基于导航点和RVO模型的人群疏散仿真方法
基于导航点和rvo模型的人群疏散仿真方法
技术领域
1.本发明涉及人群疏散仿真技术领域,具体地说是基于导航点和rvo模型的人群疏散仿真方法。
背景技术:
2.随着现代社会的快速发展,人群高度集中的区域越来越多,例如大型商场、体育馆、博物馆、交通枢纽等。在这些区域发生突发事件时,如果没有科学合理的疏导指挥,很容易发生重大的人员伤亡和财物损失。人群疏散仿真是研究发生突发事件时人群疏散的行为,可以为制定科学合理的疏散方案提供决策支持,帮助设计者对建筑物或者公共场所的人流疏散通道进行综合分析与评价,以减少群体事件中拥挤、踩踏等不良事件的发生,使人群能够快速地疏散到安全区域。由于人群是个复杂的自组织系统,影响行人运动的因素繁多,实现高质量的人群仿真效果存在着诸多挑战,吸引了计算机科学、生物物理学、安全科学、心理学等众多领域研究者的关注。
3.目前比较成熟的人群疏散算法有相互速度障碍物(rvo)模型、社会力模型、网格模型a
‑
star算法等,其中rvo模型使用较多,如申请号为cn2018107778712、cn20191025113.7的专利申请都采用了rvo模型。相互速度障碍物(rvo)模型是一类重要的行人运动模型,在行人建模仿真领域得到广泛应用.然而该模型仅能应用于简单空间场景,当场景中存在多复杂障碍物时,例如凹多边形障碍物,该模型不能有效完成行人的疏散仿真;并且该模型也没有考虑在疏散过程中行人之间情绪的相互影响。
4.在现有rvo模型进行人群多障碍物场景疏散仿真过程中,当行人与目标点之间满足通视条件时,行人能有效疏散到目的地。但当行人与目的地间有障碍物,使行人与目标点之间不能通视时,障碍物的形状、位置分布会影响行人的疏散行为。
5.在多障碍物场景中,基于rvo模型进行人群疏散仿真过程中障碍物的形状、位置分布会影响行人的疏散行为,导致有可能出现下列问题:
6.(1)行人无法绕过非凸边形障碍物
7.当场景中有非凸边形障碍物时,rvo模型会使处在非凸边形区域内的行人无法绕出障碍物。
8.(2)行人疏散仿真路径不合理
9.rvo模型中行人的运动路径依赖于合力的驱动,在某些场景中,该模型不能产生合理的行人运动轨迹。
技术实现要素:
10.本发明之目的是弥补上述之不足,向社会公开能够应用于场景中存在复杂障碍物、路线规划合理的基于导航点和rvo模型的人群疏散仿真方法。
11.本发明的技术方案是这样实现的:
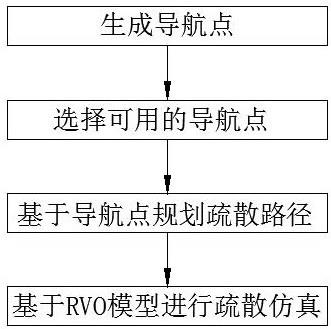
12.一种基于导航点和rvo模型的人群疏散仿真方法,包括以下步骤:
13.步骤一、生成导航点:在障碍物的每个顶点附近生成一个路径节点作为行人绕过障碍物的导航点,所述的导航点满足两个条件:第一、路径节点位于障碍物顶点之外,并与障碍物保持一定安全距离;第二、如果障碍物的两个顶点是连通的,则对应两个顶点生成的路径节点也是连通的;
14.步骤二、选择可用的导航点:对导航点设置危险系数n
r
和拥挤系数n
c
,对行人设置对导航点的危险性认知系数p
r
和拥挤性认知系数p
c
;可用导航点满足:危险系数n
r
≤危险性认知系数p
r
,拥挤系数n
c
≤拥挤性认知系数p
c
;
15.步骤三、基于导航点规划疏散路径:采用一个无向图对场景进行重构,把场景中行人的开始节点、所有可用导航点和所有出口节点作为无向图的顶点集合,判断该集合中任意两个顶点的连线与障碍物是否相交,如果不相交,表明顶点通视,构建一条边,如此反复构造出场景的连通无向图;在所构建的无向图中从行人开始节点到目的节点的任意条通行路径都是行人可能选择的疏散路径,从中计算得出疏散路径中的最短路径;
16.步骤四、基于rvo模型疏散行人:规划好行人的疏散路径后,采用rvo模型对行人进行疏散仿真。
17.进一步优化本技术方案的措施是:
18.作为改进,所述的步骤一中,障碍物顶点对应导航点的计算包括以下步骤:
19.步骤1:以该顶点坐标为圆心,nr长度为半径,生成一个圆w,并得出圆w的方程,其中,r为行人的半径,n为正整数;
20.步骤2:求该顶点与相邻两点构成角的角平分线l,得出角平分线l的方程;
21.步骤3:计算求得圆w和角平分线l的两个相交点的坐标;
22.步骤4:利用射线法分别计算两个交点与障碍物相交的数目,如果相交的数目为偶数或零,则表明该交点位于障碍物的外部,即为所求的导航点。
