基于地基云图的畸变校正方法
1.本发明涉及数字图像处理领域,尤其是涉及一种基于地基云图的畸变校正方法。
背景技术:
2.天气图像是气象相关领域的重要数据之一,能够表征局部的大气状态,成为气象分析和气象监测等领域的重点研究目标。天气图像的采集由地基设备完成,采集的天气图像称为地基云图。地基设备实时监测局部天空,高时空分辨率地呈现云分布、光照分布等信息。分布式光伏电站功率预测模型研究中,云团的运动和分布是导致光伏功率变化的重要因素之一。为实现准确的云团运动预测以及光伏功率预测,需要开展地基云图的畸变校正,对地基设备采集到的地基云图进行校正,最终呈现出真实的天空状态。
3.本发明采用的地基设备是全天空成像仪(total sky imagery,tsi),tsi的成像系统由支撑臂悬挂在映射天空的半球镜的上方,因此地基云图中不仅存在简单的鱼眼镜头的畸变,还存在半球镜和穹顶状云层带来的复杂光学路径导致的畸变。现有的畸变校正方法有两种。第一种方法首先依据径向畸变的经验性分析调整像素位置,解决沿着径向方向的几何失真。进一步地,执行立体角修正以纠正图像中像素对应不同立体角的问题。由图像计算到的特征能够被这种方法校正,但是畸变校正处理的图像无法直接产生。另一种方法是基于几何变换使地基云图转换到天空坐标,首先拟合径向畸变中的天顶角
‑
径向距离曲线,然后执行地基云图从球坐标到直角坐标网的转换。这种方法是当前的主流方法,效率高且准确度较好,然而模型的精度限制了该方法准确度的进一步提高,因此,急需提出一种基于更高精度模型的畸变校正方法。
技术实现要素:
4.为了克服现有技术的不足,本发明旨在提出一种基于地基云图的畸变校正方法,首先,确定图像中像素到天顶的图像径向距离;然后,依据拟合得到的图像径向距离—天顶角公式,确定图像中像素的天顶角;继而,基于转换模型确定空间中像素到天顶的天空径向距离;确定天空图像径向距离和像素在天空图像中的坐标并完成映射;最后,对信息不完整的天空图像进行插值得到完整的畸变校正图像。
5.具体步骤如下:
6.步骤1确定图像径向距离和图像极角:
7.像素在图像中的位置由像素坐标系表示,坐标系原点位于图像左上角,横轴为列u,纵轴为行v,像素坐标指的是像素在图像中的行和列,单位为像素,为实现原始图像向畸变校正后天空图像的映射,采用径向映射方法,需要确定像素在图像中的极坐标——图像径向距离和图像极角,详细步骤如下:
8.1)、极坐标系的极点设为天顶,位于图像中天空区域的中心,像素坐标(u
o
,v
o
),像素极坐标的极径,即图像中像素到天顶的径向距离,由如下公式计算:
9.10.其中,(u
i
,v
i
)为图像像素的像素坐标。图像径向距离表征了像素在原始图像中与天顶位置的远近;
11.2)、像素极坐标的极角φ,即图像中像素偏离正方向的角度,以表征地理位置中南方的垂直向下为起始方向,取顺时针方向为正方向,由如下公式计算:
[0012][0013]
极角的计算符合空间中天体坐标的理论描述,便于理解和后续映射;
[0014]
步骤2确定图像中像素的天顶角:
[0015]
空间中物体的位置由天体坐标系表示,为构建图像中像素坐标与空间中天体坐标的映射关系,建立图像像素坐标的图像径向距离与空间天体坐标的天顶角之间的关系,并由此确定图像中像素的天顶角,具体步骤如下:
[0016]
1)、太阳是图像中位于天空区域的实体之一,而且实时运动的太阳具有变化的空间位置,因此以太阳为对象可构建图像的像素坐标系与空间的天体坐标系的映射关系。
[0017]
对于某一特定时刻,太阳在图像的像素坐标系的坐标可从原始地基云图中检测得到,太阳位于地基云图的遮蔽带上,当不存在云遮挡太阳的情况时,太阳位置显示出高的亮度且呈现为太阳圆盘,提取太阳圆盘的中心坐标为太阳的像素坐标;
[0018]
水平坐标系用观测者的局部地平线作为基面,地平线上方的可视物体由水平坐标——天顶角α和方位角β表示,单位为度,天顶角是以观测者为基准的天顶和物体间的角度,方位角是物体以南方为起始方向顺时针的相对角度,太阳的天顶角由天文公式计算得到:
[0019][0020]
