河流黑水排放检测方法及应用其的识别系统与流程
1.本发明涉及污水监控技术领域,具体而言,涉及一种河流黑水排放检测方法及应用其的 识别系统。
背景技术:
2.目前国内监管部门对黑色污水偷排漏排的企业的排污监管方式还是停留在依靠人工现场 排查、人工远程查看排污口摄像头或有群众投诉时再对企业进行督查。对企业黑色污水的排 放监管只能依靠每月或每季度的抽样检测数据为参考。现有的图像识别技术对光照条件良好, 待识别目标物较清晰的图像,可以做到较高的准确率。但是在实际场景中,我们经常会遇到 各种因素干扰,例如阴天光照影响大、拍摄的图像不像标准数据集没有经过筛选,图像质量 很不统一,因此不能有效地直接以图像视频作出简单的黑水排放结论。
技术实现要素:
3.本发明的目的在于,为克服现有技术的不足而提供有一种河流黑水排放检测方法,以及 应用该河流黑水排放检测方法的河流黑水排放识别的识别系统。
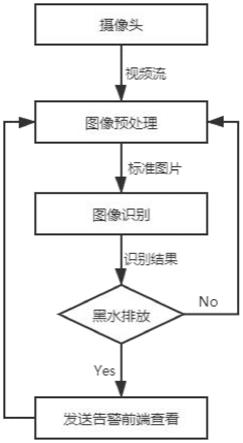
4.河流黑水排放检测方法,其包括以下步骤:
5.s1、获取有检测图像;
6.s2、对所述检测图像进行图像预处理,获取有标准图像;所述图像预处理过程包括去反 光处理步骤;
7.s3、对所得标准图像进行图像识别处理,以获取有识别结果;
8.s4、当所得识别结果确认为存在黑水排放状态时,发送有告警信息。
9.进一步地,于步骤s2,所述去反光处理步骤包括:
10.s2
‑
1、光照区域颜色特征分析,得到有光照区域颜色特征;
11.s2
‑
2、通过k
‑
means聚类算法进行聚类,得到有k个聚类中心;
12.s2
‑
3、根据所得光照区域颜色特征,将k个聚类中心中rgb像素值最高的类别判断为反 光区域,并使用反光区域附近的像素进行填补替换。
13.进一步地,于步骤s2,所述图像预处理过程还包括图像去噪处理步骤,所述图像去噪处 理步骤应用有non
‑
localmeans降噪算法进行去噪。
14.进一步地,于步骤s3,所述图像识别处理过程包括颜色特征区别识别步骤。
15.进一步地,所述颜色特征区别识别步骤包括以下步骤:
16.s3
‑
1、获取有历史颜色特征区别数据,并以此设定有水源基准颜色范围特征及排放黑水 基准颜色范围特征;
17.s3
‑
2、根据所得标准图像进行相应的颜色范围参照认定,以历史颜色特征区别数据为依 据,当所述标准图像中的颜色特征与所述水源基准颜色范围特征及黑水基准颜色范围特征吻 合时,该识别结果判断为存在黑水排放状态。
18.进一步地,所述图像识别处理过程,包括以上述颜色特征区别识别步骤为基准,选取有 训练集图片;以该训练集图片进行有基于squeezenet架构的图像识别模型训练,并以训练所 得的图像识别模型进行有识别处理。所述训练集图片中包括有黑水排放状态认定图片及非黑 水排放状态认定图片两类。
19.进一步地,于步骤s3,所述图像识别处理过程,其包括采用投票队列对检测结果进行投 票处理。
20.本发明的河流黑水排放检测方法的识别系统,其包括应用有如上述所述的河流黑水排放 检测方法进行河流黑水排放的检测识别。
21.本发明的有益效果在于:
22.基于应用有该河流黑水排放检测方法的应用,使得有识别系统能有效地排除水体反光的 影响,以进行黑水排放的准确检测,确保在黑水排放初期即可作出识别反应,以避免黑水的 非法排放情况。
附图说明
23.图1为本发明的河流黑水排放检测方法应用流程示意图;
24.图2为本发明的河流黑水排放检测方法中的rgb像素映射规则示意图;
25.图3为本发明的河流黑水排放检测方法中的反光区域量化前图像示意图;
26.图4为本发明的河流黑水排放检测方法中的反光区域量化后图像示意图;
27.图5为本发明的河流黑水排放检测方法中的去反光前图像示意图;
28.图6为本发明的河流黑水排放检测方法中的去反光后图像示意图;
29.图7为本发明的河流黑水排放检测方法中的图像预处理前图像示意图;
30.图8为本发明的河流黑水排放检测方法中的图像预处理后图像示意图;
