基于轮廓点集的行星表面导航路标匹配方法
1.本发明涉及基于轮廓点集的行星表面导航路标匹配方法,特别适用于深空探测导航过程中序列图像的匹配和着陆图像与数据库的匹配,属于深空探测领域。
背景技术:
2.行星探测将是未来深空探测最核心的任务之一,其中行星表面地形特征的匹配是光学自主导航的关键技术之一。深空探测航行距离远、通讯时间长,传统的基于地面测控的方式存在较大的通讯时延。另外,深空动力学环境复杂,基于地面遥控的导航模式已无法满足高精度导航的需要。随着计算机硬件技术的突破和发展,使得基于星载计算机的地形特征匹配技术成为研究热点。其中,陨石坑、岩石、沟壑、陡坡等作为常见的天然地形特征广泛存在于行星表面,在光照条件下具有明显亮暗对比的光学特性,仅需光学敏感器和星载计算机即可实现大范围的检测和提取,处理简单,便于跟踪,为图像匹配提供了大量的数据,应用前景广阔。因此,以行星表面地形作为导航路标的匹配方法,在行星探测方面得到了广泛的研究和应用。光学图像中行星表面导航路标能否正确匹配已成为决定任务成败的关键技术之一。
3.深空探测器在任务开始之前,通过长时间的观测绘制目标行星全局地图,其中包含导航路标形状轮廓、三维位置等数据信息。在后续的着陆等任务中,探测器实时拍摄目标区域图像,需要获取下降图像中导航路标的位置信息进行导航,从而估计自身状态。图像匹配是连接数据库地图和下降图像的桥梁,在导航路标检测和位姿估计之间发挥着承上启下的作用,是获取导航路标三维位置的重要信息来源。通过导航路标匹配为位姿估计算法提供正确的路标信息,从而确保探测器的导航精度。
4.由于拍摄环境的不同,行星表面导航路标的成像条件也不同,比如光照角度、拍摄姿态、拍摄距离等。这就造成拍摄图像与数据库地图中的导航路标存在差异,这种拍摄图像二维数据到地图二维数据的线性变换属于仿射变换,即导航路标在两幅图像中存在仿射变换,但是变换前后导航路标图形的平直性和平行性保持不变,这就为路标匹配提供了重要依据。
5.在已发展的行星表面导航路标匹配方法中,主要匹配对象集中于陨石坑路标特征,常用的方法包括基于图像的互相关匹配方法、基于陨石坑相互关系的匹配方法和基于陨石坑面积比仿射不变量的匹配方法。
6.在先技术[1](徐田来,崔祜涛,田阳,等.一种基于面积比的陨石坑匹配方法:中国,cn102999915a[p],2013
‑
03
‑
27.),提出一种基于不同陨石坑面积比的匹配算法,首先通过最大稳定极值区域方法对目标图像进行陨石坑配对检测,利用椭圆拟合算法计分别算两幅图像中陨石坑的面积。最后基于hausdorff距离,对两幅图像中的陨石坑进行遍历并判断相似性,认为相似度最高的两个陨石坑成功匹配。该算法在图像中陨石坑数量较多的情况下,由于遍历陨石坑的相似度,导致计算量过大,且基于hausdorff距离的匹配率不高,不适用于着陆下降这种实时性要求高的任务。
[0007]
在先技术[2](m.yu,h.cui,y.tian,a new approach based on crater detection and matching for visual navigation in planetary landing[j].advances in space research.53(2014)1810
‑
1821.),提出一种基于陨石坑面积比作为仿射不变量进行wta投票的匹配方法,该方法可以事先计算数据库地图中的陨石坑面积比,在任务实施阶段计算待匹配图像中陨石坑面积比,通过比较检测地图与数据库中陨石坑面积比匹配关系的数量,取待匹配图像中面积比匹配数量最多的陨石坑视为匹配成功。该算法不依赖探测器的姿态信息,但是对于陨石坑数量少于5个的图像匹配效果并不理想。