其中,δ为根据日期计算得到的太阳赤纬角,为地理纬度,τ为由日期、时间和经度计算得到的太阳时角:
[0021]
2)、图像像素坐标的图像径向距离与空间天体坐标的天顶角具有相同的含义,均表示了像素与天顶的距离,因此随机选取不同日期时间且太阳未被遮挡的地基云图,计算太阳的图像径向距离和天顶角,横轴为图像径向距离,纵轴为天顶角,太阳的图像径向距离和天顶角数据呈曲线分布,因此拟合为三次多项式,得到图像径向距离—天顶角公式;
[0022]
3)、图像径向距离—天顶角公式确定后,将步骤1计算得到的图像径向距离代入公式,最终完成图像中像素的天顶角的计算;
[0023]
步骤3确定天空径向距离:
[0024]
为了校正得到天空中像素到天顶的径向距离,即天空径向距离,以地心角作为间接变量,构建固定方位角下天顶角与对应云层弧形长度之间的关系,即天顶角与天空径向距离的转换模型,实现天空径向距离的计算;
[0025]
步骤4确定天空图像径向距离,实现坐标转化并完成映射:
[0026]
将数值较大的天空径向距离转化为天空图像径向距离,进一步将天空图像的极坐标转化为像素坐标,完成像素由图像到畸变校正后天空图像的映射;
[0027]
步骤5对天空图像进行插值:
[0028]
采用径向插值方法:
[0029]
寻找在径向方向邻近待插值像素a的含有像素信息的像素b和c,如果径向方向邻
近像素存在两个,则将两个像素的均值赋予a;如果径向方向邻近像素存在一个,则将该像素值赋予a。遍历处理天空图像中全部的待插值像素,得到最终的畸变校正结果。
[0030]
步骤3具体步骤如下:
[0031]
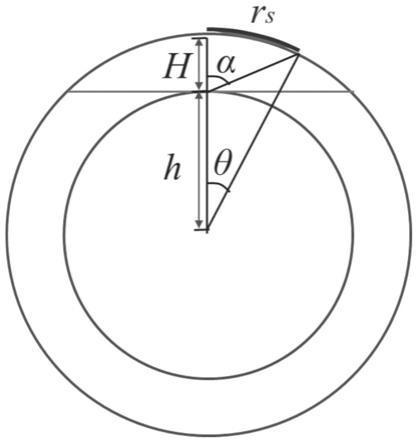
1)、地基设备由地球表面观测点观测顶部天空,h为云高,h为地球半径,θ为地心角。在此假设地球是标准球体且云层高度固定,这些假设导致的差异对于当前的畸变校正研究目标可以忽略,根据几何模型,推导得到天顶角与地心角的转换公式如下:
[0032][0033]
由此,代入基于地球表面观测点的天顶角,计算得到基于地球中心的地心角。
[0034]
2)、根据几何模型,推导得到地心角与天空径向距离的转换公式如下:
[0035]
r
s
=θ
×
(h+h)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0036]
其中,r
s
为像素的天空径向距离。基于像素的天顶角与天空径向距离的几何模型,推导出的两个转换公式为天顶角与天空径向距离的转换模型,实现天空径向距离的计算。
[0037]
步骤4详细步骤如下:
[0038]
1)、设定天空图像中天空区域的半径为r,天空图像径向距离由如下公式计算:
[0039][0040]
其中,r
smax
为r
s
的最大值。由此获得像素在天空图像中的极径,且像素在天空图像中的极角和像素在图像中的极角相等,因此像素在天空图像中的极坐标得以唯一确定;
[0041]
2)、畸变校正过程中像素的映射需要确定像素在天空图像的像素坐标,表示为:
[0042]
u
si
=u
sio
‑
r
si
×
sinφ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0043]
v
si
=v
sio
‑
r
si
×
cosφ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0044]
其中,u
sio
和v
sio
为天空图像中的极点的像素坐标的行和列,极点设为天空图像的中心。明确了像素的图像坐标和天空图像坐标后,可将图像中像素的信息赋予天空图像中相应坐标的像素,完成像素的映射。
[0045]
本发明的特点及有益效果是:
[0046]
本发明对地基云图进行了畸变校正,精度高,算法简便,而且具有很好的普适性,适用于多种地基设备。本发明的待插值的天空图像与通常的待插值图像不同,距离天顶位置即图像中心越远,含有信息的像素的数量越少,提出的径向插值方法适用于地基设备采集的图像,与传统插值算法相比插值效果更好。
附图说明:
[0047]
图1像素坐标系。
[0048]
图2太阳的像素坐标。
[0049]
图3水平坐标系。
[0050]
图4太阳的图像径向距离和天顶角拟合曲线。
[0051]
图5天顶角与天空径向距离的几何模型。
[0052]
图6映射后的天空图像。
[0053]
图7径向插值。
[0054]
图8畸变校正结果。
具体实施方式
[0055]
下面结合具体实施方式对本发明做进一步阐述。
[0056]
与其它畸变校正方法相比,本发明提出了一种更为精确的方法来校正图像中的畸变。首先,确定图像中像素到天顶的图像径向距离;然后,依据拟合得到的图像径向距离—天顶角公式,确定图像中像素的天顶角;继而,基于转换模型确定空间中像素到天顶的天空径向距离;确定天空图像径向距离和像素在天空图像中的坐标并完成映射;最后,对信息不完整的天空图像进行插值得到完整的畸变校正图像。
[0057]
基于地基云图的畸变校正主要包括以下步骤:
[0058]
步骤1确定图像径向距离和图像极角:
[0059]
像素在图像中的位置由像素坐标系表示,如图1所示,坐标系原点位于图像左上角,横轴为列u,纵轴为行v。像素坐标指的是像素在图像中的行和列,单位为像素。为实现原始图像向畸变校正后天空图像的映射,采用径向映射方法,需要确定像素在图像中的极坐标——图像径向距离和图像极角,具体步骤如下:
[0060]
1、极坐标系的极点设为天顶,位于图像中天空区域的中心,如图1中像素坐标(u
o
,v
o
)所指示的位置。像素极坐标的极径,即图像中像素到天顶的径向距离(图像径向距离),由如下公式计算:
[0061][0062]
其中,(u
i
,v
i
)为图像像素的像素坐标。图像径向距离表征了像素在原始图像中与天顶位置的远近。
[0063]
2、像素极坐标的极角,即图像中像素偏离正方向的角度(图像极角),以表征地理位置中南方的垂直向下为起始方向,取顺时针方向为正方向,由如下公式计算:
[0064][0065]
极角的计算符合空间中天体坐标的理论描述,便于理解和后续映射。
[0066]
步骤2确定图像中像素的天顶角:
[0067]
空间中物体的位置由天体坐标系表示,为构建图像中像素坐标与空间中天体坐标的映射关系,建立图像像素坐标的图像径向距离与空间天体坐标的天顶角之间的关系,并由此确定图像中像素的天顶角。具体步骤如下:
[0068]
1、太阳是图像中位于天空区域的实体之一,而且实时运动的太阳具有变化的空间位置,因此以太阳为对象可构建图像的像素坐标系与空间的天体坐标系的映射关系。
[0069]
对于某一特定时刻,太阳在图像的像素坐标系的坐标可从原始地基云图中检测得到。如图2所示,太阳位于地基云图的遮蔽带上,当不存在云遮挡太阳的情况时,太阳位置显示出高的亮度且呈现为太阳圆盘,提取太阳圆盘的中心坐标为太阳的像素坐标。
[0070]
如图3所示,水平坐标系用观测者的局部地平线作为基面,地平线上方的可视物体由水平坐标——天顶角α和方位角β表示,单位为度。天顶角是以观测者为基准的天顶和物体间的角度,方位角是物体以南方为起始方向顺时针的相对角度。太阳的天顶角由天文公式计算得到:
[0071][0072]
其中,δ为根据日期计算得到的太阳赤纬角,为地理纬度,τ为由日期、时间和经度计算得到的太阳时角。
[0073]
2、图像像素坐标的图像径向距离与空间天体坐标的天顶角具有相同的含义,均表示了像素与天顶的距离。因此随机选取不同日期时间且太阳未被遮挡的地基云图,计算太阳的图像径向距离和天顶角。如图4所示,横轴为图像径向距离,纵轴为天顶角,太阳的图像径向距离和天顶角数据呈曲线分布,因此拟合为三次多项式,得到图像径向距离—天顶角公式。
[0074]
3、图像径向距离—天顶角公式确定后,将步骤1计算得到的图像径向距离代入公式,最终完成图像中像素的天顶角的计算。
[0075]
步骤3确定天空径向距离:
[0076]
为了校正得到天空中像素到天顶的径向距离,即天空径向距离,以地心角作为间接变量,构建固定方位角下天顶角与对应云层弧形长度之间的关系,即天顶角与天空径向距离的转换模型,实现天空径向距离的计算。具体步骤如下:
[0077]
1、地基设备由地球表面观测点观测顶部天空,图5显示了天顶角与天空径向距离的几何模型。蓝色圆环为云层,棕色圆环为地球表面,红色圆弧为天空径向距离,h为云高,h为地球半径,θ为地心角。在此假设地球是标准球体且云层高度固定,这些假设导致的差异对于当前的畸变校正研究目标可以忽略。根据几何模型,推导得到天顶角与地心角的转换公式如下:
[0078][0079]
由此,代入基于地球表面观测点的天顶角,计算得到基于地球中心的地心角。
[0080]
2、根据几何模型,推导得到地心角与天空径向距离的转换公式如下:
[0081]
r
s
=θ
×
(h+h)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0082]
其中,r
s
为像素的天空径向距离。基于像素的天顶角与天空径向距离的几何模型,推导出的两个转换公式为天顶角与天空径向距离的转换模型,实现了天空径向距离的计算。
[0083]
步骤4确定天空图像径向距离,实现坐标转化并完成映射:
[0084]
天空径向距离为天空的实际跨度,为实现在有限大小的图像中显现天空,需将数值较大的天空径向距离转化为天空图像径向距离,进一步将天空图像的极坐标转化为像素坐标,完成像素由图像到畸变校正后天空图像的映射。具体步骤如下:
[0085]
1、设定天空图像中天空区域的半径为r,天空图像径向距离由如下公式计算:
[0086][0087]
其中,r
smax
为r
s
的最大值。由此获得像素在天空图像中的极径,且像素在天空图像中的极角和像素在图像中的极角相等,因此像素在天空图像中的极坐标得以唯一确定。
[0088]
2、畸变校正过程中像素的映射需要确定像素在天空图像的像素坐标,表示为:
[0089]
u
si
=u
sio
‑
r
si
×
sinφ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0090]
v
si
=v
sio
‑
r
si
×
cosφ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0091]
其中,u
sio
和v
sio
为天空图像中的极点的像素坐标的行和列,极点设为天空图像的中心。明确了像素的图像坐标和天空图像坐标后,可将图像中像素的信息赋予天空图像中相应坐标的像素,完成像素的映射,图6为的映射后的天空图像。
[0092]
步骤5对天空图像进行插值:
[0093]
前向映射方式使得天空图像中部分像素未映射到像素信息,因此插值算法被应用以获得完整的畸变校正结果。传统的插值方法中,适用于二维图像的经典插值方法有最近邻插值、双线性插值和双三次插值。最临近插值算法是最基本、最简单的,但效果较差,原因是引入了严重的图像失真,使得图像出现块状效应。双三次插值计算精度高,但大的计算量极大地降低了图像处理速度。双线性插值比最邻近插值计算量大但没有灰度不连续的缺点,与双三次插值比它使高频分量受损,图像轮廓有一点模糊但结果仍然令人满意。本发明的待插值的天空图像与通常的待插值图像不同,距离天顶位置即图像中心越远,含有信息的像素的数量越少。双线性插值不能很好的处理本发明的待插值的天空图像,同时考虑畸变校正过程中像素是在固定方位角下按照天顶角径向映射的特有的映射方式,本发明提出了径向插值方法。
[0094]
图像中径向距离较大的径向连通的像素映射到天空图像后存在像素间的空隙,因此不同于通常的待插值图像,本发明的待插值天空图像中径向分布的像素具有相关性,因此采用径向插值方法重建图像。如图7所示,黄色像素的位置代表太阳的方位,红色箭头为待插值像素a的径向方向,寻找在径向方向邻近待插值像素a的含有像素信息的像素b和c,如果径向方向邻近像素存在两个,则将两个像素的均值赋予a;如果径向方向邻近像素存在一个,则将该像素值赋予a。遍历处理天空图像中全部的待插值像素,得到最终的畸变校正结果(见图8)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1