一种智能船舶避碰能力评估系统的制作方法
1.本发明属于船舶领域,涉及一种船舶评估系统,更具体地,涉及一种智能船舶避碰能力评估系统。
背景技术:
2.近年来,智能船舶越来越多的被人提起,全世界很多国家早已开始智能船舶技术的相关研发。我国对智能船舶相继提出了多个相关的政策性文件,为智能船舶的发展提供了新的方向,越来越多的科研院所、高校及公司已经加入到智能船舶技术的研究当中。
3.由于船舶的特殊性,使得避碰成为船舶航行过程中的一个至关重要的因素。自主避碰技术作为保证智能船舶安全性的重要一环,更应该受到重视。只有对自主避碰进行全面、客观、有效的测试,才能保证智能船舶能够实现安全可靠的运营。
4.如何针对得到的测试数据进行评价,得到准确可靠的评价结果是智能船舶能够保证其安全性的关键。但是,现阶段还没有一种评估系统能够对避碰测试结果完成可靠评估。
5.因此,一种能够正确评估测试结果的智能船舶避碰能力评估系统成为本领域技术人员亟需解决的技术问题。
技术实现要素:
6.为了解决上述现有技术中存在的缺陷和不足,本发明提出了一种能够正确评估避碰测试结果的智能船舶避碰能力评估系统,其能够全面评估智能船舶的自主避碰能力,并为智能船舶的其它技术评估提供思路和方法。
7.为了实现上述目的,本发明提供如下技术方案:
8.一种智能船舶避碰能力评估系统,其包括数据采集模块、数据分析处理模块、评估模块和成绩判定模块,其特征在于,
9.所述数据采集模块与来自避碰功能虚拟仿真系统的数据源或避碰实船测试系统的数据源相连接,以采集船舶基本性能数据、感知模块数据、认知模块数据、决策模块数据、控制模块数据和效果数据;
10.所述数据分析处理模块用于将采集到的数据进行处理和分析,以获得效率性评估指标的各影响因素的数据、安全性评估指标的各影响因素的数据、经济性评估指标的各影响因素的数据、生态性评估指标的各影响因素的数据和社会性评估指标的各影响因素的数据;
11.所述评估模块利用所述数据分析处理模块处理后的数据进行效率性评估指标、安全性评估指标、经济性评估指标、生态性评估指标和社会性评估指标的计算,得到各项评估指标的评估分数;
12.所述成绩判定模块用于将所述评估模块得到的各项评估指标的评估分数以加权的方式进行综合处理,得到百分制的最终评估分数。
13.优选地,其中,所述船舶基本性能数据包括船长、船舶回转性指数和应舵指数;所
述感知模块数据包括船舶周围的环境数据、海况数据、船速数据、航向数据、船舶六自由度姿态数据、他船位置数据和他船状态数据;所述认知模块数据包括船舶与碍航物的相对距离数据、船舶态势判断数据以及船舶与碍航物的会遇时间数据;所述决策模块数据包括船舶航速数据、船舶航向数据和船舶期望位置数据;所述控制模块数据包括船舶舵角和船舶主机功率;所述效果数据包括避碰完成时间、避碰过程经过的总里程和避碰决策命令更新时间。
14.优选地,其中,所述船舶周围的环境数据包括能见度数据和测试时间数据;所述海况数据包括风速等级数据和波浪等级数据;所述船舶六自由度姿态数据包括船舶横摇数据、纵摇数据、艏摇数据、横荡数据、纵荡数据和垂荡数据;所述他船状态数据包括他船航速数据和他船航向数据。
15.优选地,其中,获得的效率性评估指标的各影响因素的数据包括避碰完成时间、避碰过程经过的总里程和避碰决策命令更新时间。
16.优选地,其中,获得的安全性评估指标的各影响因素的数据包括:
17.(1)、t时刻的船舶方位变化率r
t
[0018][0019]
其中:表示t时刻的船舶艏向角,表示t
‑
δt时刻的船舶艏向角,δt表示两次采样的时间间隔;
[0020]
(2)、船舶航迹偏移量|ab|
t
[0021][0022]
其中:b代表船舶当前位置点a在全局路径航线上的垂直投影点,(x
t
,y
t
)为a点的高斯平面直角坐标,(x
t
,y
t
)为b点的高斯平面直角坐标;