[0008]
在先技术[3](t.lu,w.hu,c.liu,et al.relative pose estimation of a lander using crater detection and matching[j].optical engineering,2016,55(2):023102.1
‑
023102.24.),提出一种利用陨石坑之间几何图案描述的陨石坑匹配算法,该算法需要计算图像中陨石坑的位置和半径,利用三个陨石坑的圆心构成三角形,通过三角形的三条边长和三个陨石坑的半径构造匹配矢量进行描述,基于匹配矢量对两幅图像遍历所有可能的三角形进行陨石坑匹配。该算法不适用于图像中陨石坑检测数量少于三个的情况以及非陨石坑的其他地形特征图像。
技术实现要素:
[0009]
本发明的目的是提供一种基于轮廓点集的行星表面导航路标匹配方法,在待匹配图像中导航路标存在旋转、平移、尺度缩放的变换情况下,实现待匹配图像与数据库地图中导航路标的匹配。
[0010]
本发明的目的是通过下述技术方案实现的。
[0011]
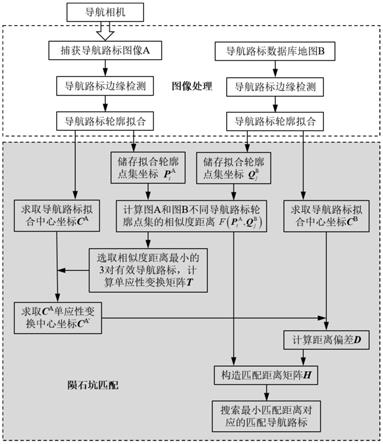
本发明公开的基于轮廓点集的行星表面导航路标匹配方法,探测器利用携带的光学相机对目标区域定向拍摄,星载计算机读取光学相机拍摄到的目标天体表面地形图像a之后,对图像a进行导航路标边缘的检测;同样地,针对数据库中的地图b,进行导航路标边缘的检测。分别对导航路标检测边缘进行拟合,通过导航路标拟合轮廓离散化,获得轮廓点集坐标。计算所得的离散点集p
ia
,的相似度距离f。选取点集相似度矩阵f中数值最小的三对导航路标作为有效匹配路标,并计算单应性变换矩阵t。由单应性变换矩阵求取待匹配图像导航路标中心坐标的仿射变换坐标,利用图b的导航路标中心像素坐标计算距离偏差d,构造匹配距离矩阵h并搜索匹配距离最小的导航路标作为匹配路标。
[0012]
本发明公开的基于轮廓点集的行星表面导航路标匹配方法,包括如下步骤:
[0013]
步骤一:探测器利用携带的光学相机对目标区域定向拍摄,星载计算机读取光学相机拍摄到的目标天体表面地形图像a之后,对图像a进行导航路标边缘的检测;同样地,针对数据库中的地图b,进行导航路标边缘的检测。
[0014]
步骤二:分别对导航路标检测边缘进行拟合,通过导航路标拟合轮廓离散化,获得轮廓点集坐标。
[0015]
对图a中检测到的m个导航路标中的第i(i=1,2,3,
…
,m)个导航路标检测边缘进行拟合,并对拟合轮廓进行离散化,计算并存储第i个导航路标拟合轮廓的离散点集坐标为
[0016]
同样地,数据库地图b中检测到的n个导航路标中的第j(j=1,2,3,
…
,n)个导航路
标边缘点集坐标为
[0017]
步骤三:计算步骤二所得的离散点集p
ia
,的相似度距离f。
[0018]
相似度距离用于判断两组点集数据的相似性,计算图像a和地图b中不同的两个导航路标轮廓点集之间的相似度距离,作为匹配方法中导航路标形状相似性的判断依据。对于检测图像a中第i个导航路标轮廓点集p
i
和数据库地图b中第j个导航路标轮廓点集q
j
,相似度距离表示为
[0019]
若检测图像a中共提取到m个导航路标,数据库地图b中储存了n个导航路标,将图像a中所有导航路标和数据库地图b中所有导航路标的相似度距离存储在一个m
×
n的点集相似度矩阵f中
[0020][0021]
作为优选,步骤三实现方法为:
[0022]
在完成两幅图像导航路标的边缘检测以及轮廓离散点集的获取后,对两组轮廓点集采取fr
é
chet距离描述路径相似性。fr
é
chet距离是在度量空间中任意两个集合之间定义的一种距离,着重考虑路径的空间距离,能够有效描述两组点集之间的相似程度。对于检测图像a中第i个导航路标轮廓点集p
i
和数据库地图b中第j个导航路标轮廓点集q
j
,fr
é
chet距离定义为:
[0023][0024]
其中inf(
·
)表示数据的下界,max(
·
)表示数据中的最大值,为检测图像中第i个导航路标轮廓点集p
i
和数据库地图中第j个导航路标轮廓点集的欧氏距离,和数据库地图中第j个导航路标轮廓点集的欧氏距离,和分别为图a中第i个导航路标轮廓点集坐标和图b中第j个导航路标的轮廓点集坐标。
[0025]
步骤四:选取点集相似度矩阵f中数值最小的三对导航路标作为有效匹配路标,并计算单应性变换矩阵t。
[0026]
令点集相似度矩阵f中最小的3个值所对应的行列序号为(i1,j1),(i2,j2)和(i3,j3),则有效匹配的三对路标所对应的图a和图b的导航路标中心像素坐标分别为),则有效匹配的三对路标所对应的图a和图b的导航路标中心像素坐标分别为和由这三对坐标计算仿射变换的单应性变换矩阵为t:
[0027]
[0028]
其中和分别为点集相似度矩阵f中最小值所对应的图a中第i1个导航路标的中心像素坐标和图b中第j1个导航路标的中心像素坐标,同样地,和分别为点集相似度矩阵f中次小值和第三小值所对应的图a中第i2和i3个导航路标的中心像素坐标,和分别为点集相似度矩阵f中次小值和第三小值所对应的图b中第j2和j3个导航路标的中心像素坐标。
[0029]
步骤五:由步骤四得到的单应性变换矩阵求取待匹配图像导航路标中心坐标的仿射变换坐标,利用图b的导航路标中心像素坐标计算距离偏差d,构造匹配距离矩阵h并搜索匹配距离最小的导航路标作为匹配路标。
[0030]
通过步骤四的单应性变换矩阵t,对图像a所有导航路标中心的像素坐标c
a
进行单应性变换,令图像a变换后的路标中心为c
a'
:
[0031][0032]
地图b的导航路标中心为c
b
:
[0033][0034]
其中为图a中第i个导航路标中心的像素坐标,为经过单应性变换后的像素坐标,为图b中第j个导航路标中心的像素坐标。
[0035]
由于误差的存在,图像a所有变换后的路标中心c
a'
与地图b中对应的导航路标中心不会完全重合,因此计算变换路标中心与地图b中导航路标中心的距离偏差为d:
[0036][0037][0037]
为图像a单应性变换后第i个导航路标中心坐标和数据库地图b中第j个导航路标中心坐标之间的欧氏距离。
[0038]
通过相似度距离矩阵f和偏差距离d中相应元素点积的形式计算匹配距离,并将其存储于m
×
n的匹配距离矩阵h中:
[0039][0040]
将匹配问题数学化,构造匹配矩阵w如下:
[0041][0042]
匹配矩阵w中的元素w
ij
为决策变量,其取值为0和1,w
ij
=0表示图a中的第i个导航路标和图b中的第j个导航路标不匹配,而w
ij
=1则表示图a中的第i个导航路标和图b中的第j个导航路标互相匹配
[0043]
由于检测到的导航路标数量少于数据库中路标的数量,因此匹配问题设定为由图像a到地图b的单向搜索,则图像a和地图b不同导航路标的匹配搜索问题如下:
[0044][0045][0046]
w
ij
={0,1}
ꢀꢀꢀ
(11)
[0047]
