一种部分可观测信息下维修和备件供应联合优化方法
1.本发明属于机械系统的维修工程领域,具体涉及一种部分可观测信息下维修和备件供应联合优化方法。
背景技术:
2.不可修机械系统的维修和备件优化问题是实施维修活动的关键环节。在现有的维修模型中,广泛使用基于历史失效统计数据的可靠度分布用于更换模型和备件库存模型,解决诸如在满足经济性指标的情况下部件的最优更换时间和备件订购时间。此外,还需要优化备件的订购数量以及库存量,在满足备件可用度最大化的同时使得储存费用最小化。
3.传统的方法是使用基于部件的历史失效时间来确定寿命的可靠度函数,其反应了部件总体的统计特性,而未考虑各部件之间潜在的物理失效过程。在统计寿命分布的基础上,进行部件更换和备件订购的序贯优化决策。然而,该方法并未考虑部件个体的差异性,也无法描述单个个体的寿命分布函数。对于新研设备及大型或昂贵的关键设备,大多缺乏历史失效数据,因此也难以获得寿命的分布函数。近年来,先进的状态监测技术使得个体的剩余寿命预测成为可能,为基于预测信息的维修决策奠定了基础。
4.传统的维修和备件决策模型常常存在一些不够合理的假设,如假设部件的寿命分布函数已知、备件总是可用的或不考虑备件的交付时间等。虽有文献研究了基于寿命预测信息的部件更换和备件订购序贯优化决策,但其不是全局最优解,在工程实践中难以实施。
技术实现要素:
5.发明目的:本发明提供一种部分可观测信息下维修和备件供应联合优化方法,可充分利用系统的状态监测信息制定维系计划,指导维修工程师根据实际需要灵活的调整备件交付时间的分布。
6.技术方案:本发明所述的一种部分可观测信息下维修和备件供应联合优化方法,包括以下步骤:
7.(1)基于被监测的机械系统的实时多维状态监测数据,选取健康数据部分建立向量自回归模型,并计算整体数据集的残差,使得预处理的数据满足正态性和独立性;
8.(2)基于残差数据建立反映系统退化过程的隐马尔科夫模型,并用期望最大化算法估计隐马尔科夫模型中未知的状态参数和观测参数
9.(3)基于贝叶斯定理实时更新系统在每个采样时刻t
k
的剩余使用寿命的概率密度函数f(t|π
k
);
10.(4)将备件的交付时间考虑为随机变量而非传统的常量,以平均费用率最小化为目标,动态更新最优的部件更换时间和备件订购时间。
11.进一步地,所述步骤(1)实现过程如下:
12.对于传感器采集的多维状态监测数据,其表示为d 为数据
的维度;假设健康数据部分服从一个平稳的向量自回归过程:
[0013][0014]
其中,ε
n
为独立同分布,服从n
d
(0,∑);为模型的阶数;为自相关矩阵;为均值;为协方差;
[0015]
利用估计的var模型参数计算整体监测数据的残差y
n
;
[0016][0017]
其中,
[0018]
进一步地,所述步骤(2)实现过程如下:
[0019]
建立能反应被监测的机械系统退化的3状态,包括状态0、状态1和状态2 的隐马尔科夫模型,其中状态0代表健康状态,状态1代表不健康状态,状态2 代表失效状态;使用期望最大化算法估计隐马尔科夫模型中的状态参数和观测参数用π
k
表示在第k次采样时刻t
k
给定观测数据y
δ
,y
2δ
,...,条件下系统处于状态1的后验概率:
[0020]
π
k
=pr(x
k
=1|ξ>kδ,y
δ
,y
2δ
,...,y
kδ
)
ꢀꢀꢀ
(3)
[0021]
进一步地,所述步骤(3)实现过程如下:
[0022]
由贝叶斯定理,在每个采样点,后验概率π
k
可由下式迭代更新:
[0023][0024]
在采样时刻t
k
系统剩余寿命的条件可靠度函数为:
[0025][0026]
概率密度函数为:
[0027][0028]
在采样时刻t
k
(即第k次采样,总时间为kδ),部分可观测信息下维修和备件订购联合优化函数为:
[0029][0030]
其中,e(cc)为一个寿命周期内的期望总费用,e(cl)为一个寿命周期的期望时间长度,使得一个周期的平均费用率最小化的值即为对应的最优更换时间和备件订购时间约束条件表明备件订购时间应在当前采样时刻以及更换时间之前;若优化得出的备件订购时间在下次采样时间之后,那么不采取备件订购策略,继续进行下一次采样并更新最优的更换时间和备件订购时间;若备件订购时间在下次采样之前,则根据优化的更换时间和备件订购时间采取维修措施。
[0031]
进一步地,所述步骤(4)的实现过程如下:
[0032]
在采样时刻t
k
,备件订购时间、备件达到时间、更换时间和失效时间之间有五种可能的情况:在备件订购时间点之前部件发生失效;在备件已经发出订购和备件还未送达的时间点之间部件发生失效;在备件已送达和最优更换时间点之间部件发生失效;在备件已经发出订购要求,但在最优更换时间点之前备件并未送达;备件已送达,在最优更换时间之后部件发生失效;
