一种海上目标自动识别方法与流程
[0001]
本发明属于目标识别技术领域,特别是一种海上目标自动识别方法。
背景技术:
[0002]
领海是一个国家神圣不可侵犯的敌方,对领海的监控及潜在危险的防御是领海安全的有效保障。海上监视是海上防御的第一步,主要对海上的目标进行探测、跟踪及目标识别,必要时对海上敌人作战行动进行监视。海上监视对象,包括水下目标、空中和水面,如水里的各类潜艇、空中的各类飞机及水面上的各种舰船等。
[0003]
在20世纪70年代后期人们提出了基于多传感器的信息融合概念,是一种通过将传感器、图像信号处理、计算机仿真和人工智能有效的结合起来而成的现代处理技术,它是通过对人类感知器官(四肢、眼、鼻、耳)所感知的信息(触觉、图像、味觉、声音)来进行有效的模拟,再利用先验知识对其进行综合分析,从而达到了对周围陌生环境做出有效可靠的分析判断目的。各类船舶是海上目标的主体,船舶在航行过程中,基于航行、定位、通信等需求,在不同的时间点会发射或反射多种类型的电磁信号,这些信号被传感器所接收,成为识别目标身份的主要依据。
[0004]
电磁信号的信号源可分为r类、l1类、l2类、a类四类,相应地有四类接收这些信号的传感器。这些传感器提供的信号数据包含时空位置信息和信号特征信息两部分,时空位置信息是指用来描述目标运动状态的动态参数,包括位置(经纬度、高度)、速度、加速度以及相对本舰的参数等;信号特征信息是指有助于确立目标身份的有关信息。具有相同“信号源批号”的数据就来自同一信号源,其时空位置信息包括“时间”、“经度”和“纬度”,信号特征信息包括“l1a_1”、“l1a_2”和“l1a_3”。
[0005]
现有的上海目标自动识别技术主要采用先将数据融合后在进行分析判断,最后得到对应的目标识别结果以及可信程度,这种方法对于数据源类型的要求较高,算法层面也较为复杂,识别速度较慢,不适用于需要快速识别、跟踪的场景,而且不能给出每类数据各自识别的可信度。
技术实现要素:
[0006]
本发明的目的在于提供一种识别速度快、结果可信度高、流程简单、便于应用的海上目标自动识别方法。
[0007]
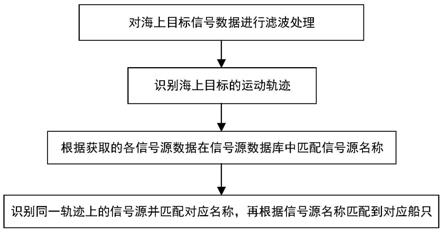
实现本发明目的的技术解决方案为:一种海上目标自动识别方法,包括如下步骤:
[0008]
步骤1、对海上目标信号数据进行滤波处理;
[0009]
步骤2、识别海上目标的运动轨迹;
[0010]
步骤3、根据获取的各信号源数据,在信号源数据库中匹配信号源名称;
[0011]
步骤4、识别同一轨迹上的信号源并匹配对应名称,根据信号源名称匹配对应船只。
[0012]
进一步地,步骤1中所述的对海上目标信号数据进行滤波处理,具体如下:
[0013]
步骤1.1、使用海上目标的连续采样数据建立长度为n的采样数据队列,在新的一次测量后,将采样数据队列的首数据去掉,其余n-1个数据依次前移,并将新的采样数据作为新采样数据队列的尾数据;
[0014]
步骤1.2、对新采样数据队列进行信号处理,并将处理结果作为本次测量的结果;
[0015]
在信号处理时,采用移动平均滤波器(moving average filter)进行去噪,移动平均滤波器的计算公式为:
[0016][0017]
式中,y(n)为输出信号;x(n)为输入信号;n为输入数据长度。
[0018]
进一步地,步骤2中所述的识别海上目标的运动轨迹,具体如下:
[0019]
步骤2.1、计算时间筛选阈度at
min
:
[0020]
(2.1.1)计算同批号信号源采样的时间间隔并记录最小的时间间隔t
i
,其中i=1,2,
…
n,n为不同批号信号源的总数;
[0021]
(2.1.2)比较不同批号的信号源最小采样时间间隔t
i
,获得不同批号信号源中最小的采样时间间隔t
min
;
[0022]
(2.1.3)将获得的最小采样时间间隔t
min
乘以系数a,得到时间筛选阈度at
min
;
[0023]
步骤2.2、计算经纬度筛选阈度值at
min
s
max
:
[0024]
(2.2.1)计算同批号信号源经纬度数据随时间的变化率并记录为s
i
,其中i=1,2,
…
n,n为不同批号信号源的总数;
[0025]
(2.2.2)比较不同批号信号源经纬度数据随时间的变化率s
i
,获得不同批号信号源中经纬度变化率的最大值s
max
;