通过计算不同导航路标轮廓点集相似度和中心坐标偏差的匹配距离,搜索w
ij
使性能指标j最小化,从而确定匹配矩阵w,w矩阵中w
ij
=1的元素所在第i行和第j列的位置,表示待匹配图像a中的第i(i=1,2,3,
…
,m)个导航路标和地图b中第j(j=1,2,3,
…
,n)个导航路标互相匹配。
[0048]
还包括步骤六:基于步骤五匹配的导航路标确定深空探测器的位置姿态,从而提高深空探测器位置姿态的导航精度。
[0049]
有益效果
[0050]
1、本发明公开的基于轮廓点集的行星表面导航路标匹配方法,通过比较两幅图像的导航路标轮廓点集的相似性进行匹配,无需计算拟合面积比和导航路标之间相互关系等参数,仅需导航路标的检测边缘作为输入量即可实现匹配,而导航路标边缘拟合是图像检测的所必须的步骤,因此大大简化了解算复杂度和计算难度,算法简单,易于处理。
[0051]
2、本发明公开的基于轮廓点集的行星表面导航路标匹配方法,利用不同图像中导航路标轮廓的点集判断相似度,相比面积比的匹配方法,轮廓点集蕴含更多的形状信息,对于曲线相似度评价效果更好,对不同图像的导航路标匹配率更高,因此在后续的探测器位姿估计中,由于匹配到的导航路标更多,用于位姿解算的导航路标信息更加丰富,探测器位姿确定精度更高,导航效果更好。
[0052]
3、本发明公开的基于轮廓点集的行星表面导航路标匹配方法,匹配适用对象更加广泛,可对光学图像中陨石坑、岩石、沟壑等地形进行同时匹配,适用于序列图像以及数据
库地图的匹配和跟踪。
附图说明
[0053]
图1是本发明基于轮廓点集的行星表面导航路标匹配方法流程示意图;
[0054]
图2是本发明实例中模拟光学相机拍摄的待匹配原始光学图像a;
[0055]
图3是本发明实例中模拟数据库地图的原始光学图像b;
[0056]
图4是本发明实例仿真中待匹配图像a导航路标边缘检测的轮廓点集图像;
[0057]
图5是本发明实例仿真中数据库地图b导航路标边缘检测的轮廓点集图像;
[0058]
图6是本发明实例仿真中图像a和图像b中导航路标轮廓点集匹配结果。
[0059]
图7是本发明在先技术中图像a和图像b中导航路标面积匹配结果。
具体实施方式
[0060]
为了更好的说明本发明的目的和优点,下面结合附图和实例对发明内容做进一步说明。
[0061]
为了验证本发明的可行性,利用深空自主导航与控制工信部重点实验室的行星表面沙盘,通过相机从不同角度进行拍摄,模拟数据库地图(如图3)和仿射变换后的待匹配图像(如图2)。
[0062]
本实施例公开的基于轮廓点集的行星表面导航路标匹配方法,如图1所示,具体实现步骤如下:
[0063]
步骤一:探测器利用携带的光学相机对行星表面沙盘目标区域定向拍摄,星载计算机读取光学相机拍摄到的目标天体表面地形图像a(图2)之后,基于图像分割和形态学处理算法等计算机图形处理技术对图像a进行导航路标边缘的检测和提取。同样地,针对数据库地图b(图3),通过图形处理技术进行导航路标边缘检测。
[0064]
步骤二:分别对导航路标检测边缘进行拟合,通过导航路标拟合轮廓离散化,获得轮廓点集坐标。
[0065]
对图a中检测到的12个导航路标中的第i(i=1,2,3,
…
,12)个导航路标检测边缘进行拟合,并对拟合轮廓进行离散化,得到的图像a和图像b的导航路标边缘轮廓离散点集图像分别如图4和图5所示,图4检测到9个陨石坑和3个岩石共12个导航路标,图5检测到10个陨石坑和6个路标共16个导航路标。计算并存储图a中第i个导航路标拟合轮廓的离散点集坐标为同样地,数据库地图b中检测到的16个导航路标中的第j(j=1,2,3,
