一种基于虚拟现实的交互控制器的制作方法
1.本实用新型涉及虚拟现实技术领域,更具体地说,涉及一种基于虚拟现实的交互控制器。
背景技术:
2.vr虚拟现实技术是一种可以创建和体验虚拟世界的计算机仿真系统,它利用计算机生成一种模拟环境,是一种多源信息融合的、交互式的三维动态视景和实体行为的系统仿真,使用户沉浸到该环境中。目前,在虚拟现实系统中,强调人与虚拟世界之间以自然的方式进行交互,如人的走动、头的转动、手的移动等方式与虚拟现实系统交互,并借助于虚拟现实系统中特殊的硬件设备(如数据手套、力反馈设备),实时产生真实世界中一样的感知。然而,在进行虚拟现实体验时,由于虚拟环境之间的信息转换出现延迟,使得用户会产生眩晕、视觉疲劳的感觉,导致用户体验感不佳。
3.因此,如何提高虚拟环境之间的信息转换的质量成为本领域技术人员亟需解决的技术问题。
技术实现要素:
4.本实用新型要解决的技术问题在于,针对现有技术的上述在进行虚拟现实体验时,由于虚拟环境之间的信息转换出现延迟的缺陷,提供一种图像融合平滑且输出图像质量较高的基于虚拟现实的交互控制器。
5.本实用新型解决其技术问题所采用的技术方案是:构造一种基于虚拟现实的交互控制器,具备;
6.图像数据采集器,其配置于虚拟现实眼镜的前端,用于获取一组或多组图像数据;
7.图像数据接收处理器,其信号输入端耦接于所述图像数据采集器的输出端,用于接收所述图像数据,并对输入的所述图像数据进行仿真及拼接处理,以建立虚拟环境;
8.vr智能显示屏,其输入端与所述图像数据接收处理器的信号输出端连接,用于接收所述虚拟环境,并根据所述虚拟环境的当前状态,将所述虚拟环境进行虚物实化。
9.在一些实施方式中,所述图像数据接收处理器根据傅立叶变换相位相关度算法对所述图像数据进行仿真及拼接处理。
10.在一些实施方式中,所述图像数据采集器为360度全景摄像机。
11.在一些实施方式中,还包括电源电路,所述电源电路的输出端分别与所述图像数据采集器、所述图像数据接收处理器及所述vr智能显示屏的电源输入端电性连接。
12.在一些实施方式中,所述电源电路包括第一电源芯片及第二电源芯片,
13.所述第一电源芯片及所述第二电源芯片的输入端与电源端连接,
14.所述第一电源芯片输出1.8v电压;
15.所述第二电源芯片输出2.8v电压。
16.在本实用新型所述的基于虚拟现实的交互控制器中,包括用于获取一组或多组图
像数据的图像数据采集器、图像数据接收处理器及vr智能显示屏,其中,图像数据接收处理器用于接收图像数据,并对输入的图像数据进行仿真及拼接处理,以建立虚拟环境;vr智能显示屏根据虚拟环境的当前状态,将虚拟环境进行虚物实化。与现有技术相比,通过图像数据接收处理器对图像数据进行仿真及拼接处理,以解决虚拟环境之间的信息转换出现延迟而导致用户会产生眩晕、视觉疲劳的问题。
附图说明
17.下面将结合附图及实施例对本实用新型作进一步说明,附图中:
18.图1是本实用新型提供基于虚拟现实的交互控制器一实施例结构原理图;
19.图2是本实用新型提供基于虚拟现实的交互控制器一实施例的图像数据采集器原理图;
20.图3是本实用新型提供基于虚拟现实的交互控制器一实施例的电源电路图;
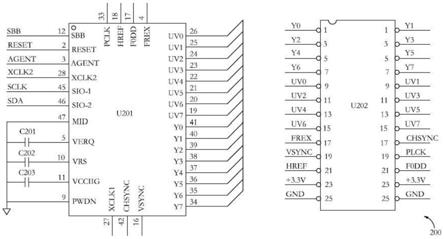
21.图4是本实用新型提供基于虚拟现实的交互控制器一实施例的图像数据接收处理器原理图。
具体实施方式
22.为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本实用新型的具体实施方式。
23.如图1
‑
图4所示,在本实用新型的基于虚拟现实的交互控制器的第一实施例中,基于虚拟现实的交互控制器包括图像数据采集器100、图像数据接收处理器200及vr智能显示屏(对应lcd)。
24.其中,图像数据采集器100包括图像传感器阵列u101及信号处理器u102。
25.具体而言,应用程序通过交互控制器的api调用摄像头驱动程序的流接口函数发送命令,驱动程序将接收到的命令转化为对外部设备的相应操作,实现对图像传感器阵列u101的初始化,图像传感器阵列u101接收由处理器的数据总线发送的配置数据,正常工作之后将图像数据发送到信号处理器u102进行预处理,然后通过dma通道,将采集到的图像数据通过数据总线保存到内存的帧缓冲区中,帧缓冲区的图像数据能够被流接口驱动函数读取。
26.具体地,图像数据采集器100配置于虚拟现实眼镜的前端,其用于获取现实场景中的一组或多组图像数据,然后进行预处理,再输出至图像数据接收处理器200。
27.图像数据接收处理器200用于对输入的图像数据进行仿真及拼接处理。
28.具体地,图像数据接收处理器200包括微控制器u201及可编程控制器u202。
29.具体而言,微控制器u201与可编程控制器u202的接口通过uv0
‑‑
uv7及y0
‑‑
y7进行图像数据传输,vsync是图像帧同步信号,href是图像的行同步信号,pclk是图像数据时钟在时钟的上升沿,图像数据发生跳变。