[0023]
(3)、航线转向角
[0024]
航线转向角是船舶相邻两段局部规划航线的夹角角度θ,
[0025][0026]
其中:k2表示前一段的局部规划航线的斜率,k1表示后一段的局部规划航线的斜率;
[0027]
(4)、局部路径航道宽度与船宽的比值a
[0028]
a=b/b
[0029]
其中:b为船宽,b为航道宽度;
[0030]
(5)、局部路径航道水深与船舶吃水的比值c
[0031]
c=d/d
[0032]
其中:d为船舶吃水,d为航道水深。
[0033]
优选地,其中,获得的经济性评估指标的各影响因素的数据为耗油量s,
[0034][0035]
其中:p
me
为实际主机功率,sfoc
me
为主机燃油消耗率,p
ae
为实际副机功率,sfoc
ae
为
副机燃油消耗率,t为船舶的航行时间。
[0036]
优选地,其中,获得的生态性评估指标的各影响因素的数据包括:
[0037]
(1)、废气排放量
[0038][0039]
上式适用于主机no
x
、hc排放因子和副机no
x
、hc、co、co2排放因子的计算;
[0040][0041]
上式适用于主机co、co2排放因子的计算;
[0042]
其中:为编号为i的主机或副机排放的废气成分编号为k的排放因子,fl为主机负荷百分比,a,b,c为拟合系数;
[0043]
(2)、废水排放量p
[0044]
p=dr*t
[0045]
其中:dr为排放速率,t为船舶的航行时间。
[0046]
优选地,其中,获得的社会性评估指标的各影响因素的数据为人员满意度,所述人员满意度是指人员对船舶所处环境安全度的估计,包括三方面的内容,分别是环境因素、船舶因素和人为因素,其中,
[0047]
环境因素的权重为:
[0048][0049]
其中:f
v
为不同能见度下船舶航行安全系数,为f
v
的权重系数,f
f
为不同风浪等级下船舶航行安全系数,为的f
f
的权重系数,f
d
为不同测试时间段内的安全系数,为f
d
的权重系数;
[0050]
船舶因素权重为:
[0051][0052]
其中:f
l
为不同船舶长度下船舶航行安全系数,为f
l
的权重系数,f
r
为不同会遇船舶间距下船舶航行安全系数,为f
r
的权重系数,f
b
为会遇船舶不同相对方位船舶航行安全系数,为f
b
的权重系数,f
k
为船舶操纵性能航行安全系数,为f
k
的权重系数,f
s
为船速对船舶航行安全系数的影响,为f
s
的权重系数;
[0053]
人为因素权重为:
[0054][0055]
其中:f
j
为专业技能对船舶航行安全系数的影响,为f
j
的权重系数,f
m
安全管理对船舶航行安全系数的影响,为f
m
的权重系数,f
j
为精神状态对船舶航行安全系数的影响,为f
j
的权重系数;
[0056]
人员满意度为:
[0057][0058]
其中,c为隶属度矩阵。
[0059]
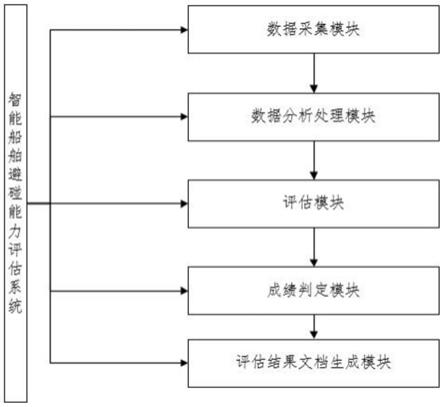
优选地,其中,所述智能船舶避碰能力评估系统进一步包括评估结果文档生成模块,所述评估结果文档生成模块用于将各项评估指标及其评价分数以图表的形式生成txt文档或pdf文件。
[0060]
与现有技术相比,本发明的智能船舶避碰能力评估系统具有如下有益技术效果:
[0061]
1、该评估系统能够接收多种数据输入方式,能够实现对整个智能船舶避碰功能的多方面评估,增加评估的可靠性;
[0062]
2、该评估系统的数据分析模块能够对数据进行提取并进行相应的计算,产生更多的评估指标,增加评估结果丰富性;
[0063]
3、该评估系统能够解决现阶段无法对智能船舶避碰测试结果进行统一标准的处理评估的问题,并且多方面的评估能够形成准确可靠的评估结果,并且能够对智能船舶其它功能评估提供参考。
附图说明
[0064]