31.图9为本发明的河流黑水排放检测方法中的file模块的核心架构示意图;
32.图10为本发明的河流黑水排放检测方法中的模型量化示意图。
具体实施方式
33.为了使本发明的技术方案、目的及其优点更清楚明白,以下结合附图及实施例,对本发 明进行进一步的解释说明。
34.本发明的一种用于河流黑水排放识别的识别系统,其包括针对各河流流道废水排放口位 置设置的多个摄像头,各摄像头通讯链接呈局域网设置有采用边缘检测的树莓派设备;树莓 派使用rtsp协议从摄像头实时地获取有其对应废水排放口位置区域的水面环境情况视像数 据,并以此截取有即时的单张检测图像。
35.基于截取的检测图像不确定性情况,我们需对其进行有图像预处理,则所获取的检测图 像将发送至后台的图像预处理模块进行预处理。具体而言,该图像预处理过程包括以此设置 有图像去噪处理步骤、去反光处理步骤及调整图像尺寸操作步骤。
36.所述图像去噪处理的过程如下:由于获取的检测图像是户外采集,在光源不恒定的情况 下会有比较多随机噪声干扰,图像不同位置的噪声干扰值不一致,经过试验分析采用 non
‑
localmeans降噪算法,利用整幅图像进行去噪,以图像块为单位在图像中寻找相似区域, 再对这些区域进行求平均,能够比较好的去除图像中存在的高斯噪声。其中nlm的降
噪公 式定义如下:
37.给定一个离散的噪声图像v={v(i),i∈i},对于一个像素i的估计值nl[v](i),可以表示为图 像中所有像素的加权平均值:
[0038][0039]
其中w表示权重,衡量相似度的方法有很多,最常用的是根据两个像素亮度差值的平方 来估计。由于有噪声,单独的一个像素并不可靠,所以使用它们的邻域,只有邻域相似度高 才能说这两个像素的相似度高。衡量两个图像块的相似度最常用的方法是计算他们之间的欧 氏距离:
[0040][0041][0042]
该去反光处理的过程如下:
[0043]
实际场景下的水面由于在室外所以有很强的太阳光照干扰,经过分析光照区域的颜色特 征,采用颜色量化后然后使用无监督聚类算法,找出图像中反光区域,然后对反光区域进行 替换,具体说明如下:
[0044]
(1)结合实际场景,河面中的光照区域的颜色亮度要明显高于非光照区域,即光照区域 的rgb各参数值要高于非光照区域的rgb值,以此颜色特征作为判断反光区域的依据。
[0045]
(2)为了节省存储空间,先对图像进行颜色量化,在该过程中,将尽可能保留图像的颜 色外观的同时,减少颜色的数量。
[0046]
将rgb像素值按照如图2的规则进行像素表示。
[0047]
则反光区域量化前后图像如图3及图4所示。
[0048]
(3)进行图像量化后,利用k
‑
means聚类算法,将图像像素分成k个类别,k
‑
means 聚类算法实现步骤如下:
[0049]
3.1随机选取k个点作为聚类中心;
[0050]
3.2计算每个点分别到k个聚类中心的聚类,然后将该点分到最近的聚类中心,形成k 个簇;
[0051]
3.3重新计算每个簇的质心;
[0052]
3.4重复3.2
‑
3.4步,直到质心的位置不再发生变化或者达到设定的迭代次数。
[0053]
(4)通过k
‑
means聚类后,将得到k个聚类中心,根据之前分析的光照区域颜色特征, 将k个聚类中心中rgb像素值最高的类别判断为反光区域,并使用反光区域附近的像素进行 填补替换。
[0054]
则通过该去反光处理的前后图像如图5及图6所示。
[0055]
调整图像尺寸操作步骤情况如下:使用按长宽比例缩放图像而不是使用拉伸缩放图像, 减小图像大小变化带来的失真。
[0056]
则相应的检测图像通过该图像预处理过程后,可得到有相应的标准图像,以用于进行后 续图像识别处理过程;该图像预处理过程前后的反光区域处理图样如图7及图8所
示。
[0057]
所述图像识别处理过程如下:
[0058]
