行选择。本申请实施例中对此不作限定。
[0041]
前圈和前盖可以是连接在一起后,作为一个整体一起压合在中框上。
[0042]
可以理解的是,为了方便观察时间,前圈可以是玻璃、钢化玻璃、蓝宝石玻璃等透明材料制成。
[0043]
本申请实施例中,在表壳10的内部设置有第一上条机构20、储力机构30和陀飞轮机构40。
[0044]
可选的,在表壳10的内部还可以设置有表盘或者表盘面,在表盘或者表盘面上设有指示时间的刻度。指示时间的刻度可以通过漆印、刻印或者突印的方式设置在表盘或者表盘面上。
[0045]
本领域技术人员能够理解的是,通常表壳10的内部还设置有指针系统,指针系统可以包括分轮、时轮、分针和时针,分针连接在分轮上,时针连接在时轮上;分轮的转动可以与时轮联动。
[0046]
在一些示例中,还可以具有秒针,秒针可以连接在陀飞轮机构40上。
[0047]
本申请实施例中,储力机构30与陀飞轮机构40传动连接,陀飞轮机构40在储力机构40的驱动下转动。
[0048]
具体的,储力机构30可以通过手动上条等进行储力,然后逐渐释放储存的力(即卷簧或类似于卷簧的结构的弹性势能),从而带动陀飞轮机构40转动。
[0049]
本申请实施例中,第一上条机构20包括:感应器21、控制单元22和第一驱动单元23;感应器21邻近陀飞轮机构40,并用于感应陀飞轮机构40的运动状态;控制单元22根据感应器21感应到的陀飞轮机构40的运动状态生成控制信号;第一驱动单元23与储力机构30传动连接,第一驱动单元23根据控制信号驱动储力机构30储力或者释放力,以调整陀飞轮机构40的运动状态。
[0050]
具体的,本申请实施例中,感应器21可以是能够检测陀飞轮机构40运动状态的结构。例如,在一种可能的示例中,感应器21可以是光电门。
[0051]
具体的,光电门包括一个发光元件和一个接收元件,形成一个传感器。当发光元件和接收元件之间没有物体阻挡时,接收元件受到发光元件的光照射,输出一个低电平;在发光元件与接收元件之间有物体阻挡时,接收元件不受光照射,输出一个高电平。
[0052]
在具体实现时,可以将光电门设置在陀飞轮机构40的一侧,而陀飞轮机构40上设置一个遮挡片,遮挡片随陀飞轮机构40一起转动,这样在遮挡片从光电门的发光元件和接收元件之间通过时,光电门就能够输出一个高电平信号,控制单元22接收到相邻两个高电平信号后,根据相邻两个高电平信号的时间间隔,能够确定出陀飞轮机构40运动的快慢状态。从而根据陀飞轮机构40运动的快慢状态来对储力机构30进行调节。例如,在陀飞轮机构40运动过快时,释放掉储力机构30的部分力;在陀飞轮机构40运动缓慢时,增加储力机构30的储力。
[0053]
其中,控制单元22可以是中央处理器(central processing unit/processor,cpu)、微控制单元(microcontroller unit,mcu)或者嵌入式神经网络处理器(neural-network processing unit,npu)等。控制单元22可以对感应器21检测到的信号进行处理,并与预设信号进行对比,确定陀飞轮机构40的运动状态。
[0054]
可以理解的是,智能陀飞轮手表内还设置有电源,例如纽扣电池、可充电电池等。从而感应器21、控制单元22和第一驱动单元23进行供电。
[0055]
本申请实施例通过在陀飞轮手表的陀飞轮机构40附近设置感应器21,感应器21对陀飞轮机构40的运动状态进行检测,通过控制单元22根据检测到的陀飞轮机构40的运动状态生成控制信号,从而控制第一驱动单元23对储力机构30进行储力或者释放力;这样就能够使得储力机构30储存的力(或者势能)在一个合适的范围内,在储力机构30驱动陀飞轮机构40转动时,就不会使得陀飞轮机构40转动过快或者过慢;因此,能够保证陀飞轮机构40走时的准确性。
[0056]
可选的,参照图2所示,图2是本申请实施例提供的智能陀飞轮手表的第二种结构示意图。本申请实施例中,第一上条机构20还包括第一电机24,第一驱动单元23根据控制信号控制第一电机24转动,第一电机24的输出轴与储力机构30传动连接。
[0057]
可选的,第一电机24可以是伺服电机、同步电机或者是其他可以正反转的电机。在第一驱动单元23生成驱动信号后,第一电机24可以发生正转也可以发生反转。其中,正转可以是指对储力机构30进行储力,反转可以是指释放储力机构30的力。当然,本申请实施例中正转和反转仅作为示例性说明,在相反情况下也同样适用。例如,正转可以是释放储力机构30的力,反转对储力机构30进行储力。
