一种水下鱼群运动模式分析方法
1.本发明涉及动物群体行为分析,特别是一种水下鱼群运动模式分析方法。
背景技术:
2.在自然界中,动物集结成群进行迁徙或者觅食的行为非常普遍。同时动物群在运动的过程中具有聚集性强、运动方向一致、速度一致等明显特征。自然界中的单体动物的行为相对来说比较简单,但聚集为群体后就会表现出复杂的群体行为。因此,针对动物群体行为的研究要远比对动物单体的研究意义重大。
3.在海洋中,鱼类出于生存、觅食、繁衍等原因,往往采取群体行为聚集为鱼群进行群体活动。鱼类行为对于水体盐度变化、温度变化、溶氧量变化与光照等外部环境非常敏感。通过对鱼群运动模式的分析,不仅可以加深对鱼群体行为的研究,同时也可以及时发现当前鱼类生存环境中的异常。因此对鱼群运动模式进行分析,对研究鱼类行为的机理、提升人工养殖信息化水平具有很大的意义。
4.利用计算机视觉对鱼群的行为进行研究,需要精确的检测出运动目标的位置并进行跟踪。现有研究方案包括量化鱼群行为的计算机图像处理系统、基于计算机视觉的鱼群监控系统以及基于运动目标检测的鱼群追中算法等。然而,由于目前对群体运动目标的跟踪比较困难,尤其是在群体中个体较多、密度较大、运动行为比较复杂的情况下,会大大增加目标追踪的复杂性。因此现有的方案中,普遍存在着鱼群追踪精度较低、计算成本偏高的问题。
技术实现要素:
5.为解决现有技术存在的上述问题,本发明要提出一种准确率高、计算成本低的水下鱼群运动模式分析方法。
6.为了实现上述目的,本发明的技术方案如下:一种水下鱼群运动模式分析方法,包括以下步骤:
7.a、构建光流场
8.a1、以固定机位对鱼群场景拍摄一段视频,并用相等时间间隔截取视频,将视频分解为连续帧图像。
9.a2、计算连续帧图像队列中每连续两张图像间的光流,构建视频光流场,记做m,m存储为一个m
×
n
×
t的三维矩阵,m、n和t分别表示图像的横向像素尺寸、纵向像素尺寸和队列长度。令m的每一元素为表示第t时刻的图像中第i行第j列像素粒子经光流计算位移至第t+1时刻图像中像素粒子所产生的横向位移和纵向位移
10.b、确定特征区域
11.b1、按下式计算光流场热力图:
12.h=∑
t
m
(t)
13.通过对每一帧图像中的粒子光流的线性累加,热力图h中每一元素表示该像素位置在视频中的活跃程度,热力值越偏离零点的数值越大代表该位置的活跃程度越高。
14.b2、将初始图像的所有像素粒子设为路径源点,通过逐点的光流场时间积分,实现群体路径追踪,如下式:
15.p=∫
t
m
(t)
16.其每一元素的计算如下:
[0017][0018]
由此,表示的路径源点o
ij
(i,j)在视频中的运动路径坐标序列。b3、定义降噪阈值δ,将满足下式:
[0019]
的粒子路径更改为:
[0020]
p
ij
=0
[0021]
其中表示粒子o
ij
(i,j)在t到t+1帧的位移量。
[0022]
将位移量小于δ的路径视为噪声路径并剔除,减少视频场景中的无效路径,实现群体路径的有效刻画。
[0023]
b4、固定一个s
×
s的网格区域γ遍历图像所有像素位置,其中s<min(m,n),若满足:
[0024][0025]
即:既在光流热力场中具有较高粒子活跃度|h
γ
|,同时又有较多的像素粒子路径终点落在该区域内则将该网格区域γ定义为特征区域。
[0026]
c、计算特征图
[0027]
c1、计算平均光流场
[0028]
将每一像素位置处的所有光流平均,计算整个视频的平均光流场:
[0029]
f=h/t
[0030]
c2、构建模态特征矩阵
[0031]
对于平均光流场中的像素粒子o
xy
(x,y),x和y分别为像素粒子横向坐标和纵向坐
标,假设其上、下、左、右像素粒子的平均光流值分别为:
[0032]
f(x,y+1)={a,b}
[0033]
f(x,y
‑
1)={c,d}
[0034]
f(x
‑
1,y)={e,f}
[0035]
f(x+1,y)={g,h}
[0036]
则该粒子的模态特征矩阵c被定义为:
[0037][0038]
c3、构建特征值方程
[0039]
