一种面向地铁列车自动驾驶的在线能量混杂反馈控制方法与流程
1.本发明属于列车运行优化技术领域,主要涉及一种面向地铁列车自动驾驶的在线能量优化混杂反馈控制方法。
背景技术:
2.地铁以其速度快、运量大、准时安全等特点,成为支撑城市公共交通的重要方式之一。与此同时,地铁的运行能量消耗也大得惊人。为了响应国家“节约电能,绿色发展”的号召,也为了提高地铁运营管理公司的经济效益,大力发展列车节能运行越来越重要。
3.目前,列车节能运行主要是离散的生成最优节能速度曲线,在线跟踪离线生成的最优节能速度曲线。离线的生成最优速度曲线可以找到全局最优解,其中动态规划方法可以找到全局最优解,离线生成最优节能速度曲线,在搜索精度要求较高的时候计算量较大大。但当实际运行过程中运行会出现干扰,在线跟踪最优曲线误差会被累积,使得列车行驶偏离实际最优解。
技术实现要素:
4.本发明的目的在于针对现有方法的缺陷,提供面向地铁列车自动驾驶的在线能量优化混杂反馈控制方法,以位置作为自变量在线获取列车的状态,应用模态切换思想降低动态规划计算时间,利用动态规划算法实时求解列车最优切换控制序列及最优模态序列,该方法具有充分利用模态切换思想、在线控制列车等优点。
5.为解决上述技术问题,本发明通过以下技术方案进行实施:
6.一种面向地铁列车自动驾驶的在线能量优化混杂反馈控制方法,该优化方法包括如下步骤:
[0007][0008]
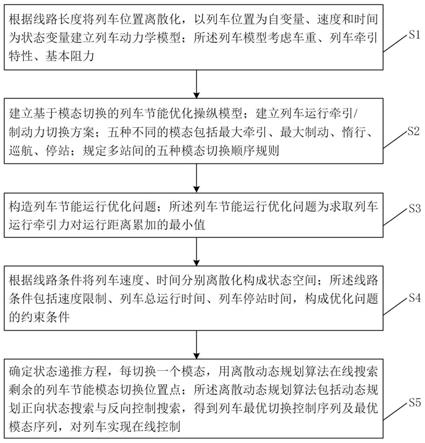
s1、根据线路长度将列车位置离散化,以列车位置为自变量、速度和时间为状态变量建立列车动力学模型;所述列车模型考虑车重、列车牵引特性、基本阻力;
[0009]
s2、建立基于模态切换的列车节能优化操纵模型;建立列车运行牵引/制动力切换方案;五种不同的模态包括牵引加速、制动减速、惰行、巡航、停站;规定多站间的五种模态切换顺序规则;
[0010]
s3、构造列车节能运行优化问题;所述列车节能运行优化问题为求取列车运行牵引力对运行距离累加的最小值;
[0011]
s4、根据线路条件将列车速度、时间分别离散化构成状态空间;所述线路条件包括速度限制、列车总运行时间、列车停站时间,构成优化问题的约束条件;
[0012]
s5、确定状态递推方程,每切换一个模态,用离散动态规划算法在线搜索剩余的列车节能模态切换位置点;所述离散动态规划算法包括动态规划正向状态搜索与反向控制搜索,得到列车最优切换控制序列及最优模态序列,对列车实现在线控制。
[0013]
进一步的,所述步骤s1中,所述列车动力学模型为:
[0014][0015]
其中,将列车总运行距离按照位置等间隔离散化得到k个δx,k代表离散的总阶段数,k为位置的索引,x
k
为第k个δx的位置,v
k
,t
k
分别代表列车在位置x
k
对应速度、时间,u
k
为切换控制,u
k
∈{0,1},w
k
(u
k
)代表位置x
k
列车所处的模态,m代表列车质量,为列车处于w
k
(u
k
)模态的牵引/制动力,r(v
k
)代表列车所受的基本阻力。
[0016]
进一步的,所述步骤s1中,所述列车基本阻力为:
[0017]
r(v
k
)=r0+r1|v
k
|+r2v
k2
[0018]
其中,前两项表示列车机械阻力,最后一项表示列车空气阻力,参数r0,r1,r2由列车型号和质量确定。
[0019]
进一步的,所述步骤s2中,列车运行牵引/制动力切换方案如下:
[0020]
u
k
=0:表示在位置x
k
保持现有模态不切换,列车运行牵引/制动力如下:
[0021]
第一模态
‑
牵引加速模态:
[0022]
f
1(0)
(v
k
)=t(v
k
)
[0023]
其中,t(v
k
)为列车牵引加速力,满足列车牵引特性。
[0024]
第二模态
‑
巡航模态:
[0025]
f
2(0)
(v
k
)=r(v
k
)
[0026]
其中,r(v