图1是本发明的智能船舶避碰能力评估系统的构成示意图。
[0065]
图2是本发明的评估模块在对各项评估指标进行评估是所使用到的隶属函数图像。
具体实施方式
[0066]
下面结合附图和实施例对本发明进一步说明,实施例的内容不作为对本发明的保护范围的限制。
[0067]
本发明涉及一种能够正确评估避碰测试结果的智能船舶避碰能力评估系统,其能够全面评估智能船舶的自主避碰能力,并为智能船舶的其它技术评估提供思路和方法。
[0068]
图1示出了本发明的智能船舶避碰能力评估系统的构成示意图。如图1所示,本发明的智能船舶避碰能力评估系统包括数据采集模块、数据分析处理模块、评估模块和成绩判定模块。
[0069]
其中,所述数据采集模块可以与来自避碰功能虚拟仿真系统的数据源或避碰实船测试系统的数据源相连接,以采集相关数据。
[0070]
在本发明中,由于所述数据采集模块可以与来自避碰功能虚拟仿真系统的数据源或避碰实船测试系统的数据源相连接,所以其能够接收多种数据输入方式,能够实现对整个智能船舶避碰功能的多方面评估,增加评估的可靠性。
[0071]
采集的数据源中的相关数据包括采集船舶基本性能数据、感知模块数据、认知模块数据、决策模块数据、控制模块数据和效果数据。
[0072]
其中,所述船舶基本性能数据包括船长、船舶回转性指数和应舵指数。
[0073]
所述感知模块数据包括船舶周围的环境数据、海况数据、船速数据、航向数据、船舶六自由度姿态数据、他船位置数据和他船状态数据。
[0074]
所述船舶周围的环境数据包括能见度数据和测试时间数据。所述海况数据包括风速等级数据和波浪等级数据。所述船舶六自由度姿态数据包括船舶横摇数据、纵摇数据、艏摇数据、横荡数据、纵荡数据和垂荡数据。所述他船状态数据包括他船航速数据和他船航向数据。
[0075]
所述认知模块数据包括船舶与碍航物的相对距离数据、船舶态势判断数据以及船舶与碍航物的会遇时间数据。
[0076]
所述决策模块数据包括船舶航速数据、船舶航向数据和船舶期望位置数据。
[0077]
所述控制模块数据包括船舶舵角和船舶主机功率。
[0078]
所述效果数据包括避碰完成时间、避碰过程经过的总里程和避碰决策命令更新时间。
[0079]
上述各项数据都可以从避碰功能虚拟仿真系统的数据源或避碰实船测试系统的数据源中直接得到。
[0080]
在采集了上述各项数据之后,所述数据分析处理模块用于将采集到的上述各种数据进行处理和分析,以获得各项评估指标的各影响因素的数据。
[0081]
在本发明中,为了实现对避碰能力的全面评估,所述评估指标包括效率性评估指标、安全性评估指标、经济性评估指标、生态学评估指标和社会学评估指标。
[0082]
其中,所述效率性评估指标的影响因素有三个,分别为避碰完成时间、避碰过程经过的总里程和避碰决策命令更新时间,其可以从上述的效果数据中直接得到。
[0083]
所述安全性评估指标的影响因素有五个,分别为:(1)、t时刻的船舶方位变化率r
t
;(2)、船舶航迹偏移量;(3)航线转向角;(4)、局部路径航道宽度与船宽的比值;和(5)、局部路径航道水深与船舶吃水的比值。具体地,
[0084]
(1)、t时刻的船舶方位变化率r
t
[0085][0086]
其中:表示t时刻的船舶艏向角,表示t
‑
δt时刻的船舶艏向角,δt表示两次采样的时间间隔。
[0087]
(2)、船舶航迹偏移量|ab|
t
[0088][0089]
其中:b代表船舶当前位置点a在全局路径航线上的垂直投影点,(x
t
,y
t
)为a点的高斯平面直角坐标,(x
t
,y
t
)为b点的高斯平面直角坐标。
[0090]
(3)、航线转向角
[0091]
航线转向角是船舶相邻两段局部规划航线的夹角角度θ,
[0092][0093]
其中:k2表示前一段的局部规划航线的斜率,k1表示后一段的局部规划航线的斜率。
