基于物联网的磁痕缺陷自动识别方法与流程
[0001]
本发明涉及基于物联网的磁痕缺陷自动识别方法,属于器材无损检测技术领域。
背景技术:
[0002]
磁粉检测是无损检测五大常规方法之一,是铁磁性材料表面缺陷检测中用得最多、最成熟的方法,磁粉探伤技术自诞生以来已经有八十余年的历史。随着磁化技术的不断完善与成熟,以及计算机的快速普及使用,使得磁粉探伤应用技术也得到了不断地发展与进步,在检测灵敏度与精度等方面得到了显著的提升。但是由于设备app之间没有涉及到网络数据库模式,所以现行使用的大部分磁粉探伤设备始终沿用检测结果由现场操作人员对磁化零件采用人工观察的方法进行零件缺陷有无的识别判断。这一过程存在着如下缺点:工作力度大、检测速度慢、工作效率低、对操作人员而言工作内容单调重复,导致漏检率高,荧光磁粉探伤工作现场紫外光较强对长时间工作的人员容易造成比较严重的身体伤害,并且不利于信息管理。所以对零件缺陷有无的判断急需要进行智能化改进。
[0003]
目前磁痕缺陷识别中还处于手动或低智能化状态,磁痕探伤过程中缺陷不能实时准确的将有缺陷的部分自动识别并保存和通知设备报警,尤其是现在物联网的兴起,不能很好的借助物联网的优势对磁痕探伤过程进行实时智能识别及保存通知实时探伤结果,导致磁痕探伤过程中工人工作强度大,工作效率低。
技术实现要素:
[0004]
针对现有技术的不足,本发明的目的在于提供一种基于物联网的磁痕缺陷自动识别方法,解决了现有技术中出现的问题。
[0005]
本发明所述的基于物联网的磁痕缺陷自动识别方法,包括以下步骤:
[0006]
步骤1:在磁痕探伤的过程中,对探伤的工件进行实时图像采集读取;
[0007]
步骤2:对上述步骤1中实时采集读取的视频图像逐帧分解;
[0008]
步骤3:对上述步骤2中分解的帧图像进行图像预处理;
[0009]
步骤4:对上述步骤3中预处理图像进行可疑伤痕特征提取;
[0010]
步骤5:对上述步骤4中提取的伤痕特征信息进行伤痕智能判断;
[0011]
步骤6:对上述步骤5中判断为伪的图像丢弃掉,进入下一帧图像重复步骤2;
[0012]
步骤7:对于上述步骤5中判断为真的伤痕图像进行处理;
[0013]
步骤8:将上述处理完成伤痕信息保存并对外发送。
[0014]
进一步的,所述的步骤2中实时采集读取的实时视频图像逐帧分解具体包括以下步骤:
[0015]
步骤21:对上传实时视频图像进行实时解压处理;
[0016]
步骤22:对解压视频图像进行集合处理,使用队列加字典的结构对加压后的视频图像进行处理。
[0017]
进一步的,步骤3中图像预处理具体包括以下步骤:
[0018]
步骤31:对图像进行滤波处理,采用高斯-拉普拉斯算法和中值滤波,滤除掉图像中存在的椒盐噪音;
[0019]
步骤32:对步骤31中滤波后的图像进行二值化处理和图像平滑度操作,提高图像的对比度;
[0020]
步骤33:对步骤32中处理的图像使用索贝尔算子进行区域分割。
[0021]
进一步的,步骤4中对预处理图像进行特征信息提取,具体包括以下步骤:
[0022]
步骤41:对分割处理后的图像区域逐个进一步进行局部二值化操作;
[0023]
步骤42:对二值化后的图像进行过滤,保留可疑磁痕区域作为对比区域;
[0024]
步骤43:对步骤42中得到的二值图像为前景掩码,提取可疑伤痕区域中的疑似伤痕与背景的亮度比;
[0025]
步骤44:以步骤43中得到的可疑伤痕边缘检测结果,提取可疑伤痕区域中的疑似伤痕的边界链码统计特征;
[0026]
步骤45:提取可疑伤痕区域的hog特征。
[0027]
进一步的,步骤5中对提取的特征信息进行识别,具体包括如下步骤:
[0028]
步骤51:将步骤4中提取的伤痕特征形成特征向量,使用样本机器学习得到的识别器对特征向量做出设别,判定可疑伤痕区域中疑似伤痕的真伪;
[0029]
步骤52:机器学习识别器使用bp神经网络进行构建,bp神经网络使用经典的三层网络;
[0030]
步骤53:将提取的特征向量输入到bp神经网络中,与样品训练数据库中的数据进行比较,确定特征的置信度;
[0031]
步骤54:根据置信度和设定的阈值对比来确定在测图像是否为伤痕图像;
[0032]
步骤55:根据置信度和设定的阈值对比来确定在测图像是否为伤痕图像;