30.具体地,图像数据接收处理器200的信号输入端耦接于图像数据采集器100的输出端,更为具体地,微控制器u201的信号输入端(对应sda端)与信号处理器u102的信号输出端(对应15脚,即sda端)连接,微控制器u201用于接收信号处理器u102(属于图像数据采集器100)输入的图像数据,并对输入的图像数据进行仿真及拼接处理,以建立虚拟环境。
31.需要说明的是,图像数据接收处理器100是根据傅立叶变换相位相关度算法对图像数据进行仿真及拼接处理。
32.具体而言,基于傅立叶变换相位相关度算法如下:
33.1)、输入频谱重复的两幅图像f1和f2;
34.2)、计算两幅图像的傅立叶变换f1和f2;
35.3)、过滤直流部分和高频噪音,频谱分量简单相乘;
36.4)、计算规格化互功率谱;
37.5)、对规格化互功率谱进行傅立叶反变换;
38.6)、在相关表面上找到峰值点坐标。
39.举例而言,相位相关度法由于较小计算时间开支而广泛应用在图像全局对齐中,一般的图像对齐算法都是基于空,然而相位相关度法是基于频域计算的,如二维傅立叶变换。
40.将两幅图像的平移矢量可以通过它们互功率谱的相位直接计算出来,也就是说,相位相关是基于互功率谱的相位估计的。
41.设两幅离散图像f1(x,y)和f2(x,y)在空间域简单的平移相关:
42.f1(x,y)=f2(x
‑
x0,y
‑
y0);
43.相应的傅立叶变换f1和f2是相关的:
[0044][0045]
两个图像f1和f2的规格化互功率谱用相应的傅立叶变换
[0046]
f1和f2表示时,相位相关度的公式如下:
[0047][0048]
需要说明的是,这里f*表示f复数的共轭,位移位置是在(x0,y0)。左边是规格化互功率谱,规格化互功率谱的傅立叶的反变换是互相关的,规格化互功率谱的结果是简单复指数,即相位差,相位差的傅立叶反变换是在平移运动坐标上的脉冲,也就是说,除了需要对齐两幅图像的偏移位置,其他任何地方几乎都是零。
[0049]
vr智能显示屏lcd的输入端与图像数据接收处理器200的信号输出端连接,其用于接收虚拟环境,并根据虚拟环境的当前状态,将虚拟环境进行虚物实化,通过图像数据接收处理器200对图像数据进行仿真及拼接处理,以解决虚拟环境之间的信息转换出现延迟而导致用户会产生眩晕、视觉疲劳的问题。
[0050]
举例而言,用户的两只眼睛看到的不同图像是分别产生的,用户带上特殊的眼镜后,一只眼睛只能看到奇数帧图像,另一只眼睛只能看到偶数帧图像,奇、偶帧之间的不同也就是视差就产生了立体感。
[0051]
在一些实施方式中,为了提高图像数据获取的质量,可将图像数据采集器设置为360度全景摄像机。
[0052]
具体地,全景虚拟现实是基于全景图像的真实场景虚拟现实技术,虚拟现实全景也就是vr全景,而全景是把相机环360度拍摄的一组或多组照片拼接成一个全景图像,通过计算机技术实现全方位互动式观看的真实场景还原展示。
[0053]
举例而言,f是照相机的焦距,将图像投影到以f为半径的柱面上:
[0054]
u=farctan(x/y)
[0055]
v=y
×
f/x2+f2这里(x,y)是平面图像坐标,(u,v)是柱面图像坐标。
[0056]
在图像样本投影到柱面上时,需要知道照相机的焦距参数。假定照相机绕过光心的垂直轴旋转,拍摄的一周图像样本序列就可以恢复焦距参数f。
[0057]
对于一个拼接的360度全景图,基宽度l也就是圆柱底面的周长,则照相机焦距(即柱面的半径)f=l/2π,因此,只要得到最终拼接的全景图像宽度就可以估算出照相机的焦距。利用相位相关度法计算相邻两幅图像间的对齐偏移,通过两两相邻的输入图像的对齐水平偏移t
kx
,累加得到圆柱底面的周长:l=∑t
kx
。
[0058]
在一些实施方式中,为了提高控制器工作的稳定性,可在控制器中设置电源电路101,电源电路101的输出端分别与图像数据采集器100、图像数据接收处理器200及vr智能显示屏lcd的电源输入端电性连接,为其提供工作电源。
[0059]
在一些实施方式中,电源电路101包括第一电源芯片u103及第二电源芯片u104,其中,第一电源芯片u103及第二电源芯片u104的输入端与电源端(对应vdd端)连接,输入的电源通过第一电源芯片u103及第二电源芯片u104处理后,分别输出1.8v电压及2.8v电压。
[0060]
上面结合附图对本实用新型的实施例进行了描述,但是本实用新型并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实用新型的启示下,在不脱离本实用新型宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本实用新型的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1