一种车内监控画面遮挡检测误报警恢复的方法与流程
1.本发明涉及图像处理技术领域,特别涉及一种车内监控画面遮挡检测误报警恢复的方法。
背景技术:
2.目前,车内监控画面主要基于背景帧差来实现遮挡检测,由于车内环境复杂,车内监控画面的背景帧差易受乘车人员增减、活动,车窗外光线、景物变化等因素影响,因此背景帧差一直处于波动状态。当某种干扰因素(乘车人员、车窗光线、车内物体等)导致监控画面突然被遮挡而使背景帧差很大,超出设定的遮挡判定阈值,那么系统就会发出遮挡警报。
3.然而,现有技术中存在以下的缺陷:
4.由于某种干扰因素导致的监控画面被遮挡,在连续多帧背景帧差值超出设定的遮挡判定阈值时就会产生预警信号,等到干扰因素去除,在连续多帧背景帧差降低至设定阈值以下时,预警信号才会解除;因此系统会在这段时间内一直处于遮挡预警状态,而这段时间内的报警正是一种误报警,长时间的误报警不仅降低了客户体验,更影响了遮挡检测的性能评测。
技术实现要素:
5.为了解决上述问题,本发明的目的在于:针对现有技术中这种遮挡检测误遮挡的情况,本技术提出了一种误报警恢复的方法。在监控画面被干扰物影响或短暂遮挡时,设备需要产生短暂预警,而在干扰被清除时,需要及时响应,停止遮挡预警,从而实现误报警的快速恢复。
6.具体地,本发明提供一种车内监控画面遮挡检测误报警恢复的方法,所述方法包括以下步骤:
7.s1,初始化:
8.s1.1,阈值初始化,包括,帧差阈值t1,t2;计数器阈值tc1,tc2,tc3;缓存容量n
vec
;
9.s1.2,计数器初始化,即c1=0,c2=0,c3=0;
10.s2,计算背景帧差:将当前帧图像与背景图像作帧差,并对帧差图像作腐蚀处理,统计腐蚀后帧差图像中非零像素点的总数并归一化,通过计算,得到归一化的全局帧差特征d;
11.s3,进行遮挡判断:
12.s3.1,帧差计数器计数:
13.如果d>t1,则令c2=0,c1=c1+1,转步骤s3.2;否则令c1=0,c2=c2+1,转步骤s3.3;
14.s3.2,遮挡判断:
15.如果c1>tc1,则令遮挡信号shade_flag=1,转步骤s4;否则,转步骤s7;
16.s3.3,遮挡复位:
17.如果c2>tc2,则令遮挡信号shade_flag=0,转步骤s7;否则,直接转步骤s7;
18.s4,缓存背景帧差;
19.s5,判断帧差变化趋势:
20.s5.1计算缓存时段帧差变化率:
21.按公式(4)计算缓存时段帧差变化率δd,
22.δd=vec[n
vec-1]-vec[0]
ꢀꢀꢀ
公式(4)
[0023]
其中,n
vec-1与0为缓存索引序号,vec[n
vec-1]表示缓存向量中当前时刻缓存的帧差,vec[0]表示缓存向量中历史缓存帧差,距离当前时刻n
vec-1个帧。实际缓存时段帧差变化率计算应为但在实际中由于本专利方法只需要判断δd的正负,不需要具体数值,因此减少计算量简化为公式(4)。
[0024]
s5.2如果δd<0,则令计数器c3=0,i=0,转步骤5.3;否则转步骤s7;
[0025]
s5.3计算相邻帧差变化率:
[0026]
如果i<n
vec-1,则按公式(5),计算δd,转步骤5.4;否则转步骤s6;
[0027]
δd=vec[i+1]-vec[i]
ꢀꢀꢀ
公式(5)
[0028]
其中,i表示缓存向量的索引序号,0≤i<n
vec-1;
[0029]
s5.4统计帧差下降频数:
[0030]
如果δd<0,则令计数器c3=c3+1,i=i+1,转步骤s5.3;否则,直接计算i=i+1,转步骤s5.3;
[0031]
s6,进行误报警恢复判断:
[0032]
s6.1,如果c3>tc3且d<t2,转步骤s6.2,;否则转步骤s7;
[0033]
s6.2,复位遮挡信号,即令shade_flag=0;