由粒子的模态特征矩阵c,定义特征矩阵的特征值方程:
[0040]
λ2+αλ+β=0
[0041]
其中:
[0042]
α=e+d
‑
g
‑
b
[0043]
β=(e
‑
g)
×
(d
‑
b)
‑
(c
‑
a)
×
(f
‑
h)
[0044]
并记:
[0045]
δ=α2‑
4β
[0046]
d、分析粒子运动模态
[0047]
在视频的粒子运动光流场中,由α,β,δ所满足的条件表示目标粒子o
xy
(x,y)的特征值值域分布,根据特征值状态将o
xy
(x,y)的运动模态分为以下五种运动模态:聚合态、扩散态、
◎
环绕态、≡并行态和
※
混乱态,五种运动模态的定义如下:
[0048]
d1、聚合态
[0049]
α<0,β>∈,δ>0
[0050]
特征值均为负,周围粒子相对目标粒子呈聚合模态,向目标运动方向聚集,其中∈为容错阈值。
[0051]
d2、扩散态
[0052]
α>0,β>∈,δ>0
[0053]
特征值均为正,周围粒子相对目标粒子呈扩散状态,远离目标运动。
[0054]
d3、
◎
环绕态
[0055]
β<
‑
∈
[0056]
特征值异号,周围粒子围绕目标粒子呈环绕状态,环绕目标运动。
[0057]
d4、≡并行态
[0058]
|β|<∈
[0059]
特征值有零解,周围粒子相对目标粒子呈并行状态,与目标粒子保持相对静止。
[0060]
d5、
※
混乱态
[0061]
δ<0
[0062]
特征值非实数,周围粒子相对目标粒子呈混乱状态,无规则运动,既有粒子贴近目标运动,又有粒子远离目标运动。
[0063]
e、分析鱼群场景运动模式
[0064]
e1、以高粒子活跃度所涵盖的终点落在步骤b所确立的特征区域γ中的粒子路径区域作为鱼群活动区π。
[0065]
e2、通过步骤d中粒子运动模态分析方法,计算γ内所有粒子的运动模态。
[0066]
e3、统计γ内的粒子运动模态,以最多数量的运动模态作为该鱼群活动区π的运动模式。
[0067]
与现有技术相比,本发明具有以下有益效果:
[0068]
1、本发明采用光流逼近鱼群运动策略。原始鱼群运动视频经过步骤a、b光流特征提取,像素粒子有效刻画场景运动场。无论视频的清晰度和鱼群的个体运动姿态,本发明都能够有效捕捉鱼群整体的运动模式,具有较高的精确度。
[0069]
2、本发明建立鱼群视频光流场分析模型,采用步骤c、d构建目标像素粒子的运动特征,以与邻域粒子的相对光流运动分析该粒子的运动模态,经过统计特征区域内单粒子的运动模态导出群体运动模式,可分为五种运动模式:聚合模式、扩散模式、环绕模式、并行模式、混乱模式,有效展现鱼群的活动状态。
[0070]
3、本发明提出便于鱼群视频场景运动模式分析方法,利用特征区域γ内的粒子运动模态分析鱼群活动区π内鱼群运动模式,比当前需要依靠场景分割、目标识别、目标跟踪等技术的群体行为分析方法更加快速、简便,计算成本较现有方案更低,从而提高经济效益。
附图说明
[0071]
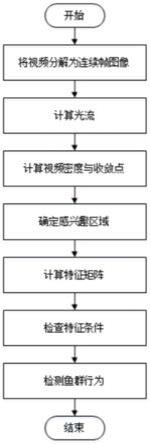
图1是本发明的流程图。
[0072]
图2是鱼群视频的某一帧图像。
[0073]
图3是鱼群活动区域图。
[0074]
图4是鱼群活动特征图。
具体实施方式
[0075]
下面结合附图对本发明进行进一步描述。按照图1所示流程对鱼群运动视频进行计算。首先获取鱼群运动的视频,并截取视频的连续两帧的图像,如图2所示,并将这两张图像作为本发明鱼群运动模式分析的原始图像。按照本发明的步骤a,对原始的图像构建光流场,并提取光流。然后按照本发明的b、c两个步骤计算热力图,并最终计算出鱼群活动区域,如图3所示。最后按照本发明的d、e两个步骤确定鱼群的运动模式,生成鱼群活动特征图,如图4所示。按照本发明的方法,最终可以确定鱼群的运动行为分别为扩散模式、环绕模式与并行模式。
[0076]
本发明不局限于本实施例,任何在本发明披露的技术范围内的等同构思或者改变,均列为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1