[0033]
五种情况下的期望备件短缺时间分别用es1、es2、es3、es4和es5表示,各条件下期望备件短缺时间的计算方法分别如下:
[0034][0035][0036]
es3=0
ꢀꢀꢀ
(14)
[0037][0038]
es5=0
ꢀꢀꢀ
(16)
[0039]
五种情况下的期望备件短缺时间分别用eh1、eh2、eh3、eh4和eh5表示,各条件下期望备件持有时间的计算方法分别如下:
[0040]
eh1=0
ꢀꢀꢀ
(17)
[0041]
eh2=0
ꢀꢀꢀ
(18)
[0042][0043]
eh4=0
ꢀꢀꢀ
(20)
[0044][0045]
一个寿命周期内的期望备件短缺时间es为:
[0046]
es=es1+es2+es3+es4+es5
ꢀꢀꢀ
(22)
[0047]
一个寿命周期内的期望备件持有时间eh为:
[0048]
eh=eh1+eh2+eh3+eh4+eh5
ꢀꢀꢀ
(23)
[0049]
那么,一个寿命周期内的期望总费用e(cc)为:
[0050][0051]
一个寿命周期内的期望时间长度e(cl)为:
[0052][0053]
有益效果:与现有技术相比,本发明的有益效果:代替传统的基于失效时间分布的优化决策模型,本发明可充分利用系统的状态监测信息制定维系计划,指导维修工程师根据实际需要灵活的调整备件交付时间的分布,进而制定符合实际工程应用的最优维修决策。
附图说明
[0054]
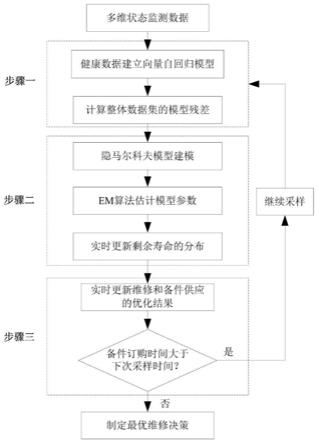
图1为本发明的流程图。
具体实施方式
[0055]
下面结合附图对本发明做进一步详细说明。
[0056]
如图1所示,本发明提供一种部分可观测信息下维修和备件供应联合优化方法,具体包括以下步骤:
[0057]
步骤1:基于被监测的机械系统的实时多维状态监测数据,选取健康数据部分建立向量自回归模型,并计算整体数据集的残差,使得预处理的数据满足正态性和独立性。
[0058]
对于传感器采集的多维状态监测数据,其表示为k 为数据的维度。假设健康数据部分服从一个平稳的向量自回归(var)过程:
[0059][0060]
其中ε
n
为独立同分布,服从n
k
(0,∑);为模型的阶数;为自相关矩阵;为均值;为协方差。多维状态监测数据指的是多个传感器采集的监测数
据,一个传感器采集的数据是一维的,一般一个系统会在不同位置安装多个传感器。
[0061]
利用估计的var模型参数可计算整体监测数据的残差y
n
:
[0062][0063]
其中,
[0064]
步骤2:基于残差数据建立反映系统退化过程的隐马尔科夫模型,并用期望最大化算法估计隐马尔科夫模型中未知的状态参数和观测参数基于贝叶斯定理实时更新系统在每个采样时刻t
k
的剩余使用寿命的概率密度函数f(t|π
k
)。
[0065]
基于整体残差数据,假设系统的退化过程符合3状态(状态空间s={0,1,2}) 的隐马尔科夫模型(hmm):健康状态(状态0)、警告状态或不健康状态(状态1)和失效状态(状态2)。状态0和状态1是不可观测的状态,即状态是隐藏的。只有状态2可直接被观测。假设系统总是起始于健康状态,即p(x0=0)=1。瞬态转移速率矩阵为:
[0066][0067]
其中,λ
01
,λ
02
,λ
12
∈(0,+∞)为模型中未知的状态参数,代表状态转移速率。
[0068]
用ξ=inf{t≥0:x
t
=2}表示系统的失效时间,δ为采样间隔。观测值在给定系统状态的条件下是独立的。用y
δ
,y
2δ
,...,表示d维观测值,那么在状态x下y
kδ
服从n
d
(μ
x
,∑
x
),x=0,1的d元正态分布,其概率密度函数为:
[0069][0070]
其中,为模型中未知的观测参数,分别代表各状态下的均值和协方差。
[0071]
假设收集到的n组状态监测失效数据,用f1,...,f
n
表示。失效数据f
i
用表示,t
i
为第i组数据的总采样数,失效时间为ξ
i
=t
i
,其中 t
i
δ<t
i
≤(t
i
+1)δ。假设收集到m组截尾数据,用s1,...,s
j
表示。同样地,截尾数据 s
j
用表示,失效时间ξ
i
>t
i
δ。用o={f1,...,f
n
,s1,...,s
m
}表示观测数据,k=(a,ψ|o)为相应的似然函数,其中a=(λ
01
,λ
02
,λ
12
),ψ=(μ0,μ1,∑0,∑1)为待估参数。由于隐马尔科夫模型状态过程的样本路径(x
t