[0034]
s7,返回,等待下一帧图像,执行步骤s2。
[0035]
s1中的帧差阈值t1=0.34,t2=0.65。
[0036]
s1中的计数器阈值tc1=10,tc2=5,tc3=8。
[0037]
s1中的缓存容量n
vec
=16。
[0038]
s2计算背景帧差,进一步包括:
[0039]
根据公式(1)将当前帧图像与背景图像作帧差,并根据公式(2)对帧差图像作腐蚀处理,按公式(3)统计腐蚀后帧差图像中非零像素点的总数并归一化;
[0040]
d(i,j)=abs(i
n
(i,j)-i0(i,j))
ꢀꢀꢀ
公式(1)
[0041]
d
e
=erode(d)
ꢀꢀꢀ
公式(2)
[0042][0043]
其中,m、n分别为图像的高宽,i
n
为当前帧图像,i0为背景图像,d为帧差图像,d
e
(i,j)表示腐蚀后的帧差图像第i行j列像素值,d为归一化的全局帧差特征。
[0044]
s4,缓存背景帧差,进一步包括:
[0045]
s4.1计算缓存向量大小,记为vector_size,
[0046]
s4.2如果vector_size>n
vec
,则删除向量头部存储缓存帧差,并在向量尾部加入当
前帧的帧差d;否则,在向量尾部直接加入当前帧的帧差d,其中:n
vec
为缓存容量,表示缓存最多保存n
vec
个数值。
[0047]
由此,本技术的优势在于:结合缓存时段帧差变化率和时段内帧差下降频数来判断帧差的下降趋势,减少误报警时间,提高了客户体验,更改善了遮挡检测的性能评测。
附图说明
[0048]
此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,并不构成对本发明的限定。
[0049]
图1是本发明方法的遮挡检测误报警恢复过程示意图。
[0050]
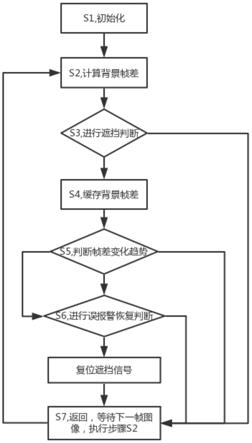
图2是本发明方法的流程示意图。
[0051]
图3是本发明方法具体实施例的流程图。
具体实施方式
[0052]
为了能够更清楚地理解本发明的技术内容及优点,现结合附图对本发明进行进一步的详细说明。
[0053]
如图2所示,一种车内监控画面遮挡检测误报警恢复的方法的主要实施步骤:
[0054]
步骤s1.初始化;
[0055]
步骤s2.计算背景帧差;
[0056]
步骤s3.进行遮挡判断:当遮挡则进行步骤s4,否则步骤s7;
[0057]
步骤s4.缓存背景帧差;
[0058]
步骤s5.判断帧差变化趋势:结合缓存时段帧差变化率和时段内帧差下降频数来判断帧差的下降趋势则进行步骤是6,否则步骤s7;
[0059]
步骤s6.进行误报警恢复判断:当判断为误报警,则进行复位遮挡信号,否则进行步骤s7;
[0060]
步骤s7.返回,等待下一帧图像,执行步骤s2。
[0061]
如图3所示,本发明涉及一种车内监控画面遮挡检测误报警恢复的方法,其中方法的具体实施步骤如下:
[0062]
步骤1.初始化:
[0063]
1.1背景初始化
[0064]
1.2阈值初始化,其中,帧差阈值t1=0.34,t2=0.65;计数器阈值tc1=10,tc2=5,tc3=8;缓存容量n
vec
=16;
[0065]
1.3计数器初始化,即c1=0,c2=0,c3=0;
[0066]
步骤2.计算背景帧差
[0067]
将当前帧图像与背景图像作帧差(如公式1所示),并对帧差图像作腐蚀处理(如公式2所示),按公式(3)统计腐蚀后帧差图像中非零像素点的总数并归一化;
[0068]
d(i,j)=abs(i
n
(i,j)-i0(i,j))
ꢀꢀꢀ
公式(1)
[0069]
d
e
=erode(d)
ꢀꢀꢀ
公式(2)
[0070]
[0071]
