一种智能驾驶域控制器的制作方法
1.本实用新型涉及车辆智能控制领域,特别涉及一种智能驾驶域控制器。
背景技术:
2.智能驾驶域控制器(pilot control unit,pcu)不同于现有的车辆控制器(ecu),其智能化程度远远高于现有的车辆控制器,是无人驾驶车辆的“大脑”,在无人驾驶车辆中,智能驾驶域控制器进行各种决策控制车辆执行最优的动作,实时保证车辆的最佳行驶状态,而控制器一旦出现故障,将会造成巨大的安全隐患。因此有必要提供一种控制器,实时的监控自身工作状态,提前进行故障状态预警,更好的保障无人驾驶车辆的行车安全。
技术实现要素:
3.为提高控制器监控效果,本实用新型采用如下技术方案:
4.一种智能驾驶域控制器,包括主控模块和监控模块,所述的主控模块和监控模块连接,两者建立信息交互,所述的监控模块包括参数精度计算单元、监控模型构建单元、提示单元;
5.所述参数精度计算单元,用于获取主控模块运行时的运行参数精度;
6.所述监控模型构建单元,用于根据主控模块在正常工作状态时的运行参数精度对神经网络模型进行训练,构建控制器状态监控深度学习模型,判断控制器工作状态是否正常;
7.所述提示单元,当控制器工作不正常时,进行相关提示。
8.进一步的,还包括显示单元,所述显示单元与提示单元连接,用于显示提示单元发送的故障提示信息。
9.所述的运行参数精度包括控制器输出参数精度、控制器通讯参数精度、控制器动态响应参数精度。
10.所述的监控模型构建单元构建的控制器状态监控深度学习模型是根据获取的控制器正常运行时的各项参数精度,基于googlenet或者alexnet构建。
11.在前期训练过程中,监控模块获取主控模块正常运行时的参数精度,将获取的大量正常状态下的参数精度输入监控模型构建单元,从而构建状态监控深度学习模型,其深度学习模型可以是通过googlenet或者alexnet构建;在后期运用中,将实时获取的运行参数精度输入到状态监控深度学习模型中,模型将计算结果输出为正常或者不正常两种,根据模型输出的结果判断主控模块是否处于正常工作状态,当控制器当前运行时的各项参数精度满足控制器正常运行时的参数精度时,则认定控制器工作状态正常,不进行提示;当控制器当前运行时的参数精度不满足控制器正常运行时的相关精度时,则认定控制器工作状态不正常,发出相关提示。
12.有益效果:本实用新型提出的智能驾驶域控制器增加了监控模块,实时获取主控制器的工作数据,对主控制器的工作状态进行监督,当主控模块工作状态不正常时进行提
示,使驾乘人员及时的采取相关措施,避免因控制器故障造成重大的安全隐患。
附图说明
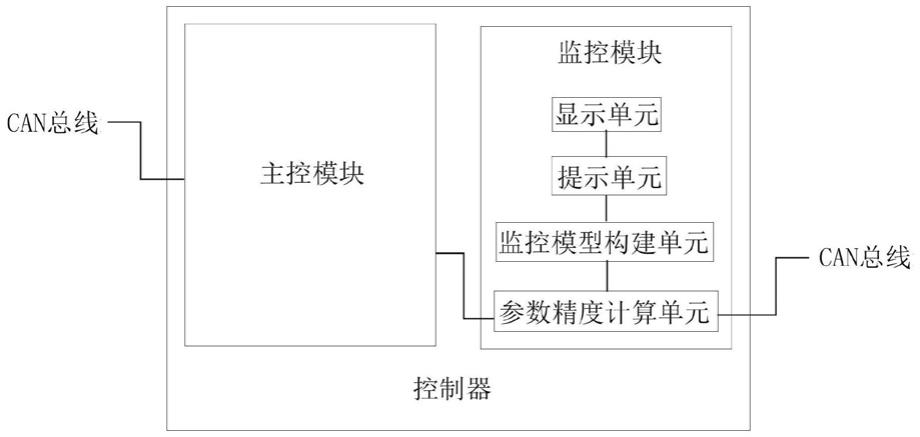
13.图1为本实用新型的模块结构示意图。
具体实施方式
14.以下将结合实施例对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
15.本实用新型提出的为提高控制器监控效果,采用如下技术方案:
16.一种智能驾驶域控制器,包括主控模块和监控模块,所述的主控模块和监控模块连接,两者建立信息交互,所述的监控模块包括参数精度计算单元、监控模型构建单元、提示单元;所述的参数精度计算单元输入端与主控模块连接,参数精度计算单元输出端与监控模型构建单元输入端相连,监控模型构建单元输出端与提示单元输入端相连。
17.所述参数精度计算单元,用于获取主控模块运行时的运行参数精度;参数精度计算单元输入端还与can总线连接,用于直接获取车辆内部状态参数。
18.所述监控模型构建单元,用于根据主控模块在正常工作状态时的运行参数精度对神经网络模型进行训练,构建控制器状态监控深度学习模型,判断控制器工作状态是否正常。
19.所述提示单元,用于当控制器工作不正常时,进行相关提示。
20.进一步的,还包括显示单元,所述显示单元输入端与提示单元输出端连接,用于显示提示单元发送的故障提示信息。
21.所述的运行参数精度包括控制器输出参数精度、控制器通讯参数精度、控制器动态响应参数精度;
22.进一步地,所述的控制器输出参数精度包括:
23.1).方向盘转向角度输出精度;
24.2).发动机扭矩输出精度;
25.3).车速输出精度;
26.4).电机转速输出精度;
27.5).行驶里程输出精度
28.6).电池电量输出精度;