23.作为改进,所述的步骤三中,在构造的无向图中采用dijkstra算法求出从行人开始节点到每个出口节点的最短路径。
24.作为改进,所述的步骤四中,疏散仿真的具体步骤为:先将疏散路径的初始节点作为行人的出发地,将疏散路径中的中的第二个节点作为行人的临时目的地,利用rvo模型驱动行人运动到临时目的地,再将疏散路径中的下一个节点作为行人的临时目的地,如此往复直到行人抵达目的地,完成了行人的疏散仿真。
25.作为改进,所述的危险系数n
r
对任意导航点i定义为n_risk(i),其取值范围为[0,1]。
[0026]
作为改进,所述的n_risk(i)的计算方法:其中,d
pass
是导航点i到刺激源中心的距离,是导航点i到刺激源中心的最小安全距离。
[0027]
作为改进,所述的拥挤系数n
c
对任意导航点i定义为n_crowd(i),其取值范围为[0,1]。
[0028]
作为改进,所述的n_crowd(i)的计算方法:
其中,n表示距离导航点设定范围内的行人总数,表示行人i与导航点之间的距离。
[0029]
作为改进,所述的危险性认知系数p
r
对任意导航点i定义为p_risk(i),其取值范围为[0,1]。
[0030]
作为改进,所述的拥挤性认知系数p
c
对任意导航点i定义为p_crowd(i),其取值范围为[0,1]。
[0031]
本发明与现有技术相比的优点是:
[0032]
本发明的基于导航点和rvo模型的人群疏散仿真方法,利用障碍物的顶点作为导航点,并对导航点进行了条件限定,从危险性和拥挤性对导航点进行筛选,留下可用的导航点来构造一个无向连通图,以此规划出行人的疏散路径。利用障碍物的顶点作为导航点,解决了传统rvo人群疏散模型在复杂障碍物场景中的行人无法绕过非凸边形障碍物问题;通过对导航点危险性和拥挤性的判断,避免了所规划路径不合理的问题。
附图说明
[0033]
图1是本发明的流程图;
[0034]
图2是障碍物导航点生成示意图;
[0035]
图3是导航点生成原理图。
具体实施方式
[0036]
如图1所示,一种基于导航点和rvo模型的人群疏散仿真方法,包括以下步骤:
[0037]
步骤一、生成导航点:在障碍物的每个顶点附近生成一个路径节点作为行人绕过障碍物的导航点,所述的导航点满足两个条件:第一、路径节点位于障碍物顶点之外,并与障碍物保持一定安全距离(如设定安全距离为1米);第二、如果障碍物的两个顶点是连通的,则对应两个顶点生成的路径节点也是连通的。
[0038]
如图3所示,障碍物顶点对应导航点的计算包括以下步骤:
[0039]
步骤1:以该顶点坐标为圆心,nr长度为半径,生成一个圆w,并得出圆w的方程,其中,r为行人的半径,n为正整数;
[0040]
步骤2:求该顶点与相邻两点构成角的角平分线l,得出角平分线l的方程;
[0041]
步骤3:计算求得圆w和角平分线l的两个相交点的坐标;
[0042]
步骤4:利用射线法分别计算两个交点与障碍物相交的数目,如果相交的数目为偶数或零,则表明该交点位于障碍物的外部,即为所求的导航点。
[0043]
场景中的障碍物是由多条直线包围形成的封闭空间来表示,采用顶点坐标集合来表示一个障碍物。如图2(a)显示顶点abcdef表示一个障碍物,每个顶点对应的导航点如图2(b)所示,该导航点可以由该顶点和两个相邻的顶点坐标来生成。
[0044]
以图2中顶点a生成导航点为例,对应导航点生成算法如下:为求顶点a对应的导航点,需要输入a、b和f的坐标,通过顶点a、b和f的坐标,计算出顶点a附近的导航点。
[0045]
步骤1:以a的坐标(ax,ay)为圆心,nr长度为半径(r为行人的半径,n为正整数),生成一个圆w,圆w对应的方程为:(x
‑
a
x
)2+(y
‑
a
y
)2=(nr)2;
[0046]
步骤2:求直线ab和af的角平分线l:直线ab与x轴正方向的夹角
直线af与x轴正方向的夹角角平分线l与x轴正方向的夹角则角平分线l的方程为:(y
‑
a
y
)=θ3(x
‑
a
x
);
[0047]
步骤3:计算求得圆w和角平分线l的两个相交点a1,a2的坐标;
[0048]
步骤4:利用射线法分别计算交点a1和a2与障碍物相交的数目,如果相交的数目为偶数或零,则表明该交点位于障碍物abcdef的外部,即为所求的导航点。