其中,m、n分别为图像的高宽,i
n
为当前帧图像,i0为背景图像,d为帧差图像,d
e
(i,j)表示腐蚀后的帧差图像第i行j列像素值,d为归一化的全局帧差特征;
[0072]
步骤3.进行遮挡判断
[0073]
3.1如果d>t1,则令c2=0,c1=c1+1,转步骤3.2;否则令c1=0,c2=c2+1,转步骤3.3;
[0074]
3.2如果c1>tc1,则令遮挡信号shade_flag=1,转步骤4;否则,转步骤7;
[0075]
3.3如果c2>tc2,则令遮挡信号shade_flag=0,转步骤7;否则,直接转步骤7;
[0076]
步骤4.缓存背景帧差
[0077]
4.1计算缓存向量大小,记为vector_size,
[0078]
4.2如果vector_size>16,则删除向量头部存储缓存帧差,并在向量尾部加入当前帧的帧差d;否则,在尾部直接加入当前帧的帧差d;
[0079]
步骤5.判断帧差变化趋势
[0080]
5.1按公式(4)计算缓存时段帧差变化率δd
[0081]
δd=vec[15]-vec[0]
ꢀꢀꢀ
公式(4)
[0082]
5.2如果δd<0,则令计数器c3=0,i=0,转步骤5.3;否则转步骤7;
[0083]
5.3如果i<15,则按公式(5)计算δd,转步骤5.4;否则转步骤6;
[0084]
δd=vec[i+1]-vec[i]
ꢀꢀꢀ
公式(5)
[0085]
5.4如果δd<0,则令计数器c3=c3+1,i=i+1,转步骤5.3;否则,令i=i+1,转步骤5.3;
[0086]
步骤6.进行误报警恢复判断
[0087]
6.1如果c3>tc3且d<t2,转步骤6.2;否则转步骤7;
[0088]
6.2复位遮挡信号,即令shade_flag=0;
[0089]
步骤7.返回,等待下一帧图像,执行步骤2。
[0090]
事实上,如附图1所示:
[0091]
1.遮挡检测中误报警过程中背景帧差是呈现一个先上升后下降的趋势,在n1时刻,帧差达到遮挡判断设定的阈值t1(t1=d1),此时由于设置连续多帧的判断机制,系统不会置位遮挡信号,如果不能满足连续多帧的条件,则系统会直接过滤掉这种帧差波动;如果在n1~n2之间满足连续多帧帧差达到设定阈值t1,则置位遮挡信号,系统发出遮挡预警;该遮挡判断阶段可用附图1中的s1区域表示;
[0092]
2.当系统被误遮挡并发出遮挡预警后,如果不采用本专利中的恢复方法,那么只有等背景帧差小于设定阈值t1(t1=d1)且满足连续多帧的判断机制,才能完成误报警恢复过程;这种情况下连续多帧的判断机制虽然增加了系统判断结果的可靠性,但是在误报警后,会增加恢复时间;如附图1中的s3区域所示,如果系统在n2帧时刻发生遮挡报警,在n5时刻才能恢复,其中误报警时间t1=n
5-n2;
[0093]
3.如果采用本专利提出的方法,在n2帧时刻发生报警后,系统会缓存连续n(n=vector_size)帧的帧差,按照步骤5计算帧差变化率,进而进行步骤6的判断;如果满足相应条件,即可进行遮挡信号的复位;如附图1中的s2区域所示,其中步骤6.1中的设定阈值t2=d2,系统在n3时刻就可以恢复误报警,其中误报警时间t2=n
3-n2;与不采用本专利方法相比较,减少误报警时间δt=t
1-t2=n
5-n3;
[0094]
4.如图1中s2区域放大图所示,该过程是一个背景帧差不断波动的过程,本专利提出的方法是结合缓存时段帧差变化率和时段内帧差下降频数来判断帧差的下降趋势。
[0095]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明实施例可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1