[0033]
步骤56:对可疑伤痕区域中的所有疑似伤痕循环进行步骤51到步骤55的操作,直到可疑伤痕区域中的所有疑似伤痕都进行了真伪判定;
[0034]
进一步的,步骤7中对判断为真的图像进行整合,整合包括对原图像的图像滤噪和图像增强。
[0035]
进一步的,步骤8中对步骤7中经过滤噪和图像增强后的伤痕图像进行保存,并通过网络发送给设备。
[0036]
本发明与现有技术相比,具有如下有益效果:
[0037]
本发明所述的基于物联网的磁痕缺陷自动识别方法,基于物联网技术,结合图像识别和bp神经网络分析,对磁痕缺陷探伤过程进行实时数据采集、分析、决策和结果保存推送,将传统的磁粉检测技术充分地与图像处理技术融合到一起,提高工件识别率和判别精确度。解决了现有技术中存在的问题。
附图说明
[0038]
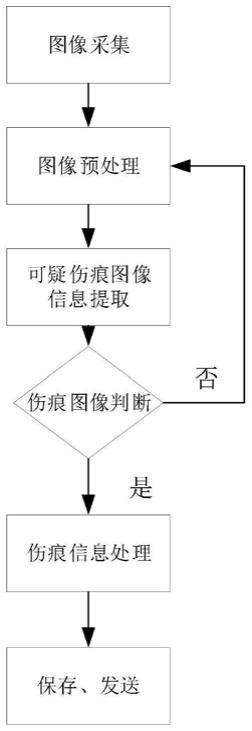
图1为本发明实施例中方法的流程图;
[0039]
图2为本发明实施例中图形识别的步骤流程图。
[0040]
下面结合附图和实施例对本发明作进一步的说明:
[0041]
实施例1:
[0042]
如图1所示,本发明所述的一种基于物联网的磁痕缺陷自动识别方法,包括以下步骤:
[0043]
步骤1:在磁痕探伤的过程中,对探伤的工件进行实时图像采集读取;
[0044]
步骤2:对上述步骤1中实时采集读取的视频图像逐帧分解;
[0045]
步骤3:对上述步骤2中分解的帧图像进行图像预处理;
[0046]
步骤4:对上述步骤3中预处理图像进行可疑伤痕特征提取;
[0047]
步骤5:对上述步骤4中提取的伤痕特征信息进行伤痕智能判断;
[0048]
步骤6:对上述步骤5中判断为伪的图像丢弃掉,进入下一帧图像重复步骤2;
[0049]
步骤7:对于上述步骤5中判断为真的伤痕图像进行处理;
[0050]
步骤8:将上述处理完成伤痕信息保存并对外发送。
[0051]
步骤2中实时采集读取的实时视频图像逐帧分解具体包括以下步骤:
[0052]
步骤21:对上传实时视频图像进行实时解压处理;
[0053]
步骤22:对解压视频图像进行集合处理,使用队列加字典的结构对加压后的视频图像进行处理。
[0054]
步骤3中图像预处理具体包括以下步骤:
[0055]
步骤31:对图像进行滤波处理,采用高斯-拉普拉斯算法和中值滤波,滤除掉图像中存在的椒盐噪音;
[0056]
步骤32:对步骤31中滤波后的图像进行二值化处理和图像平滑度操作,提高图像的对比度;
[0057]
步骤33:对步骤32中处理的图像使用索贝尔算子进行区域分割。
[0058]
步骤4中对预处理图像进行特征信息提取,具体包括以下步骤:
[0059]
步骤41:对分割处理后的图像区域逐个进一步进行局部二值化操作;
[0060]
步骤42:对二值化后的图像进行过滤,保留可疑磁痕区域作为对比区域;
[0061]
步骤43:对步骤42中得到的二值图像为前景掩码,提取可疑伤痕区域中的疑似伤痕与背景的亮度比;
[0062]
步骤44:以步骤43中得到的可疑伤痕边缘检测结果,提取可疑伤痕区域中的疑似伤痕的边界链码统计特征;
[0063]
步骤45:提取可疑伤痕区域的hog特征。
[0064]
步骤5中对提取的特征信息进行识别,具体包括如下步骤:
[0065]
步骤51:将步骤4中提取的伤痕特征形成特征向量,使用样本机器学习得到的识别器对特征向量做出识别,判定可疑伤痕区域中疑似伤痕的真伪;
[0066]
步骤52:机器学习识别器使用bp神经网络进行构建,bp神经网络使用经典的三层网络;
[0067]
步骤53:将提取的特征向量输入到bp神经网络中,与样品训练数据库中的数据进行比较,确定特征的置信度;
[0068]
步骤54:根据置信度和设定的阈值对比来确定在测图像是否为伤痕图像;
[0069]
步骤55:根据置信度和设定的阈值对比来确定在测图像是否为伤痕图像;
[0070]
步骤56:对可疑伤痕区域中的所有疑似伤痕循环进行步骤51到步骤55的操作,直到可疑伤痕区域中的所有疑似伤痕都进行了真伪判定;
[0071]
步骤7中对判断为真的图像进行整合,整合包括对原图像的图像滤噪和图像增强。
[0072]
步骤8中对步骤7中经过滤噪和图像增强后的伤痕图像进行保存,并通过网络发送给设备。
