机器人视觉引导组装方法与流程
1.本发明涉及一种机器人视觉引导组装方法。
背景技术:
2.视觉系统研究的主要目标从摄像机获取图像,计算出物体在环境空间中的几何信息,从而获得用于三维重建和测量的信息。摄像机是2d图像和3d空间的一种映射,两者映射关系由摄像机参数决定。摄像机的标定过程就是获取摄像机参数的过程,即摄像机坐标系与机械手坐标系之间的转换关系。摄像机的标定是为了由二维图像获得三维空间信息的重要一步。其采用的方法为主动视觉标定法,该法是指在已知摄像机的某些运动信息下标定摄像机。运动信息包括定量和定性的信息,定量信息如摄像机在平台坐标系的某一方向上平移某一给定量、摄像机的二平移运动正交等,定性的信息则如摄像机单作纯平移运动或者纯旋转运动等。一般采用的是单轴标定法,将机械手沿某一方向(x或y)移动,移动获取多个点数据,然后按顺/逆时针旋转,获取多个点确定旋转中心,根据相应参数,生成一个3x3的矩阵。
3.现有技术通过人工移动机械手使物料点出现在视野的左上、中上、右上、左中、中间、右中、左下、中下、右下并拍照记录像素坐标,将对应的机械手点位和像素坐标依次保存,而这种人工标定方式通过人工移动带来的不同点位会丢失一致性没有达到稳定给定量。逐点手动标定保存数据增加了步骤繁琐程度;此外,现有技术还有通过运动程序结构进行标定,而旋转和平移的耦合,达不到纯平移或纯旋转的运动,并会增加程序框架的复杂性。因此目前需要研发出一种使用方便及能够保证稳定给定量的机器人视觉引导组装方法。
技术实现要素:
4.本发明所要解决的技术问题是克服现有技术的不足,提供了一种使用方便及能够保证稳定给定量的机器人视觉引导组装方法。
5.本发明所采用的技术方案是:本发明包括以下步骤:a、通过控制面板输入移动量或旋转角度;b、选择托盘标定、旋转相机标定、上相机标定及下相机标定中的其中一项标定功能;c、通过选取的标定功能分配标定计数点,由上位机输送标定计数位置数据,使机械手到达标定点位;d、指定相机进行拍照、数据输送,判断获取点位数;e、未达标则进行下一点位的移动、拍照,达标则关闭标定启动功能。
6.进一步,所述步骤b中的托盘标定包括以下步骤:f1、进入自动标定模式,通过面板设置移动量,在操作面板点击托盘标定;f2、标定计数初始化为11,上位机发送移动量、标定计数以及运动指令给机械手;
f3、机械手达到托盘标定位后反馈信息至上位机;f4、上位机发送拍照指令,托盘相机进行拍照并反馈数据给上位机,上位机将数据传输给机械手,标定计数加1;f5、判断9个点位是否走完,未完成则重复到达点位拍照步骤,完成则复位托盘标定启动。
7.进一步,所述步骤b中的上相机标定包括以下步骤:g1、进入自动标定模式,通过面板设置移动量,在操作面板点击上相机标定;g2、标定计数初始化为1,上位机发送移动量、标定计数以及运动指令给机械手;g3、机械手达到标定位后反馈信息至上位机;g4、上位机发送拍照指令,上相机进行拍照并反馈数据给上位机,上位机将数据传输给机械手,标定计数加1;g5、判断5个点位是否走完,未完成则重复到达点位拍照步骤,完成则复位上相机标定启动。
8.进一步,所述步骤b中的下相机标定包括以下步骤:h1、进入自动标定模式,通过面板设置移动量,在操作面板点击下相机标定;h2、标定计数初始化为1,上位机发送移动量、标定计数以及运动指令给机械手;h3、机械手达到标定位后反馈信息至上位机;h4、上位机发送拍照指令,下相机进行拍照并反馈数据给上位机,上位机将数据传输给机械手,标定计数加1;h5、判断5个点位是否走完,未完成则重复到达点位拍照步骤,完成则复位下相机标定启动。
9.进一步,所述步骤b中的旋转相机标定包括以下步骤:i1、进入自动标定模式,通过面板设置旋转角度,在操作面板点击旋转标定;i2、标定计数初始化为6,上位机发送移动量、标定计数以及运动指令给机械手;i3、机械手达到标定位后反馈信息至上位机;i4、上位机发送拍照指令,下相机进行拍照并反馈数据给上位机,上位机将数据传输给机械手,标定计数加1;i5、判断4个点位是否走完,未完成则重复到达点位拍照步骤,完成则复位旋转标定启动。
