一种智能无人物流运输方法和系统与流程
1.本发明属于物流运输技术领域,具体涉及一种智能无人运输和物流系统和方法。
背景技术:
2.智能交通系统(intelligent traffic system,简称its)又称智能运输系统(intelligent transportation system),是将先进的信息技术、计算机技术、数据通信技术、传感器技术、电子控制技术、自动控制理论、运筹学、人工智能等技术理论有效地综合运用于交通运输、服务控制和车辆制造,加强车辆、道路、使用者三者之间的联系,从而形成一种提高效率、节约能源、保障安全、改善环境的综合运输系统。它主要是由交通信息采集系统、信息处理分析系统和信息发布系统三部分构成。
3.智能交通系统的构建离不开交通基础设施的智能化,依托全新的技术手段,对传统的公路基础设施进行改进,全线实现互通、互联、信息共享。智能交通系统与传统交通方式相比,可以最大限度地发挥道路基础设施的作用,所以只有不断地将最先进的信息技术、通讯技术和处理能力整合运用到相应的公路基础设施中,才能不断促进交通管理体系的发展,促进交通运输的效率,改善交通安全问题。
4.现有技术中,如中国专利201210195715.8公开了一种城市智能交通运输系统及其运行方法,其系统包括全立交全封闭轻型高架路通道,无人驾驶电动智能无人小车、节点车站、智能调度系统、物流服务系统等,选择所要达到的目的地后可以将乘客或者所要运送的物品在专门的高架路通道上运送到目的地;中国专利202010560392.2公开了一种自动驾驶车辆的导航方法,其通通过导航数据输出一个三维或二维参考坐标系,利用slam+rtk gps+dr融合的导航方法,可以将自动驾驶车辆的位置进行误差的校正并精确定位,融合完毕后输出自动驾驶车辆可以理解的坐标系数据,可以使自动驾驶车辆在50hz的频率下精度可达+
‑
2~5cm,在20hz的频率下精度可达+
‑
1cm,大大的提高了自动驾驶车辆位置的精度,也使导航的精度大大提高。
5.虽然上述的202010560392.2无人物流运输系统,能够精确地导航无人运送装置到达目的地,但是如果多个物品同时发货,在高架路通道上运输,可能会造成拥堵,并不能使中国专利201210195715.8公开的这种物流运输系统能够减少运输的时间成本,因此,急需一种能够使运送物品的形成损失时间最小的一种智能无人运输和物流系统和方法。
技术实现要素:
6.本发明针对上述缺陷,提供一种能够监测高架路通道系统和运行状况,统筹规划多个小车的行走路线和高架路通道的交通管控措施的方法,进而能够使运送物品的形成损失时间最小的一种智能无人运输和物流系统和方法。
7.本发明提供如下技术方案:一种智能无人物流运输方法,包括以下步骤:
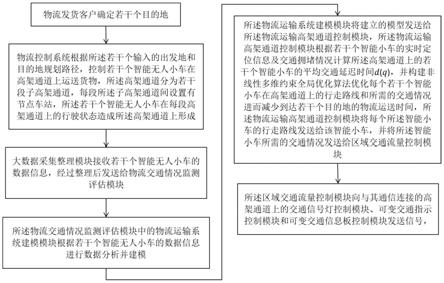
8.s1:物流发货客户确定若干个目的地;
9.s2:物流控制系统根据所述若干个输入的出发地和目的地规划路径,控制若干个
智能无人小车在高架通道上运送货物,所述高架通道分为若干段子高架通道,每段所述子高架通道间设置有节点车站,所述若干个智能无人小车在每段高架通道上的行驶状态造成所述高架通道上形成自由交通条件或拥挤交通条件;
10.s3:大数据采集整理模块接收若干个智能无人小车的数据信息,经过整理后发送给物流交通情况监测评估模块;
11.s4:所述物流交通情况监测评估模块中的物流运输系统建模模块根据若干个智能无人小车的数据信息进行数据分析并建模;
12.s5:所述物流运输系统建模模块将建立的模型发送给所述物流运输高架通道控制模块,所述物流运输高架通道控制模块根据若干个智能无人小车的实时定位信息及交通拥堵情况计算所述高架通道上的若干个智能无人小车的平均交通延迟时间d(q),并构建非线性多维约束全局优化算法优化每个若干个智能无人小车在高架通道上的行走路线和所需的交通情况进而减少到达若干个目的地的物流运送时间,所述物流运输高架通道控制模块将每个所述智能无人小车的行走路线发送给该智能无人小车,并将所述智能无人小车所需的交通情况发送给区域交通流量控制模块;