…
,16)个导航路标边缘点集坐标为
[0066]
步骤三:计算步骤二所得的离散点集p
ia
,的相似度距离f。
[0067]
相似度距离用于判断两组点集数据的相似性,计算图像a和地图b中不同的两个导航路标轮廓点集之间的相似度距离,作为匹配方法中导航路标形状相似性的判断依据。对于检测图像a中第i个导航路标轮廓点集p
i
和数据库地图b中第j个导航路标轮廓点集q
j
,相似度距离可以表示为
[0068]
检测图像a中共提取到12个导航路标,数据库地图b中储存了16个导航路标,将图
像a中所有导航路标和数据库地图b中所有导航路标的相似度距离存储在一个12
×
16的点集相似度矩阵f中
[0069][0070]
作为优选,步骤三实现方法为:
[0071]
在完成两幅图像导航路标的边缘检测以及轮廓离散点集的获取后,对两组轮廓点集采取fr
é
chet距离描述路径相似性。fr
é
chet距离是在度量空间中任意两个集合之间定义的一种距离,着重考虑路径的空间距离,能够有效描述两组点集之间的相似程度。对于检测图像a中第i个导航路标轮廓点集p
i
和数据库地图b中第j个导航路标轮廓点集q
j
,fr
é
chet距离定义为:
[0072][0073]
其中inf(
·
)表示数据的下界,max(
·
)表示数据中的最大值,为检测图像中第i个导航路标轮廓点集p
i
和数据库地图中第j个导航路标轮廓点集的欧氏距离,和数据库地图中第j个导航路标轮廓点集的欧氏距离,和分别为图a中第i个导航路标轮廓点集坐标和图b中第j个导航路标的轮廓点集坐标。
[0074]
步骤四:选取点集相似度矩阵f中数值最小的三对导航路标作为有效匹配路标,并计算单应性变换矩阵t。
[0075]
通过搜索,点集相似度矩阵f中最小的3个值所对应的行列序号为(6,8),(11,15)和(10,12),则有效匹配路标所对应的图a和图b的导航路标中心像素坐标分别为和(10,12),则有效匹配路标所对应的图a和图b的导航路标中心像素坐标分别为和由这三对坐标计算仿射变换的单应性变换矩阵为t:
[0076][0077]
其中和分别为点集相似度矩阵f中最小值所对应的图a中第6个导航路标的中心像素坐标和图b中第8个导航路标的中心像素坐标,同样地,和分别为点集相似度矩阵f中次小值和第三小值所对应的图a中第11和10个导航路标的中心像素坐标,和分别为点集相似度矩阵f中次小值和第三小值所对应的图b中第15和12个导航路标的中心像素坐标。
[0078]
通过单应性变换可以找到两幅图像导航路标像素点之间的一一对应关系,因此利
用3对点集相似度最高的导航路标中心求取的单应性变换矩阵t可用于计算图像a所有路标变换后的中心像素坐标。
[0079]
步骤五:由步骤四得到的单应性变换矩阵求取待匹配图像导航路标中心坐标的仿射变换坐标,利用图b的导航路标中心像素坐标计算距离偏差d,构造匹配距离矩阵h并搜索匹配距离最小的导航路标作为匹配路标。
[0080]
通过步骤四的单应性变换矩阵t,对图像a所有导航路标中心的像素坐标c
a
进行单应性变换,令图像a变换后的路标中心为c
a'
:
[0081][0082]
地图b的导航路标中心为c
b
:
[0083][0084]
其中为图a中第i个导航路标中心的像素坐标,为经过单应性变换后的像素坐标,为图b中第j个导航路标中心的像素坐标。
[0085]
由于误差的存在,图像a变换后的路标中心c
a'
与地图b中对应的导航路标中心不会完全重合,因此计算变换路标中心与地图b中导航路标中心的距离偏差为d:
[0086][0087][0087]
为图像a单应性变换后第i个导航路标中心坐标和数据库地图b中第j个导航路标中心坐标之间的欧氏距离。
[0088]
基于相似度距离f和偏差距离d,通过矩阵f和d中相应元素点积的形式计算匹配距离,存储于m
×
n的匹配距离矩阵h中:
[0089][0090]
将匹配问题数学化,构造匹配矩阵w如下:
[0091][0092]
匹配矩阵w中的元素w
ij
为决策变量,其取值为0和1,w
ij
=0表示图a中的第i个导航路标和图b中的第j个导航路标不匹配,而w
ij
=1则表示图a中的第i个导航路标和图b中的第j个导航路标互相匹配
[0093]
由于检测到的导航路标数量通常少于数据库中路标的数量,因此匹配问题设定为由图像a到地图b的单向搜索,则图像a和地图b不同导航路标的匹配搜索问题如下:
[0094][0095][0096]
w
ij
={0,1}
ꢀꢀꢀ
(22)
[0097]
通过计算不同导航路标轮廓点集fr
é
chet距离和中心坐标偏差的匹配距离,搜索w
ij
使性能指标j最小化,从而确定匹配矩阵w,w矩阵中w
ij
=1的元素所在第i行和第j列的位置,表示待匹配图像a中的第i(i=1,2,3,
…
,12)个导航路标和地图b第j(j=1,2,3,
…
,16)个导航路标互相匹配。得到最终的匹配图像如图6所示,经过统计本实例中所用到的两幅图像匹配率如表1所示。
[0098]
表1仿真结果
[0099][0100]
还包括步骤六:基于步骤五匹配的导航路标确定深空探测器的位置姿态,从而提高深空探测器位置姿态的导航精度。
[0101]
为了验证匹配结果的可靠性,利用拍摄的行星表面沙盘进行边缘检测,以此为基础分别通过本发明轮廓点集相似度的方法和在先技术中面积相似度的方法进行两幅图像的导航路标匹配,匹配结果分别如图6和图7所示。定义地图b中16个导航路标在目标天体固
联坐标系下三维坐标,令探测器在小天体固联坐标系下的初始位置为[510;
‑
320;4000]米,初始姿态为[24;
‑
6;23]度。视场角大小为30度,导航相机焦距为8mm,进行两种匹配结果的位姿估计验证。
[0102]
利用最小二乘法对探测器进行位姿估计仿真,位姿估计算法的输入量分别是图6中点集匹配的导航路标中心二维像素坐标及对应的三维坐标和图7中面积匹配方法的导航路标中心像素坐标和对应的三维坐标,最终本发明基于轮廓点集匹配的位姿估计结果如下:
[0103]
表2本实施例方法位姿确定结果
[0104][0105][0106]
而基于面积相似度的匹配结果由于存在误匹配,为检测图像中的导航路标赋予了错误的三维位置,因此导致位姿估计结果严重发散。由仿真结果可知,本发明所述基于轮廓点集的行星表面导航路标匹配方法能有效实现图像间导航路标的匹配,提高深空探测器位置姿态的导航精度。
[0107]
本发明基于导航路标轮廓点集仿射变换前后之间的匹配距离,通过最小化待匹配图像与数据库地图中导航路标轮廓点集的相似度距离和中心偏差距离,可以自主的搜索不同图像中对应的导航路标,为基于光学图像的深空探测任务中路标匹配问题提供了新思路,实现简单,易于操作。由图6可见,图像a中检测到的导航路标均与地图b的数据库导航路标实现了正确匹配,验证了本发明基于轮廓点集的行星表面导航路标匹配方法的正确性和有效性。
[0108]
至此,完成深空探测器所需基于轮廓点集的行星表面导航路标匹配方法。
[0109]
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1