[0058]
可以理解的是,第一驱动单元23根据控制信号生成的驱动信号还可以对第一电机24输出轴转动的角度进行控制,例如转过30
°
、45
°
或者其他角度。当然,也可以是控制第一电机24输出轴转动的圈数。例如,0.5圈、1圈或者其他圈数。
[0059]
需要说明的是,第一电机24的输出轴上可以设置有齿轮,通过齿轮与储力机构30进行啮合。其中,第一电机24输出轴转动角度或者转动的圈数可以根据输出轴上的齿轮与储力机构30上的齿轮的齿数比以及齿轮的半径进行确定。
[0060]
在一些可能的示例中,第一电机24的输出轴上的齿轮可以直接与储力机构30进行啮合。可选的,第一电机24输出轴上的齿轮也可以通过差动传动机构与储力机构30进行啮合。本申请实施例中对此不做限定。
[0061]
可选的,为了方便控制单元22对陀飞轮机构40的运动状态的识别。继续参照图2所示,本申请实施例中,第一上条机构40还包括信号处理单元25,信号处理单元25根据感应器21感应到的陀飞轮机构40的运动状态生成运动信息;控制单元22根据运动信息和预设信息生成控制信号。其中,预设信息可以是指陀飞轮机构40转过预定角度所需使用的标准时间。例如,在一些示例中,陀飞轮机构转过一周的时间为一分钟。
[0062]
这样,将陀飞轮机构40的运动信息与标准运动信息进行比对,来确定陀飞轮机构40当前的运动状态,能够提高对陀飞轮机构40运动状态确定的准确性。能够提高走时的准确性。
[0063]
具体的,感应器21包括拾音器,拾音器用于拾取陀飞轮机构40转动时发出的声音信号,以获取运动状态。
[0064]
具体的,陀飞轮机构40在转动时,擒纵机构会发出撞击的声音;例如滴答滴答的声响。拾音器拾取擒纵机构发出的撞击声,然后传输给信号处理单元25;信号处理单元25对微弱的声音信号进行放大和识别,之后将撞击音信号传输给控制单元22,控制单元22通过声音信号识别擒纵机构摆轮的周期t,并将摆轮的周期t与设定摆轮周期t进行比较,得出陀飞轮机构40运动的快慢情况,从而向第一驱动单元23输出控制信号,对发条的松紧进行调节,这样就能够校准陀飞轮机构40的走时。
[0065]
在一些可能的方式中,控制单元22也可以通过将擒纵机构撞击音的频率与设定频率进行比较,来确定陀飞轮机构40转动的快慢情况。
[0066]
可选的,本申请实施例中,拾音器可以包括监听头、麦克风中的任意一种。拾音器可以是数字拾音器,也可以是模拟拾音器。
[0067]
在一些可能的实现方式中,感应器21包括激光元件和激光标记;激光标记位于陀飞轮机构40上,并随陀飞轮机构40一起转动;激光元件位于陀飞轮机构40的一侧,激光元件用于识别激光标记,以获取陀飞轮机构40的运动状态。
[0068]
具体的,激光标记可以设置在陀飞轮机构40的上下端面上,也可以是设置在陀飞轮机构40的侧壁上。本申请实施例对此不作限定。相应的,激光元件可以是设置在陀飞轮机构40下方的夹板上,当然,激光元件也可以设置在陀飞轮机构40周壁的一侧。
[0069]
可选的,本申请实施例中,设置在陀飞轮机构40上的激光标记可以是一个也可以是多个。在陀飞轮机构40上设置多个激光标记的情况下,多个激光标记可以沿陀飞轮机构40的周向均匀间隔排布。
[0070]
这样,在激光元件开启后,激光元件可以识别设置在陀飞轮机构40上的激光标记,
根据激光标记的间隔角度μ和激光元件识别到激光标记的间隔时间t1,可以确定陀飞轮机构40在该间隔时间内的转动角速度v;即能够确定出陀飞轮机构40转动的快慢情况。
[0071]
具体的,激光元件将识别到陀飞轮机构40上激光标记的识别信号发送给信号处理单元25,信号处理单元25计算相邻两个识别信号的时间间隔t1;之后,信号处理单元25将时间间隔t1发送给控制单元22,控制单元22根据识别的时间间隔t1和相邻激光标记之间的角度μ计算出陀飞轮机构40的转速v;并将该转速v与设定的转速v进行比较,得出陀飞轮机构40转动的快慢情况。
[0072]
在一些可能的方式中,激光标记只有一个,这夹角μ为360
°
;用360
°
除以时间间隔t1则可以得到转速v。
[0073]
在另一些可能的方式中,激光标记可能有多个,为了计算更加准确,可以对多个时间间隔进行求和,然后用多个角度的和除以多个时间间隔的和。其中,转速的表达式可以表示为:
[0074][0075]
其中,v为陀飞轮机构40的转速;μi为从第i-1个激光标记到第i个激光标记之间夹角;ti为从检测到第i-1个激光标记到检测到第i个激光标记的时间间隔。