[0073]
本实施例的工作原理为:
[0074]
(1)图像处理
[0075]
首先对实时采集读取的视频图像解压逐帧分解,视频图像格式可以是.mp4格式或其他格式。对帧图像进行集合处理,可以使用队列加字典的结构对帧图像进行处理。
[0076]
接着对图像集合中的帧图像进行预处理,预处理方式很多,针对磁粉工件图像需要先对其进行滤波处理,采用高斯-拉普拉斯算法和中值滤波,滤除掉图像中存在的椒盐噪音;对滤波后的图像进行二值化处理和图像平滑度操作,提高图像的对比度;
[0077]
最后对处理的帧图像使用索贝尔算子进行区域分割,方便后期输入识别模块进行缺陷识别。
[0078]
(2)特征值提取
[0079]
对分割处理后的图像区域逐个进一步进行局部二值化操作。对二值化后的图像进行过滤,保留可疑磁痕区域作为对比区域。对得到的二值图像为前景掩码,提取可疑伤痕区域中的疑似伤痕与背景的亮度比。接着从得到的可疑伤痕边缘检测结果,提取可疑伤痕区域中的疑似伤痕的边界链码统计特征。紧接着提取可疑伤痕区域的hog特征。
[0080]
最后将提取的特征值形成特征向量,作为bp神经网络的输入值。其中,特征向量包括各分割图像的长度、宽度、面积、长宽比、亮度以及灰度值等。
[0081]
(3)图像特征信息识别
[0082]
如图2所示,对提取的伤痕特征信息进行伤痕智能判断时,首先进行分割图像的缺陷特征提取,然后将提取的特征值组合成特征向量,用于识别器模块的输入向量。然后将特征向量输入进bp神经网络识别器,bp神经网络识别器分为多个分模块,用于各分割图像的缺陷识别。
[0083]
识别器对是否为缺陷图像进行设别,识别为真则输出到结果,识别为假则直接过滤掉。当识别结果中超过1/5的识别器结果为真时,则判定该帧图像为缺陷图像,进而保存并报警。
[0084]
机器学习识别器使用训练后的bp神经网络进行构建,bp神经网络使用经典的三层网络:输入层,选取分割图特征值数据,作为输入层的输入数据。根据上述可知影响识别结果的特征值为6项参数,因此输入层的节点数为6,输入向量=(x1+x2+x3+
…
+x6),然后进行统一的变换处理,以使输入的目标值在区间[0,1]中,对数据进行归一化处理,公式如下:
[0085][0086]
隐含层个数由经验公式推导,即其中n1为隐含层个数,n为输入层个数,m为输出层个数,a为[1,10]之间的常数,即隐含层个数最大为12,
[0087]
传递函数应用的是非线性函数logsig()。其中计算出0到1之间的输出。本实例选用多输入多隐含的神经元与单输出的bp神经网络。其中,bp神经网络输入节点由x
i
表示,而隐含层节点由y
j
表示,输出节点由o
l
表示,w
ij
为输入节点和隐藏节点网络
权值,t
j
为隐藏层节点和输出节点网络权值。
[0088]
隐含层,对于隐含层节点的个数的设置,在本实例中,先设置10个节点,再进行不断的训练,通过误差分析来逐步增减隐含层的神经元数目,直至得到满意的性能,计算公式如下:
[0089][0090]
w
ij
表示节点i和节点j之间的权值,首先随机化权值的大小,取(-1,1)之间的随机数,通过训练调整权值的大小。
[0091]
输出层,输出层节点数为标签个数,神经元的传递函数用非线性变换函数sigmoid函数,计算公式如下:
[0092][0093]
通过函数s(x)的计算,得出输出节点的值,数值为[0,1]之间的数,通过概率的大小对识别结果进行判断。数值越大,缺陷概率就越大。根据置信度和设定的阈值对比来确定在测图像是否为缺陷图像,当各分识别器中有1/5存在判断为真的缺陷图像时,就判断此帧图像为缺陷图像;最后将图像集合发送给客户端进行保存和报警。
[0094]
采用以上结合附图描述的本发明的实施例的基于物联网的磁痕缺陷自动识别方法,基于物联网技术,结合图像识别和bp神经网络分析,对磁痕缺陷探伤过程进行实时数据采集,分析,决策和结果保存推送,将传统的磁粉检测技术充分地与图像处理技术融合到一起,提高工件识别率和判别精确度。但本发明不局限于所描述的实施方式,在不脱离本发明的原理和精神的情况下这些对实施方式进行的变化、修改、替换和变形仍落入本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1