13.s6:所述区域交通流量控制模块向与其通信连接的高架通道上的交通信号灯控制模块、可变交通指示控制模块和可变交通信息板控制模块发送信号,交通信号灯、可变交通指示和可变交通信息板根据所述所需交通情况进行变化。
14.进一步地,所述物流运输系统建模模块构建基于拥挤交通流附加时间损失估算总行程时间t的模型:
[0015][0016]
其中,所述t为若干个智能无人小车送货达到目的的总行程时间,单位为辆
·
h;所述l为所述高架通道的分段长度,单位为km;所述v(q为若干个智能无人小车的平均行驶速度,单位为km/h;所述q为不拥挤的交通容量,单位为辆/h;所述δ是间隔时间,单位为h;所述v
crit
是通行能力下的临界速度,单位为km/h;所述t
loss
是与拥堵相关的行程时间损失,单位为辆
·
h。
[0017]
进一步地,所述若干个智能无人小车的平均行驶速度v(q)的计算公式如下:
[0018][0019]
其中,所述v(q)为平均行驶速度,所述v0、l0、c0为模型参数。
[0020]
进一步地,所述拥堵相关的行程时间损失t
loss
的计算公式如下:
[0021][0022]
其中,所述c为高架通道最大智能无人小车容量,单位为辆/h;所述a和所述b为拥堵相关的行程时间损失计算参数。
[0023]
进一步地,所述s5步骤中所述物流运输高架通道控制模块(2
‑
2)根据若干个智能
无人小车的实时定位信息及交通拥堵情况计算所述高架通道上的若干个智能无人小车的平均交通延迟时间d(q)的计算公式如下:
[0024][0025]
其中,所述d(q)为平均延迟时间,单位为s;所述c为若干个智能无人小车送货的相位周期时间,单位为s;所述g为循环时间内的绿灯时间,单位为s;所述q为不拥挤的交通容量,单位为辆/h;所述c为高架通道最大智能无人小车容量,单位为辆/h;所述t为所述d(q的计算持续时间,单位为h;所述k为取决于所述物流运输高架通道控制模块设置的增量延迟因子,所述i为上游过滤和计量调整系数。
[0026]
进一步地,所述s5步骤中所述物流运输高架通道控制模块构建的非线性多维约束全局优化算法模型如下:
[0027][0028]
其中,所述m为所述高架通道的总段数,所述t
j
(x)是第j段子高架通道内的若干个智能无人小车的总行程时间,单位为辆
·
h;所述d
j
(x)为所述第j段子高架通道内若干个智能无人小车的向所述目的地行进的平均延误时间,单位为车辆
·
h;所述x是第j段高架通道内所述若干个智能无人小车的最佳循环时间向量,单位为s;所述x
min
、x
max
分别是第j段子高架通道内所述若干个智能无人小车循环时间的最小和最大限制端点值;所述g(x)为不等式约束函数和所述h(x)为等式约束函数。
[0029]
进一步地,所述大数据采集整理模块接收所述若干个智能无人小车的gps地理信息数据,包括环境温度、环境湿度、风速和风向的气象信息数据,智能无人小车数量信息数据。
[0030]
本发明还提供采用上述方法的智能无人物流运输系统,所述系统包括若干个智能无人小车、大数据采集整理模块、物流交通情况监测评估模块、区域交通流量控制模块、交通协调控制模块,所述智能无人小车安装有gps定位模块、移动网络模块、环境温度模块、环境湿度模块、风速模块和风向模块。
[0031]
进一步地,所述交通协调控制模块包括交通信号灯控制模块、可变交通指示控制模块和可变交通信息板控制模块。
[0032]
进一步地,所述物流交通情况监测评估模块包括物流运输系统建模模块和物流运输高架通道控制模块。
[0033]
本发明的有益效果为:
[0034]
1、本发明提供的智能无人运输和物流系统和方法,通过将高架路通道分成多段,将运送货物的智能无人小车配置具有定位功能的gps定位模块,能够通信的移动网络模块
和监测气象环境的环境温度模块、环境湿度模块、风速模块和风向模块而具有先进的智能功能,能够为物流运输系统提供每个运送货物的智能无人小车的位置以及其所在的环境气象情况,进而通过大数据采集整理模块预处理以后,进行运送延迟时间的计算、交通拥挤情况进而规划最佳的运行路线减少运送的时间成本。
[0035]