:t≥0)是不可观测的,因此最大化似然函数的解析表达式难以求出。期望最大化(em)算法可通过迭代最大化伪似然函数求解。令和为待估参数的初值, em算法步骤如下:
[0072]
e
‑
step:计算伪似然函数:
[0073][0074]
其中为完全数据集,即观测数据集o每组失效数据f
i
和截尾数据s
j
增广了状态过程的不可观测的样本路径信息。
[0075]
m
‑
step:选取λ
*
,ψ
*
,使得
[0076][0077]
每步更新的参数λ
*
,ψ
*
再作为初值代入e
‑
step中,使得e
‑
step和m
‑
step迭代运算直至欧几里得范数其中ε为任意小的正数。
[0078]
最大化每步更新的期望值,可得到每步更新的状态参数和观测参数的估计值,即各参数导数为0的点。每步更新的的显式表达式如下:
[0079][0080][0081][0082]
每步更新的的显式表达式如下:
[0083][0084][0085]
其中:
[0086]
[0087][0088][0089][0090][0091]
在完成状态参数和观测参数估计后。用π
k
表示在时刻kδ给定观测数据y
δ
,y
2δ
,...,条件下系统处于状态1的后验概率:
[0092]
π
k
=pr(x
k
=1|ξ>kδ,y
δ
,y
2δ
,...,y
kδ
)
ꢀꢀꢀ
(12)
[0093]
由贝叶斯定理,在每个采样点,后验概率π
k
可由下式迭代更新:
[0094][0095]
其中初始值π0=0,p
ij
(t)=p(x
t
=j|x0=i)为转移概率矩阵。转移概率矩阵p
ij
(t)可对转移速率矩阵由kolmogorov向后微分方程求解。
[0096]
因此,在采样时刻t
k
系统剩余寿命的条件可靠度函数为:
[0097][0098]
概率密度函数为:
[0099][0100]
步骤3:将备件的交付时间考虑为随机变量而非传统的常量,以平均费用率最小化为目标,动态更新最优的部件更换时间和备件订购时间。
[0101]
在采样时刻t
k
(即第k次采样,总时间为kδ),备件订购时间、备件达到时间、更换时间和失效时间之间有五种可能的情况:
[0102]
1)在备件订购时间点之前部件发生失效;
[0103]
2)在备件已经发出订购和备件还未送达的时间点之间部件发生失效;
[0104]
3)在备件已送达和最优更换时间点之间部件发生失效。
[0105]
4)在备件已经发出订购要求,但在最优更换时间点之前备件并未送达。
[0106]
5)备件已送达,在最优更换时间之后部件发生失效。
[0107]
五种情况下的期望备件短缺时间分别用es1、es2、es3、es4和es5表示,各条件下期望备件短缺时间的计算方法分别如下:
[0108][0109][0110]
es3=0
ꢀꢀꢀ
(18)
[0111][0112]
es5=0
ꢀꢀꢀ
(20)
[0113]
其中,l为交付时间;f(l)为交付时间的概率密度函数;为t
k
时刻的备件订购时间,为t
k
时刻的部件更换时间。
[0114]
五种情况下的期望备件短缺时间分别用eh1、eh2、eh3、eh4和eh5表示,各条件下期望备件持有时间的计算方法分别如下:
[0115]
eh1=0
ꢀꢀꢀ
(21)
[0116]
eh2=0
ꢀꢀꢀ
(22)
[0117][0118]
eh4=0
ꢀꢀꢀ
(24)
[0119][0120]
由上述分析可得,一个寿命周期内的期望备件短缺时间es为:
[0121]
es=es1+es2+es3+es4+es5
ꢀꢀꢀ
(26)
[0122]
一个寿命周期内的期望备件持有时间eh为:
[0123]
eh=eh1+eh2+eh3+eh4+eh5
ꢀꢀꢀ
(27)
[0124]
那么,一个寿命周期内的期望总费用e(cc)为:
[0125][0126]
一个寿命周期内的期望时间长度e(cl)为:
[0127][0128]
综合以上分析,基于预测信息的更换和备件订购联合优化函数为:
[0129][0130]
上式中,使得一个周期的平均费用率最小化的值即为最优的更换时间和备件订购时间约束条件表明备件订购时间应在当前采样时刻以及更换时间之间。
[0131]
若优化得出的备件订购时间大于下次采样时间,那么不采取备件订购策略,继续进行下一次采样。若备件订购时间在下次采样之前,则根据优化的更换时间和备件订购时间采取维修措施。
[0132]
虽然本发明已以较佳实施例揭露如上,然其并非用以限定本发明。本发明所属技术领域中具有通常知识者,在不脱离本发明的精神和范围内,当可作各种的更动与润饰。因此,本发明的保护范围当视权利要求书所界定者为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1