10.进一步,所述上位机为plc控制机。
11.本发明的有益效果是:相对于现有技术的不足,在本发明中,面对手动标定,更新为自动标定流程。给出需求移动量以及旋转角度,自动控制到达需求点进行拍照、传输数据、进行运算,保证了稳定的给定量,解决了手动标定的繁琐人工步骤。整体自动程序上使用大致框架且启动点单一,对于点标定、旋转标定和托盘标定的操作可以简单实现,通过程序中不同的运动约束(如纯平移或纯旋转),来避免旋转和平移的耦合,所以,本发明具有使用方便及能够保证稳定给定量的优点。
附图说明
12.图1是本发明的逻辑流程图;
图2是托盘标定的逻辑流程图;图3是上相机标定的逻辑流程图;图4是下相机标定的逻辑流程图;图5是旋转相机标定的逻辑流程图;图6是本发明的结构图。
具体实施方式
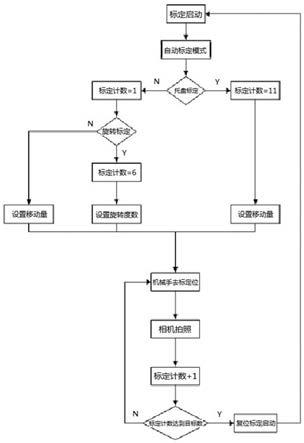
13.如图1所示,在本实施例中,本发明包括以下步骤:a、通过控制面板输入移动量或旋转角度;b、选择托盘标定、旋转相机标定、上相机标定及下相机标定中的其中一项标定功能;c、通过选取的标定功能分配标定计数点,由上位机输送标定计数位置数据,使机械手到达标定点位;d、指定相机进行拍照、数据输送,判断获取点位数;e、未达标则进行下一点位的移动、拍照,达标则关闭标定启动功能。
14.如图2所示,在本实施例中,所述步骤b中的托盘标定包括以下步骤:f1、进入自动标定模式,通过面板设置移动量,在操作面板点击托盘标定;f2、标定计数初始化为11,上位机发送移动量、标定计数以及运动指令给机械手;f3、机械手达到托盘标定位后反馈信息至上位机;f4、上位机发送拍照指令,托盘相机进行拍照并反馈数据给上位机,上位机将数据传输给机械手,标定计数加1;f5、判断9个点位是否走完,未完成则重复到达点位拍照步骤,完成则复位托盘标定启动。
15.如图3所示,在本实施例中,所述步骤b中的上相机标定包括以下步骤:g1、进入自动标定模式,通过面板设置移动量,在操作面板点击上相机标定;g2、标定计数初始化为1,上位机发送移动量、标定计数以及运动指令给机械手;g3、机械手达到标定位后反馈信息至上位机;g4、上位机发送拍照指令,上相机进行拍照并反馈数据给上位机,上位机将数据传输给机械手,标定计数加1;g5、判断5个点位是否走完,未完成则重复到达点位拍照步骤,完成则复位上相机标定启动。
16.如图4所示,所述步骤b中的下相机标定包括以下步骤:h1、进入自动标定模式,通过面板设置移动量,在操作面板点击下相机标定;h2、标定计数初始化为1,上位机发送移动量、标定计数以及运动指令给机械手;h3、机械手达到标定位后反馈信息至上位机;h4、上位机发送拍照指令,下相机进行拍照并反馈数据给上位机,上位机将数据传输给机械手,标定计数加1;h5、判断5个点位是否走完,未完成则重复到达点位拍照步骤,完成则复位下相机标定启动。
17.如图5所示,所述步骤b中的旋转相机标定包括以下步骤:i1、进入自动标定模式,通过面板设置旋转角度,在操作面板点击旋转标定;i2、标定计数初始化为6,上位机发送移动量、标定计数以及运动指令给机械手;i3、机械手达到标定位后反馈信息至上位机;i4、上位机发送拍照指令,下相机进行拍照并反馈数据给上位机,上位机将数据传输给机械手,标定计数加1;i5、判断4个点位是否走完,未完成则重复到达点位拍照步骤,完成则复位旋转标定启动。
18.在本实施例中,所述上位机为plc控制机。
19.如图6所示,该流程由plc、机械手、工控机以及hmi协作完成,经过交换机和通信协议互相进行数据传输。人工操作hmi界面对plc程序进行功能实现以及设定参数,plc程序对机械手、相机、光源控制器进行动作控制。机械手与相机的数据传输经过plc进行中转即转换。
20.虽然本发明的实施例是以实际方案来描述的,但是并不构成对本发明含义的限制,对于本领域的技术人员,根据本说明书对其实施方案的修改及与其他方案的组合都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1