k
)代表列车所受的基本阻力。
[0027]
第三模态
‑
惰行模态:
[0028]
f
3(0)
(v
k
)=0
[0029]
第四模态
‑
制动减速模态:
[0030]
f
4(0)
(v
k
)=
‑
b(v
k
)
[0031]
其中,b(v
k
)为列车制动减速力,满足列车制动特性。
[0032]
第五模态
‑
停站模态:
[0033]
f
5(0)
(v
k
)=0
[0034]
u
k
=1:表示在位置x
k
切换至下一模态,列车运行牵引/制动力如下:
[0035]
第一模态
→
第二模态:
[0036]
f
1(1)
(v
k
)
→
f
2(0)
(v
k
)=r(v
k
)
[0037]
第二模态
→
第三模态:
[0038]
f
2(1)
(v
k
)
→
f
3(0)
(v
k
)=0
[0039]
第三模态
→
第四模态:
[0040]
f
3(1)
(v
k
)
→
f
4(0)
(v
k
)=
‑
b(v
k
)
[0041]
第四模态
→
第五模态:
[0042]
f
4(1)
(v
k
)
→
f
5(0)
(v
k
)=0
[0043]
第五模态
→
第一模态:
[0044]
f
5(1)
(v
k
)
→
f
1(0)
(v
k
)=t(v
k
)
[0045]
进一步的,所述步骤s2中,规定多站间的五种模态切换顺序规则如下:
[0046]
w
k
(1)=1
→
w
k
(0)=2
[0047]
w
k
(1)=2
→
w
k
(0)=3
[0048]
w
k
(1)=3
→
w
k
(0)=4
[0049]
w
k
(1)=4
→
w
k
(0)=5
[0050]
w
k
(1)=5
→
w
k
(0)=1
[0051]
其中,u
k
=0代表模型不切换,在位置x
k
模态w
k
不发生改变;u
k
=1模态切换,在位置x
k
模态w
k
按照切换顺序规则切换到下一模态。
[0052]
进一步的,所述步骤s3中,所述列车节能运行优化问题为:
[0053][0054][0055]
其中,j为多站间总能耗,为非负函数。
[0056]
进一步的,所述步骤s4中,所述优化问题的约束条件为:
[0057][0058]
其中,分别代表位置为模态5对应的速度与时间,v
max
为线路速度限制。t为规定的多站间总运行时间,t
s
为规定的列车停站时间,t
a
为允许的总运行时间偏差,v0,t0分别为列车起始位置的速度和时间,t
k
为列车终端位置的时间。
[0059]
进一步的,所述步骤s4中,在位置x
k
满足所有约束的速度、时间分别以δv,δt等间隔离散化。
[0060]
进一步的,所述步骤s5中,所述状态递推方程为:
[0061][0062]
其中,k,i,j,p分别为位置、速度、时间、模态的索引,x
k
为第k个δx的位置,为x
k
位置的第i个速度值,为x
k
位置的第j个时间值,为列车状态,为列车状态,为列车在状态下的第p个模态,为列车从起始状态到状态的最小能耗,为列车从状态到状态的能耗,j
*
(x0,v0,t0)为列车在起始状态的能耗。
[0063]
进一步的,所述步骤s5中,所述每切换一个模态,用离散动态规划算法搜索剩余的
列车节能模态切换位置点包括如下步骤:
[0064]
列车行驶在位置x
k
时:
[0065]
正向状态搜索:
[0066]
s5.1、在线获取位置x
k
的实时状态[x
k
,v
′
k
,t
′
k
]及实际能耗j
′
k
,并更新到状态[x
k
,v
k
,t
k
]和能耗j
k
中,从状态[x
k
,v
k
,t
k
]开始搜索;
[0067]
s5.2、由不同的控制输入u
k
搜索所有满足约束条件的状态并计算的值;
[0068]
s5.3、通过求解递推方程得到最优切换控制u
k*
和对应的最优模态w
k
(u
k*
),并将能耗、索引、状态,存储到对应的数组中;
[0069]