2、本发明提供的智能无人运输和物流系统和方法中的物流运输系统建模模块通过根据大数据采集整理模块预处理后的若干个智能无人小车的地理信息数据、数量信息数据和气象信息,能够构建在多段的高架通道上运行的智能无人小车的基于拥挤交通流附加时间损失估算总行程时间t的模型,该模型中包括了在一段高架通道上运行的智能无人小车处于不拥堵的自由交通条件下的行程时间,以及在拥堵交通条件下的行程时间,进而最终通过有的放矢的根据不同的交通条件下的总行程时间优化物流运输后,能够改善紧急情况下城镇的交通便利性。
[0036]
3、本发明提供的智能无人运输和物流系统和方法中的物流运输高架通道控制模块通过构建的非线性多维约束全局优化算法模型,进而对后期继续运行的若干个智能无人小车的信息收后,优化间接地提高高速交通的安全性,减少了智能无人物流运送高架通道拥堵,送货时间成本高的缺陷,并且减少道路运输对环境的影响;实时控制货运和客运。
附图说明
[0037]
在下文中将基于实施例并参考附图来对本发明进行更详细的描述。其中:
[0038]
图1为本发明提供的方法流程图;
[0039]
图2为本发明提供的装置的模块整体示意图;
[0040]
图3为本发明提供的装置的智能无人小车模块整体示意图。
[0041]
具体实施例方式
[0042]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0043]
如图1所示,为本发明提供的一种智能无人物流运输方法的流程图,该智能无人物流运输方法基于背景技术中的中国专利2012101957158公开的城市智能交通运输系统进一步改进,该系统包括了轻型高架路通道、智能无人小车、节点车站、智能调度系统、通信系统、通道顶太阳能系统和物流服务系统,本发明的智能无人物流运输系统采用该背景技术中的基本框架仅仅运送货物,不进行客运,本发明提供的方法包括以下步骤:
[0044]
s1:物流发货客户确定若干个目的地;
[0045]
s2:物流控制系统根据1
‑
n若干个输入的出发地和目的地规划路径,控制若干个智能无人小车1在高架通道上运送货物,高架通道分为若干段子高架通道,每段子高架通道间设置有节点车站,若干个智能无人小车1在每段高架通道上的行驶状态造成高架通道上形成自由交通条件或拥挤交通条件;
[0046]
s3:大数据采集整理模块2接收若干个智能无人小车的数据信息,经过整理后发送给物流交通情况监测评估模块3;
[0047]
s4:物流交通情况监测评估模块3中的物流运输系统建模模块3
‑
1根据若干个智能
无人小车1的数据信息进行数据分析并建模,物流运输系统建模模块3
‑
1构建基于拥挤交通流附加时间损失估算总行程时间t的模型:
[0048][0049]
其中,t为若干个智能无人小车送货达到目的的总行程时间,单位为辆
·
h;l为高架通道的分段长度,单位为km;v(q)为若干个智能无人小车的平均行驶速度,单位为km/h;q为不拥挤的交通容量,单位为辆/h;δ是间隔时间,单位为h;v
crit
是通行能力下的临界速度,单位为km/h;t
loss
是与拥堵相关的行程时间损失,单位为辆
·
h;该模型中若干个智能无人小车的平均行驶速度v(q)的计算公式如下:
[0050][0051]
其中,v(q)为平均行驶速度,v0、l0、c0为模型参数;拥堵相关的行程时间损失t
loss
的计算公式如下:
[0052][0053]
其中,c为高架通道容量,单位为辆/h;a和b为拥堵相关的行程时间损失计算参数;
[0054]
s5:物流运输系统建模模块3
‑
1将建立的模型发送给物流运输高架通道控制模块3
‑
2,物流运输高架通道控制模块3
‑
2根据若干个智能无人小车的实时定位信息及交通拥堵情况计算高架通道上的若干个智能无人小车的平均交通延迟时间d(q),并构建非线性多维约束全局优化算法优化每个若干个智能无人小车在高架通道上的行走路线和所需的交通情况进而减少到达若干个目的地的物流运送时间,物流运输高架通道控制模块3
‑
2将每个智能无人小车的行走路线发送给该智能无人小车,并将智能无人小车所需的交通情况发送给区域交通流量控制模块4;