29.7).温度输出精度。
30.所述的控制器通讯参数精度包括与车辆内部的电控系统的通讯数据精度和与外界通讯终端或服务器的通讯数据精度,其中车辆内部的电控系统的通讯数据精度包括:1).与can网络通信系统通讯数据精度;2).电池管理系统(bms)。
31.控制器动态响应参数精度是指从辅控单元接收到相关请求信息到主控单元发出相应指令的时间,包括:1).加速系统输入数据与电机输出转速的差值;2).制动系统输入数据与制动系统输出制动力的差值。
32.所述的监控模型构建单元构建的控制器状态监控深度学习模型是根据获取的控制器正常运行时的各项参数精度,基于alexnet或者googlenet训练得到的状态监控深度学习模型。
33.以发动机扭矩输出精度的获取为例说明上述各种参数精度的获取方法。主控模块和监控模块同时通过can总线接收发动机扭矩传感器发送的扭矩数,与此同时监控模块与主控模块进行信息交互,主控模块将自身获取的发动机扭矩传感器发送到监控模块,监控模块将自身获取的扭矩数据与主控模块发送的扭矩数据进行比对,最终通过参数精度计算单元获取主控模块的发动机扭矩输出精度。
34.在前期训练过程中,监控模块获取主控模块正常运行时的参数精度,将获取的大量正常状态下的参数精度形成基础训练数据,输入监控模型构建单元,监控模型构建单元以基础训练数据为训练样本,通过现有的卷积神经网络结构形成状态监控深度学习模型,其深度学习模型可以是通过现有的googlenet或者alexnet结构构建;在后期运用中,将实时获取的运行参数精度自动输入到状态监控深度学习模型中,模型自动输出判断结果,当控制器当前运行时的各项参数精度满足控制器正常运行时的参数精度时,认定控制器工作状态正常,提示单元不进行提示;当控制器当前运行时的参数精度不满足控制器正常运行时的相关精度时,则认定控制器工作状态不正常,提示单元发出相关提示。
35.本实用新型提出的智能驾驶域控制器增加了监控模块,实时获取主控模块的工作数据,从而对控制器的工作状态进行监督,当主控模块工作状态不正常时进行提示,使驾乘人员及时的采取相关措施,避免因控制器故障造成重大的安全隐患。
技术特征:
1.一种智能驾驶域控制器,其特征是,包括主控模块和监控模块,所述的主控模块和监控模块连接,两者建立信息交互,监控模块监控主控模块的工作状态;所述的监控模块包括参数精度计算单元,所述参数精度计算单元输入端与主控模块连接;所述的监控模块还包括监控模型构建单元、提示单元;所述的参数精度计算单元输出端与监控模型构建单元输入端相连,监控模型构建单元输出端与提示单元输入端相连;所述监控模型构建单元,用于根据主控模块在正常工作状态时的运行参数精度对神经网络模型进行训练,构建控制器状态监控深度学习模型。2.根据权利要求1所述的智能驾驶域控制器,其特征是,还包括显示单元,所述显示单元输入端与提示单元输出端连接。3.根据权利要求1所述的智能驾驶域控制器,其特征是,所述的控制器状态监控深度学习模型是基于googlenet网络结构或alexnet网络结构构建。4.根据权利要求1
‑
3中的任一权利要求所述的智能驾驶域控制器,其特征是,所述参数精度计算单元输入端还与can总线连接。
技术总结
一种智能驾驶域控制器,包括主控模块和监控模块,主控模块和监控模块连接,监控模块包括参数精度计算单元、监控模型构建单元、提示单元;参数精度计算单元输入端与主控模块连接,参数精度计算单元输出端与监控模型构建单元输入端相连,其中模型构建单元用于根据主控模块在正常工作状态时的运行参数精度对神经网络模型进行训练,构建控制器状态监控深度学习模型,判断控制器工作状态是否正常。本用新型提出的智能驾驶域控制器增加了监控模块,实时获取主控模块的工作数据,从而对控制器的工作状态进行监督,当主控模块工作状态不正常时进行提示,使驾乘人员及时的采取相关措施,避免因控制器故障造成重大的安全隐患。免因控制器故障造成重大的安全隐患。免因控制器故障造成重大的安全隐患。
技术研发人员:罗映 王淑超 李丙洋 罗全巧 丁洪磊
受保护的技术使用者:山东省网联智能车辆产业技术研究院有限公司
技术研发日:2020.10.16
技术公布日:2021/10/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1