[0094]
(4)、局部路径航道宽度与船宽的比值a
[0095]
a=b/b
[0096]
其中:b为船宽,b为航道宽度。
[0097]
(5)、局部路径航道水深与船舶吃水的比值c
[0098]
c=d/d
[0099]
其中:d为船舶吃水,d为航道水深。
[0100]
所述经济性评估指标的影响因素只有一个,为耗油量s。
[0101][0102]
其中:p
me
为实际主机功率,sfoc
me
为主机燃油消耗率,p
ae
为实际副机功率,sfoc
ae
为副机燃油消耗率,t为船舶的航行时间。
[0103]
所述生态性评估指标的影响因素有两个,分别为废气排放量和废水排放量。其中,
[0104]
(1)、废气排放量
[0105][0106]
上式适用于主机中尾气成份为no
x
、hc时的排放因子和副机中尾气成份为no
x
、hc、co、co2时的排放因子的计算。
[0107][0108]
上式适用于主机中尾气成份为co、co2时的排放因子的计算。
[0109]
其中:为编号为i的主机或副机排放的废气成分编号为k的排放因子,fl为主机负荷百分比,a,b,c为拟合系数。
[0110]
(2)、废水排放量p
[0111]
p=dr*t
[0112]
其中:dr为废水排放速率,t为船舶的航行时间。
[0113]
所述社会性评估指标主要指的是人员满意度。所述人员满意度是指人员对船舶所处环境安全度的估计,包括三方面的内容,分别是环境因素、船舶因素和人为因素。其中,
[0114]
环境因素的权重为:
[0115][0116]
其中:f
v
为不同能见度下船舶航行安全系数,为f
v
的权重系数,f
f
为不同风浪等级下船舶航行安全系数,为的f
f
的权重系数,f
d
为不同测试时间段内的安全系数,为f
d
的权重系数。
[0117]
船舶因素权重为:
[0118][0119]
其中:f
l
为不同船舶长度下船舶航行安全系数,为f
l
的权重系数,f
r
为不同会遇船舶间距下船舶航行安全系数,为f
r
的权重系数,f
b
为会遇船舶不同相对方位船舶航行安全系数,为f
b
的权重系数,f
k
为船舶操纵性能航行安全系数,为f
k
的权重系数,f
s
为船速对船舶航行安全系数的影响,为f
s
的权重系数。
[0120]
人为因素权重为:
[0121][0122]
其中:f
j
为专业技能对船舶航行安全系数的影响,为f
j
的权重系数,f
m
安全管理对船舶航行安全系数的影响,为f
m
的权重系数,f
j
为精神状态对船舶航行安全系数的影响,为f
j
的权重系数。
[0123]
则人员满意度s
d
为:
[0124][0125]
其中,c为隶属度矩阵。
[0126]
通过以上方式,获得了效率性评估指标的各影响因素的数据、安全性评估指标的各影响因素的数据、经济性评估指标的各影响因素的数据、生态性评估指标的各影响因素的数据和社会性评估指标的各影响因素的数据。
[0127]
所述评估模块利用所述数据分析处理模块处理后的数据,也就是,效率性评估指标的各影响因素的数据、安全性评估指标的各影响因素的数据、经济性评估指标的各影响因素的数据、生态性评估指标的各影响因素的数据和社会性评估指标的各影响因素的数据,进行效率性评估指标、安全性评估指标、经济性评估指标、生态性评估指标和社会性评估指标的计算,得到各项评估指标的评估分数。
[0128]
具体采用何种方法计算各项评估指标,以得到各项评估指标的评估分数不是本发明的重点,其可以采用现有技术中具有的任何计算方法。下面以给一种示例性的方式描述如何进行各项评估指标的计算。
[0129]
一、对效率性评估指标、安全性评估指标、经济性评估指标、生态性评估指标和社会性评估指标中的每一项评估指标分别进行计算。
[0130]
设某项评估指标的评语集分布如下:
[0131]