[0076]
本申请实施例中,通过激光元件来识别设置在陀飞轮机构40上的激光标记。这样,能够避免环境声音的干扰。能够提高陀飞轮手表计时的准确性。
[0077]
在一种具体示例中,感应器21包括金属检测体和接近开关;金属检测体设置在陀飞轮机构40上,并随陀飞轮机构40一起转动,接近开关位于陀飞轮机构40的一侧,接近开关用于感应金属检测体,以获取陀飞轮机构40的运动状态。
[0078]
具体的,接近开关是一种无需与运动部件进行机械直接接触操作的位置开关,当接触开关感应面到动作距离时即可使开关动作。其中,接近开关可以是电容式接近开关、霍尔接近开关、光电式接近开关中的一种。
[0079]
可以理解的是,本申请实施例中,金属检测体在陀飞轮机构40上的设置方式可以参照激光标记的设置方式;对陀飞轮机构40的运动状态的确定也可以参照上述激光标记和激光元件的方式确定,本申请实施例不再赘述。
[0080]
可选的,感应器21包括可变电容,可变电容的动片设置在陀飞轮机构40上,并随陀飞轮机构40一起转动;可变电容的定片位于陀飞轮机构40的一侧,根据可变电电容的定片与动片电容的变化确定陀飞轮机构40的运动状态。
[0081]
具体的,可变电容的动片和定片的设置方式可以参照激光标记和激光元件的设置。在陀飞轮机构40带动可变电容的动片转动是,可变电容的电容值发生变化,电容值输入到信号处理单元25,信号处理单元25通过计算处理得出陀飞轮机构40的转速信息。具体可以根据电容值变化的快慢情况来进行计算。之后,将陀飞轮机构40的转速信息发送给控制单元22,控制单元22将该转速与设定转速进行比较,从而得出陀飞轮机构40转动的快慢情况。
[0082]
通过上述描述,可以看出,本申请实施例能够对陀飞轮机构40的走时进行校准,能够提高陀飞轮手表走时精度。为了进一步确保陀飞轮手表的走时精度。参照图3所示,本申请实施例中,在智能陀飞轮手表中还设置有第二驱动单元26、第二电机27和指针机构50,第
二驱动单元26根据控制单元22的计时信号控制第二电机26,指针机构50的一端固定在第二电机26的输出轴上,第二电机26用于驱动指针机构转动,以显示时间。
[0083]
也就是说,本申请实施例提供的智能陀飞轮手表,其中主要计时的时针和分针由控制单元22内部的电子计时信息来确定,控制单元22根据电子计时信息生成控制信号,控制第二驱动单元26,第二驱动单元26控制第二电机27转动,以带动时针和分针的转动(即指针机构50),从而显示准确的时间。而陀飞轮机构40上可以与秒针固接,也能够展示机械机构的美感。
[0084]
在一些可能的示例中,控制单元22还可以与互联网实现互联,从而实施校准控制单元22内部的电子走时。
[0085]
可选的,本申请实施例中,表盘或者表盘面可以是显示屏,具体时间可以以数字的形式或者光斑的形式显示在显示屏上。
[0086]
可以理解的是,在手表内还可以集成计步器、血压测量仪、蓝牙以及心率测量等智能模块。这些智能模块具体可以与控制单元22电信号连接,并接受控制单元22的控制。其具体控制方式可以参照相关技术中的描述,本申请实施例对此不再赘述。
[0087]
在一些具体实现方式中,继续参照图3所示,智能陀飞轮手表还包括第二上调机构60,第二上条机构60包括:第一传动轮61、柄轴62和第二传动轮63,第一传动轮61设置在表壳10的内部,柄轴62的一端与第一传动轮61固接,柄轴62的另一端延伸至表壳10的外部;第二传动轮63位于表壳10的内部,并与第一传动轮61啮合,第二传动轮63与储力机构30传动连接;柄轴62用于通过第一传动轮61和第二传动轮62对储力机构30进行蓄力。
[0088]
具体的,柄轴62伸出至表壳10外部的部分可以通过手动转动,以对储力机构30进行上条蓄力。
[0089]
具体的,储力机构30包括:发条盒31、发条32、第一齿轮33和第二齿轮34;发条32设置在发条盒31内,发条32用于蓄力;第一齿轮33与发条盒31固接,第一齿轮33用于分别与第一驱动单元23和第二传动轮63传动连接;第二齿轮34与发条盒31固接,第二齿轮34用于与陀飞轮机构40传动连接。
[0090]
如上描述,发条32可以是卷簧或者类似于卷簧的结构。
[0091]
第一齿轮33可以固接在发条盒的端面上。第二齿轮34可以固定在发条盒31的周壁上。可选的,第一齿轮33的直径小于第二齿轮34的直径。
[0092]
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1