[0026]
(2.2.3)将获得的经纬度变化率最大值s
max
乘以时间筛选阈度at
min
,得到经纬度筛选阈度值at
min
s
max
;
[0027]
步骤2.3、根据时间筛选阈度at
min
和经纬度筛选阈度值at
min
s
max
,判定两组信号源内是否有时空信息相同的点,若有多个点时空信息相同,则计算两个信号源移动的速率,若两者速率相等,则认定这两组信号源属于同一条轨迹。
[0028]
进一步地,步骤3中所述的根据获取的各信号源数据,在信号源数据库中匹配信号源名称,具体如下:
[0029]
步骤3.1、设置匹配次数i=1;
[0030]
步骤3.2、取出第i个目标a类的各个特征数据,与信号源数据库内的每个数据进行比较,匹配成功则记录信号源名称,将匹配次数加1;
[0031]
步骤3.3、若匹配次数i小于总目标数,则i=i+1,返回步骤3.2;否则进入步骤3.4;
[0032]
步骤3.4、查询匹配结果是否为一对一匹配,是则匹配成功;否则改变匹配规则,重新匹配。
[0033]
进一步地,步骤4中所述的识别同一轨迹上的信号源并匹配对应名称,根据信号源名称匹配对应船只,具体如下:
[0034]
步骤4.1、根据同一轨迹上的信号源数据,匹配信号源名称;
[0035]
步骤4.2、根据信号源名称,到目标数据库中匹配对应的目标船只名称;
[0036]
步骤4.3、根据一个目标的信号源个数和信号源名称匹配的个数,来评价目标识别
的准确度p,公式为:
[0037][0038]
本发明与现有技术相比,其显著优点为:(1)根据各个传感器采集的海上目标信号源数据,实现了海上目标的自动识别,完成海上目标自动识别并匹配到具体的船只,识别速度快;(2)对识别和匹配结果进行了可信度分析,结果可信度高,实现了对船只的精确识别,并且流程简单、便于应用。
附图说明
[0039]
图1为本发明海上目标自动识别方法的流程示意图。
[0040]
图2为本发明中时间筛选阈度值计算的流程示意图。
[0041]
图3为本发明中经纬度筛选阈度值计算的流程示意图。
[0042]
图4为本发明中信号源识别算法的流程示意图。
[0043]
图5为本发明中模型算法的流程示意图。
具体实施方式
[0044]
下面结合附图和具体实施例对本发明作进一步详细说明。
[0045]
结合图1,本发明一种海上目标自动识别方法,包括以下步骤:
[0046]
步骤1、对海上目标信号数据进行滤波处理,具体如下:
[0047]
步骤1.1、使用海上目标的连续采样数据建立长度为n的采样数据队列,在新的一次测量后,将采样数据队列的首数据去掉,其余n-1个数据依次前移,并将新的采样数据作为新采样数据队列的尾数据;
[0048]
步骤1.2、对新采样数据队列进行信号处理,并将处理结果作为本次测量的结果;
[0049]
在信号处理时,采用移动平均滤波器进行去噪,移动平均滤波器的计算公式为:
[0050][0051]
式中,y(n)为输出信号;x(n)为输入信号;n为输入数据长度。
[0052]
步骤2、识别海上目标的运动轨迹,同一信号源的时空位置信息可构成一条运动轨迹,对于不同的信号源,其运动轨迹可能是一致的,也就说明它们属于同一个目标。要判断哪些信号源属于同一个目标,就需要判断这些信号源的定位信息(时间、经度、纬度)是否一致。
[0053]
首先进行时间判断,根据采样点的时间间隔选取一个合适的时间长度,当两批信号源内的样本的时间间隔小于这个时间长度时,再考虑这两个样本的经纬度的差异,若经纬度的差异满足足够小的范围,则认为这两个样本点的处于同一时间的同一位置,若多批信号源内有多组数据满足这样的条件,即可判定它们属于同一个目标,具体如下:
[0054]
步骤2.1、计算时间筛选阈度at
min
,具体流程如图2所示:
[0055]
(2.1.1)计算同批号信号源采样的时间间隔并记录最小的时间间隔t
i
,其中i=1,2,
…
n,n为不同批号信号源的总数;
[0056]
(2.1.2)比较不同批号的信号源最小采样时间间隔t
i
,获得不同批号信号源中最
小的采样时间间隔t
min
;
[0057]
(2.1.3)将获得的最小采样时间间隔t
min
乘以系数a,得到时间筛选阈度at
min
;
[0058]
步骤2.2、计算经纬度筛选阈度值at
min
s
max
,具体流程如图3所示:
[0059]