基于所获取的标准图像,若存在黑水排放的情况,则该标准图像中将具有水源与排放黑 水之间的颜色特征区别。而基于所收集的大量黑水排放历史样本作为相应的历史颜色特征区 别数据以作参考,明确并设定有参考情况下的水源基准颜色范围特征及排放黑水基准颜色范 围特征。则在该图像识别处理过程中,是在于对标准图像中的颜色特征进行图像识别处理, 若根据所得标准图像进行相应的颜色范围参照认定,以历史颜色特征区别数据为依据,当所 述标准图像中的颜色特征与所述水源基准颜色范围特征及黑水基准颜色范围特征吻合时,该 识别结果判断为存在黑水排放状态;反之,则判断为非黑水排放状态,继续下一周期的检测 图像获取及图像预处理步骤,以作再次的图像识别处理准备;其大概流程如图1所示。
[0059]
作为一优选的实施方式,本发明的图像识别处理过程可基于上述判断逻辑,选取有包括 黑水排放状态认定图片及非黑水排放状态认定图片两类作为训练集图片;以该训练集图片训 练应用有图像识别模型以进行图像识别判断。本实施例中,可选择一种基于squeezenet架构 的图像识别模型进行应用,其针对河道水面这一特殊环境,经训练过程以作模型结构的调整, 使得模型能有效地作出准确的判断识别处理。
[0060]
此外,本系统设定有检测图像时间间隔,如15s;则每隔检测图像时间间隔时,将获取摄 像头图像数据并进行图像处理后检测,将检测结果存入防误差干扰检测队列。每当防误差检 测队列满队后,在队列中采取多数投票获取该时间段检测结果。例如:该防误差干扰检测队 列里存入有5个检测结果,其中两个识别判断结果为非黑水排放状态,其中三个识别判断结 果为黑水排放状态,则以少数服从多数原则,去综合地认定该次状态为黑水排放状态。基于 该投票判定的应用,能有效地提高识别准确率,避免误告警的情况。
[0061]
对于上述的squeezenet架构应用,它是由若干个fire模块结合卷积网络中卷积层,降采 样层,全连接等层组成的。一个fire模块由squeeze部分和expand部分组,squeeze部分是 一组连续的1*1卷积进行降维,expand部分则是由一组连续的1*1卷积和一组连续的3*3卷 积组合升维,file模块的核心架构如图9所示。
[0062]
由于采用树莓派进行部署在节省了大量带宽的同时对树莓派的计算速度会有比较高要 求,所以在训练后的模型上使用模型量化进行加速,量化方式使用混合float16和int8精 度进行量化,采用量化是因为模型属于同一层的参数值会分布在一个较小的区间内,比如[
‑
20, 50]之间,我们可以记下这个最小值和最大值,采用8位或16位数量化的情况下,例如int8 量化把同一层的参数都做线性映射,从区间[
‑
20,50]到区间[0,255],例如
‑
20映射到0,50映射 到255,那么原始区间中10.0就变为取整(10
‑
(
‑
20))*255/(50
‑
(
‑
20))得109,float16量 化与int8量化采用方法一样,float16将32位浮点数映射到16位浮点数,以减少量化的 模型准确率损失,我们采用混合量化的方式,对浮点部分小数位数大于3的部分用float16 量化。量化在模型中逐层进行的,其中单层整数量化流程图如图10所示。
[0063]
映射量化后整数计算的时间远小于浮点数,模型量化后速度提高了2倍,在树莓派下运 行该模型可以达到3fps的检测速度,该应用可有效地满足当前场景下黑水检测的速度需求。
[0064]
当所得识别结果确认为黑水排放状态时,该图像识别模型将发送有告警信息至服
务器终 端;并同时上传相应的检测图像与其截图前后30秒的视频视像,以用于终端工作人员进行远 程的复核确认,为管理者、现场执法人员提供有力辅助工具。通过复核确认的过程,以有效 地确认是真实黑水排放还是误报,实现了检测和复核的实时在线监管。更加方便管理部门的 远程管理、远程复核,提高了监测效率。
[0065]
以上所述仅为本发明的优选实施方式,对于本技术领域的技术人员,在不脱离本发明的 实施原理前提下,依然可以对所述实施例进行修改,而相应修改方案也应视为本发明的保护 范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1