评价等级优良中差数据abcd
[0132]
采用三角函数作为隶属函数,则其隶属函数图像如图2所示。
[0133]
则属于等级“优”的隶属函数为:
[0134][0135]
属于等级“良”的隶属函数为:
[0136][0137]
属于等级“中”的隶属函数为:
[0138][0139]
属于等级“差”的隶属函数为:
[0140][0141]
依据上述各个隶属函数,可以得到该项评估指标的各影响因素的隶属度向量p
ij
。其中,i代表评估指标的个数,在本发明中,共有效率性评估指标、安全性评估指标、经济性评估指标、生态性评估指标和社会性评估指标五个评估指标,因此,i的取值为1到5;j代表某些评估指标中影响因素的个数,例如,效率性评估指标有三个影响因素,因此,对于效率性评估指标,j的取值为1到3。
[0142]
由此,在本发明中,通过各项评估指标的各影响因素的隶属度向量p
ij
可以组成效率性评估指标、安全性评估指标、经济性评估指标、生态性评估指标和社会性评估指标等各项评估指标的评价矩阵r
i
,运用算子合成运算进行各一级的综合评判,得到各项评估指标的计算值,计算公式如下:
[0143][0144]
其中:a
i
=[u
i1
,u
i2
,
…
,u
ij
]为评价指标中各影响因素的权重。
[0145]
得到二级评价矩阵,也就是,五个评估指标的矩阵,
[0146]
利用二级评价矩阵计算效率性评估指标、安全性评估指标、经济性评估指标、生态性评估指标和社会性评估指标的评价结果步骤如下:
[0147]
首先得到关于各一级评价指标的评判向量v
i
(v
i
=(μ1,μ2,μ3,μ4))对评判等级进行赋值如下:
[0148]
评价等级优良中差评价等级分值p10.80.60.4
[0149]
在进行完上述工作后,可以进行评估结果的确定,采用加权和的形式进行打分(百分制)确定:
[0150][0151]
其中,p
i
为评价等级分值,μ
i
为各因素隶属度。c为得到的各一级指标的百分制评价值。
[0152]
同样运用算子合成运算进行一级综合评判,计算公式如下:
[0153][0154]
其中:b=[u1,u2,
…
,u5]为效率性、安全性、经济性、生态性和社会性五个评估指标的权值矩阵。
[0155]
所述成绩判定模块用于将所述评估模块得到的各项评估指标的评估分数以加权的方式进行综合处理,得到百分制的最终评估分数。
[0156]
此外,在本发明中,优选地,所述智能船舶避碰能力评估系统进一步包括评估结果文档生成模块。所述评估结果文档生成模块用于将各项评估指标及其评价分数以图表的形式生成txt文档或pdf文件。
[0157]
这样,在利用本发明的智能船舶避碰能力评估系统时,其工作流程如下:
[0158]
(1)将该智能船舶避碰能力评估系统接入避碰功能虚拟仿真系统或避碰实船测试系统以获取实时输入数据,或输入已经采集到的离线数据;
[0159]
(2)选择要进行评估的方面并进行评估操作获得评估结果;
[0160]
(3)将评估结果导出到txt文件或pdf文件。
[0161]
本发明的智能船舶避碰能力评估系统能够接收多种数据输入方式,能够实现对整个智能船舶避碰功能的多方面评估,增加评估的可靠性。同时,该评估系统的数据分析模块能够对数据进行提取并进行相应的计算,产生更多的评估指标,增加评估结果丰富性。而且,该评估系统能够解决现阶段无法对智能船舶避碰测试结果进行统一标准的处理评估的问题,并且多方面的评估能够形成准确可靠的评估结果,并且能够对智能船舶其它功能评估提供参考。
[0162]
本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无法对所有的实施方式予以穷举。凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1