(2.2.1)计算同批号信号源经纬度数据随时间的变化率并记录为s
i
,其中i=1,2,
…
n,n为不同批号信号源的总数;
[0060]
(2.2.2)比较不同批号信号源经纬度数据随时间的变化率s
i
,获得不同批号信号源中经纬度变化率的最大值s
max
;
[0061]
(2.2.3)将获得的经纬度变化率最大值s
max
乘以时间筛选阈度at
min
,得到经纬度筛选阈度值at
min
s
max
;
[0062]
步骤2.3、根据时间筛选阈度at
min
和经纬度筛选阈度值at
min
s
max
,判定两组信号源内是否有时空信息相同的点,若有多个点时空信息相同,则计算两个信号源移动的速率,若两者速率相等,则认定这两组信号源属于同一条轨迹。
[0063]
步骤3、根据获取的各信号源数据,在信号源数据库中匹配信号源名称,结合图4,具体如下:
[0064]
步骤3.1、设置匹配次数i=1;
[0065]
步骤3.2、取出第i个目标a类的各个特征数据,与信号源数据库内的每个数据进行比较,匹配成功则记录信号源名称,将匹配次数加1;
[0066]
步骤3.3、若匹配次数i小于总目标数,则i=i+1,返回步骤3.2;否则进入步骤3.4;
[0067]
步骤3.4、查询匹配结果是否为一对一匹配,是则匹配成功;否则改变匹配规则,重新匹配。
[0068]
步骤4、识别同一轨迹上的信号源并匹配对应名称,根据信号源名称匹配对应船只;
[0069]
根据步骤2、步骤3的方法,确定属于同一个目标(一条轨迹)上的多个信号源,根据这些信号源的数据,匹配信号源名称,根据这个目标上的信号源名称,到目标数据库中匹配对应的目标(船只)名称,根据一个目标的信号源个数和信号源名称匹配的个数,来评价目标识别的准确度,结合图5,具体如下:
[0070]
步骤4.1、根据同一轨迹上的信号源数据,匹配信号源名称;
[0071]
步骤4.2、根据信号源名称,到目标数据库中匹配对应的目标船只名称;
[0072]
步骤4.3、根据一个目标的信号源个数和信号源名称匹配的个数,来评价目标识别的准确度p,公式为:
[0073]
。
[0074]
实施例1
[0075]
本实施例的数据类型为:电磁信号的信号源分为r类、l1类、l2类、a类四类,相应地有四类接收这些信号的传感器。这些传感器提供的信号数据包含时空位置信息和信号特征信息两部分,时空位置信息是指用来描述目标运动状态的动态参数,包括位置(经纬度、高度)、速度、加速度以及相对本舰的参数等;信号特征信息是指有助于确立目标身份的有关信息。具有相同“信号源批号”的数据就来自同一信号源,其时空位置信息包括“时间”、“经度”和“纬度”,信号特征信息包括“l1a_1”、“l1a_2”和“l1a_3”,数据来源南京理工大学数学
建模网站。
[0076]
首先确定信号源是否来自同一个目标,即是否属于同一条轨迹,表1为采用本发明算出的各批信号源之间采样时间相同的点。
[0077]
表1时间重合的信号数目(部分)
[0078][0079]
在筛选出采样时间相同的点之后,判断这些时刻的采样点是否处于同一位置,结果如表2所示:
[0080]
表2位置重合的信号数目(部分)
[0081][0082]
根据上述的时间、位置匹配结果,计算出两个批次信号源属于统一目标的可信度,结果如表3所示:
[0083]
表3信号源匹配置信度(部分结果)
[0084][0085]
取出其中置信度高于0.6的结果,可以得到匹配置信度高的信号源批号集合。
[0086]
得出同一目标所对应各个信号源批号,结果如表4:
[0087]
表4目标匹配结果
[0088][0089]
这样便确立了属于同一个目标的信号源。
[0090]
再根据每个目标的信号源数据,匹配对应的信号源名称,根据信号源名称匹配对应的目标,结果如表5所示:
[0091]
表5船只目标识别结果
[0092][0093]
这样便可以从传感器获取的信号源数据中,识别出数据库中对应的目标。
[0094]
综上所述,本发明根据各个传感器采集的海上目标信号源数据,实现了海上目标的自动识别,完成海上目标自动识别并匹配到具体的船只,识别速度快;此外,对识别和匹配结果进行了可信度分析,结果可信度高,实现了对船只的精确识别,并且流程简单、便于应用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1