s5.4、令k:=k+1,重复所述步骤s5.2至s5.3直到达到终端状态;
[0070]
反向控制搜索:
[0071]
s5.5、从终端状态开始搜索;
[0072]
s5.6、查找控制与模态数组中当前状态对应的控制输入与模态并保存;
[0073]
s5.7、查找索引数组中当前状态对应的前一状态的索引[k,i,j];
[0074]
s5.8、令k:=k
‑
1,重复所述步骤s5.6至s5.7直到达到初始状态,更新最优切换控制序列及最优模态序列。
[0075]
s5.9、列车行驶进下一模态重复所述步骤s5.1至s5.8直到列车行驶到终点。
[0076]
与现有方法相比,本发明的有益效果如下:
[0077]
本发明公开的一种面向地铁列车自动驾驶的在线能量优化混杂反馈控制方法,考虑基本阻力、列车牵引特性等因素,以列车位置为自变量、速度和时间为状态变量建立列车动力学模型,建立基于模态切换的列车节能优化操纵模型,规定多站间的模态切换顺序规则,构造列车节能运行优化问题,根据线路条件将列车位置、速度和时间离散化构成状态空间,确定状态递推方程,用动态规划正向状态搜索与反向控制搜索得到列车最优切换控制序列及最优模态序列,该方法具有充分利用模态切换思想、在线控制列车等优点。
附图说明
[0078]
图1为本发明中所述的一种面向地铁列车自动驾驶的在线能量优化混杂反馈控制方法的流程图;
[0079]
图2为规定多站间的五种模态切换顺序规则示意图;
[0080]
图3为离散位置及其产生的速度状态集的示意图;
[0081]
图4为多站间离散动态规划算法搜索过程原理图;
具体实施方式
[0082]
为了清楚地说明本发明,下面结合附图对本发明作进一步的说明。显然,下面所具体描述的内容是说明性的而非限制性的,不应以此限制本发明的保护范围。
[0083]
如图1所示,本发明公开了一种面向地铁列车自动驾驶的在线能量优化混杂反馈控制方法,该优化方法包括如下步骤:
[0084]
s1、以列车位置为自变量、速度和时间为状态变量建立列车动力学模型:
[0085][0086]
其中,m为列车质量,x
k
,v
k
,t
k
分别为列车当前位置、速度和时间,w
k
(u
k
),r(v
k
)分别为模态,列车处于w
k
模态的牵引/制动力和基本阻力,表示为:
[0087][0088]
f
1(0)
(v
k
)=t(v
k
)
[0089]
f
2(0)
(v
k
)=r(v
k
)
[0090]
f
3(0)
(v
k
)=0
[0091]
f
4(0)
(v
k
)=
‑
b(v
k
)
[0092]
f
5(0)
(v
k
)=0
[0093]
r(v
k
)=r0+r1|v
k
|+r2v
k2
[0094]
其中,u
k
为切换控制,分别为列车牵引加速力和制动减速力,参数r0,r1,r2由列车型号和质量确定。
[0095]
亦庄线列车的质量m=300t,列车的牵引加速、制动减速特性曲线和基本阻力特性曲线表示为:
[0096][0097][0098]
r(v
k
)=0.006v2+3.948kn
[0099]
s2、规定多站间的五种模态切换顺序规则,具体如下:
[0100]
w
k
(1)=1
→
w
k
(0)=2
[0101]
w
k
(1)=2
→
w
k
(0)=3
[0102]
w
k
(1)=3
→
w
k
(0)=4
[0103]
w
k
(1)=4
→
w
k
(0)=5
[0104]
w
k
(1)=5
→
w
k
(0)=1
[0105]
具体u
k
切换控制与w
k
(u
k
)模态的关系如图2所示
[0106]
s3、车节能运行优化问题为求取列车运行牵引力对运行距离累加的最小值,表示为:
[0107][0108][0109]
其中,j为多站间总能耗,为非负函数。根据线路长度将列车位置离散化,列车行驶的最优速度如图3所示。
[0110]