[0049]
根据上述算法得到的导航点满足导航点需要满足的两个条件。
[0050]
步骤二、选择可用的导航点:对导航点设置危险系数n
r
和拥挤系数n
c
,对行人设置对导航点的危险性认知系数p
r
和拥挤性认知系数p
c
;可用导航点满足:危险系数n
r
≤危险性认知系数p
r
,拥挤系数n
c
≤拥挤性认知系数p
c
。
[0051]
危险系数n
r
:
[0052]
场景中导航点的危险性会随着环境的变化而改变,场景中的刺激源(如火源、恐怖分子)使周围的空间存在危险,提高周围导航点的危险性,当导航点与危险源的距离越近可通行性越低。对任意导航点i定义一个危险系数属性,用n_risk(i)表示,其取值范围为[0,1],n_risk(i)值越大表示危险性越高。
[0053]
所述的n_risk(i)的计算方法:其中,d
pass
是导航点i到刺激源中心的距离,是导航点i到刺激源中心的最小安全距离。
[0054]
拥挤系数n
c
:
[0055]
当场景中某个导航点周围的行人较多发生拥挤时,会导致该导航点的可通行性降低。为了描述路径节点的拥挤程度,对导航点i定义一个拥挤系数属性,用n_crowd(i)表示,其取值范围为[0,1],n_crowd(i)值越大表示拥挤性越高。
[0056]
所述的n_crowd(i)的计算方法:其中,n表示距离导航点设定范围内的行人总数,表示行人i与导航点之间的距离。假设导航点周围10米范围内的行人会对该导航点的拥挤系数产生影响,则n取距离导航点10米范围内的行人总数。
[0057]
另外,不同行人对危险性和和拥挤性的忍受程度不同;对行人设置对导航点的危险性认知系数p
r
和拥挤性认知系数p
c
,危险性认知系数p
r
对任意导航点i定义为p_risk(i),其取值范围为[0,1],表示行人疏散时能忍受的危险程度;拥挤性认知系数p
c
对任意导航点i定义为p_crowd(i),其取值范围为[0,1],表示行人疏散时能忍受的拥挤程度。在疏散模型中,事先对每个行人设置危险性认知系数p
r
和拥挤性认知系数p
c
,可用的导航点满足:p_risk(i)≥n_risk(i),p_crowd(i)≥n_crowd(i)。
[0058]
步骤三、基于导航点规划疏散路径:采用一个无向图对场景进行重构,把场景中行人的开始节点、所有可用导航点和所有出口节点作为无向图的顶点集合,判断该集合中任意两个顶点的连线与障碍物是否相交,如果不相交,表明顶点通视(即相连),构建一条边,
如此反复构造出场景的连通无向图;在所构建的无向图中从行人开始节点到目的节点的任意条通行路径都是行人可能选择的疏散路径,从中计算得出疏散路径中的最短路径。
[0059]
在一般情况下,行人会在众多疏散路径中选择最短路径,因此在构造的无向图中采用dijkstra算法求出从行人开始节点到每个出口节点的最短路径。dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。
[0060]
步骤四、基于rvo模型进行疏散仿真:规划好行人的疏散路径后,采用rvo模型对行人进行疏散仿真。疏散仿真的具体步骤为:先将疏散路径的初始节点作为行人的出发地,将疏散路径中的中的第二个节点作为行人的临时目的地,利用rvo模型驱动行人运动到临时目的地,再将疏散路径中的下一个节点作为行人的临时目的地,如此往复直到行人抵达目的地,完成了行人的疏散仿真。
[0061]
本发明的人群疏散仿真方法,在设置导航点时,对导航点进行限定,首先,路径节点位于障碍物顶点之外,并与障碍物保持一定安全距离,这保证了导航点与障碍物之间留有安全距离,其次,如果障碍物的两个顶点是连通的,则对应两个顶点生成的路径节点也是连通的。这样设定,能够避免rvo模型中行人无法绕过非凸边形障碍物的问题。另外,通过危险性和和拥挤性的定义,去除不合理的导航点,留下可用的导航点,增加了对导航点的限定以及加入行人的认知参数,更符合人群疏散时的实际情况;通过满足一定条件的导航点的设置来改善rvo模型,解决了现有rvo模型行人无法绕过非凸边形障碍物和规划路线不合理的问题。
[0062]
本发明的最佳实施例已被阐明,由本领域普通技术人员做出的各种变化或改型都不会脱离本发明的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1