[0055]
s6:区域交通流量控制模块4向与其通信连接的高架通道上的交通信号灯控制模块5
‑
1、可变交通指示控制模块5
‑
2和可变交通信息板发送信号控制模块5
‑
3,交通信号灯、可变交通指示和可变交通信息板根据所需交通情况进行变化。交通信号灯控制模块5
‑
1、可变交通指示控制模块5
‑
2和可变交通信息板控制模块5
‑
3属于交通协调控制模块5。
[0056]
s5步骤中物流运输高架通道控制模块3
‑
2根据若干个智能无人小车的实时定位信息及交通拥堵情况计算高架通道上的若干个智能无人小车的平均交通延迟时间d(q)的计算公式如下:
[0057][0058]
其中,d(q)为平均延迟时间,单位为s;c为若干个智能无人小车送货的相位周期时间,单位为s;g为循环时间内的绿灯时间,单位为s;q为不拥挤的交通容量,单位为辆/h;c为
高架通道最大智能无人小车容量,单位为辆/h;t为d(q)的计算持续时间,单位为h;k为取决于物流运输高架通道控制模块(b
‑
2)设置的增量延迟因子,i为上游过滤和计量调整系数。
[0059]
s5步骤中物流运输高架通道控制模块3
‑
2构建的非线性多维约束全局优化算法模型如下:
[0060][0061]
其中,m为所述高架通道的总段数,t
j
(x)是第j段子高架通道内的若干个智能无人小车的总行程时间,单位为辆
·
h;d
j
(x)为所述第j段子高架通道内若干个智能无人小车的向所述目的地行进的平均延误时间,单位为车辆
·
h;x是第j段高架通道内所述若干个智能无人小车的最佳循环时间向量,单位为s;x
min
、x
max
分别是第j段子高架通道内所述若干个智能无人小车循环时间的最小和最大限制端点值;g(x)为不等式约束函数和h(x)为等式约束函数。
[0062]
大数据采集整理模块2接收若干个智能无人小车的gps地理信息数据,包括环境温度、环境湿度、风速和风向的气象信息数据,智能无人小车数量信息数据。
[0063]
实施例2
[0064]
如图2所示,系统包括若干个智能无人小车1、大数据采集整理模块、物流交通情况监测评估模块、区域交通流量控制模块4、交通协调控制模块,交通协调控制模块5包括交通信号灯控制模块5
‑
1、可变交通指示控制模块5
‑
2和可变交通信息板控制模块5
‑
3,物流交通情况监测评估模块2包括物流运输系统建模模块2
‑
1和物流运输高架通道控制模块2
‑
2。如图3所示,智能无人小车安装有gps定位模块、移动网络模块、环境温度模块、环境湿度模块、风速模块和风向模块。运送货物的智能无人小车配置具有定位功能的gps定位模块、移动网络模块、环境温度模块、环境湿度模块、风速模块和风向模块,能够通信的移动网络模块和监测气象环境的环境温度模块、环境湿度模块、风速模块和风向模块而具有先进的智能功能,能够为物流运输系统提供每个运送货物的智能无人小车的位置以及其所在的环境气象情况,进而通过大数据采集整理模块预处理以后,进行运送延迟时间的计算、交通拥挤情况进而规划最佳的运行路线减少运送的时间成本。
[0065]
测试例
[0066]
分析了使用交通灯控制系统与停用交通灯控制系统相比的优势,并从控制车辆进入高速公路的已知算法的比较角度对结果进行了评价。调查了以下情况。分别采用如下三种方案进行比较分析本发明提供的智能无人运输和物流系统以及方法的性能,三种方案分别为方案a:采用专利202010560392.2中的导航方法,但是其方法中没有高架通道的延迟时间测量计量系统和方法;方案b:采用局部算法alinea;方案c:采用本发明提供的系统和方法。基于随机生成的交通需求和通行能力时间序列的1000次模拟运行,分析了由此产生的出行时间损失。在57.6%的模拟运行中,本发明提供的智能无人小车进入高架通道的控制
算法使行程时间损失最小。仅考虑高峰交通条件,智能无人小车进入高架通道的控制算法在87.7%的模拟运行中取得了最好的效果。
[0067]
虽然已经参考优选实施例对本发明进行了描述,但在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1