s4、线路条件包括速度限制、列车总运行时间、列车停站时间,构成优化问题的约束条件:
[0111][0112]
其中,分别代表位置为模态5对应的速度与时间,v
max
为线路速度限制。t为规定的多站间总运行时间,t
s
为规定的列车停站时间,t
a
为允许的总运行时间偏差,v0,t0分别为列车起始位置的速度和时间,t
k
为列车终端位置的时间。
[0113]
切换控制u∈{0,1},u=0表示不切换模态,u=1为按照顺序切换至下一模态。
[0114]
根据线路条件将列车位置、速度和时间离散化。
[0115]
具体的,首先将站间距离按等间隔划分产生等间隔位置x0,x1,x2,x3,x4,x5,x6,x7,x8,x9,x
10
,x
11
,x
12
,...,x
k
,x
k+1
,x
k+2
,x
k+3
,...,x
k
‑4,x
k
‑3,x
k
‑2,x
k
‑1,x
k
;
[0116]
速度和时间分别等间隔离散化。速度和时间的离散间隔会影响最优节能策略的求解精度,理论上,δv,δt的取值越小越好。
[0117]
s5、确定状态递推方程,用离散动态规划算法在线搜索剩余的列车节能模态切换位置点。由动态规划最优性原理,该优化问题的状态递推方程为:
[0118][0119]
其中,k,i,j,p分别为位置、速度、时间、模态的索引,x
k
为第k个δx的位置,为x
k
位置的第i个速度值,位置的第i个速度值,为x
k
位置的第j个时间值,为列车状态,为列车状态,为列车在状态下的第p个模态,为列车从起始状态到状态的最小能耗,为列车从状态到状态的能耗,j
*
(x0,v0,t0)为列车在起始状态的能耗。
[0120]
离散动态规划算法包括动态规划正向状态搜索与反向控制搜索,其原理图如图4所示,由上述位置的离散化共得到k个阶段。从初始状态指向终端状态带箭头的线为正向搜索过程,表示切换控制作用下的状态转移过程,产生新的状态,实线的箭头指向有效状态
集。从终端状态指向初始状态带箭头的实线为反向搜索过程,根据动态规划最优性原理,确定最优控制序列及最优模态切换位置点序列。离散动态规划算法包括如下步骤:
[0121]
正向状态搜索:
[0122]
列车行驶在位置x
k
时:
[0123]
正向状态搜索:
[0124]
s5.1、在线获取位置x
k
的实时状态[x
k
,v
′
k
,t
′
k
]及实际能耗j
′
k
,并更新到状态[x
k
,v
k
,t
k
]和能耗j
k
中,从状态[x
k
,v
k
,t
k
]开始搜索;
[0125]
s5.2、由不同的控制输入u
k
搜索所有满足约束条件的状态并计算的值;
[0126]
s5.3、通过求解递推方程得到最优切换控制u
k*
和对应模态w
k
(u
k*
),并将能耗、索引、模态、状态,存储到对应的数组中;
[0127]
s5.4、令k:=k+1,重复所述步骤s5.2至s5.3直到达到终端状态;
[0128]
反向控制搜索:
[0129]
s5.5、从终端状态开始搜索;
[0130]
s5.6、查找控制数组中当前状态对应的控制输入并保存;
[0131]
s5.7、查找索引数组中当前状态对应的前一状态的索引[k,i,j];
[0132]
s5.8、令k:=k
‑
1,重复所述步骤s5.6至s5.7直到达到状态[x
k
,v
k
,t
k
],更新最优模态切换位置点序列。
[0133]
s5.9、列车行驶进下一模态重复所述步骤s5.1至s5.8直到列车行驶到终点。
[0134]
可见,本发明不仅可以减少列车多站间运行的牵引能耗,而且随着列车的行驶,实时获取真实的列车状态并更新列车的状态作为新的规划起点,并利用动态规划法搜索剩余的最优控制序列及最优模态切换位置点序列,真正做到对列车在线控制,降低列车运行误差。
[0135]
凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1