一种基于图像的VIN等比例还原及字符识别方法与流程
一种基于图像的vin等比例还原及字符识别方法
技术领域
1.本发明涉及汽车技术领域,具体为一种基于图像的vin等比例还原及字符识别方法。
背景技术:
2.vin就是汽车的身份证号,为方便群众,公安部开始着手推行办理机动车转籍档案电子化,制作1:1等比例车架号图像进行存档,方便在转出转入地进行传递。
3.vin 1:1等比例图像的制作方法有两种:
4.一种是将人工拓印方式拓印的车辆上打刻的车辆识别代号拓印膜,通过1:1等比例扫描方式扫描,完成vin 1:1等比例图像制作;一种是直接采用图像采集设备,拍摄打刻在车辆上的车架号,直接生成车架号1:1等比例图像,实现vin 1:1等比例图像制作。
5.由于拓印方式易受人工拓印的质量影响,如涂刮力度、涂刮方向,粘贴等原因造成的变形,使得还原精度受到影响,无法实现真正的1:1还原。
6.采用图像采集设备直接还原的vin图像具有无损,高保真的特点,且可在生成还原图像的同时对vin字符区域进行提取识别,效率和准确率均有较大提升。因此开发vin图像还原识别系统具有十分重要的意义。
7.vin图像采集装置应包含平行激光发射器,用于获取待测平面上至少三点的空间坐标信息,激光波长应位于不可见光波段;还应包含可对红外及可见光成像的相机,可以为两个不同的相机,也可以为一个多波段成像相机加红外滤光片。
技术实现要素:
8.针对现有技术的不足,本发明提供了一种基于图像的vin等比例还原及字符识别方法,以解决上述背景技术中提出的问题。
9.为实现上述目的,本发明提供如下技术方案:一种基于图像的vin等比例还原及字符识别方法,具体提出了一种vin图像1:1等比例复原方法,包括以下步骤:
10.s1、使用图像采集装置获取10张以上棋盘格图片;
11.s2、拍摄包含平行激光发射器所发射的激光点或线的图片,提取激光点在图像中的坐标,通过激光发射接收器获取激光点到待测面的距离,通过步骤s1标定的相机内参,计算至少三个位于待测vin平面上的独立激光点或激光线和线之间交点在相机坐标系下的空间坐标;
12.s3、根据激光点的空间坐标获取待测平面在相机坐标系下的平面方程,以待测平面为平面,以平面法向量为轴正方向,建立待测平面空间坐标系,根据激光点与vin中心的位置关系,自定义新建空间坐标系的坐标原点;
13.s4、根据激光点在相机坐标系下的坐标和在待测平面空间坐标系坐标,计算从待测平面空间坐标系到相机坐标系的变换矩阵;
14.s5、确定复原区域范围及空间分辨率:复原区域的大小和vin的尺寸决定,复原区
域应该保证可以覆盖vin区域;空间分辨率的大小由复原图像的dpi决定,根据复原区域范围及空间分辨率确定复原图像的尺寸;
15.s6、对复原区域内的空间点以步骤s5确定的空间分辨率进行等比例采样,通过s4步骤中变换矩阵将vin平面上每个点坐标变换为相机坐标系下点坐标,通过s1步骤中的相机内参计算该点在原图片坐标系中的像素坐标;
16.s7、将复原图上像素点和复原空间点一一对应,复原图像素点取值为s6中对应原始拍摄图像中像素坐标进行双线性插值后的值;
17.进一步优化本技术方案,所述步骤s1中,标定相机内参矩阵:
[0018][0019]
进一步优化本技术方案,所述步骤s2中,公式为:
[0020]
其中。
[0021]
进一步优化本技术方案,所述步骤s4中,变换矩阵为:
[0022][0023]
进一步优化本技术方案,所述步骤s5中,dpi:dots per inch,图像每英寸长度内的像素点数。
[0024]
进一步优化本技术方案,所述步骤s6中,转换过程如公式;
[0025][0026]
进一步优化本技术方案,一种基于图像的vin字符识别方法,包括以下步骤:
[0027]
s1、获取复原后的vin图片;
[0028]
s2、使用分割网络psenet,检测vin字符区域,获取字符区域轮廓点,对字符区域进行粗定位;
[0029]
s3、基于步骤s2中字符区域轮廓,获取字符区域轮廓最小外接矩形,确定文字旋转角度,对vin图片进行旋转校正;
[0030]
s4、使用deeplabv3vin字符分割模型,对旋转后的vin图片,对字符进行分割提取;
[0031]
s5、提取分割图上每个字符的宽,高,像素点个数作为字符特征;
[0032]
s6、根据提取到的字符特征进行分析,获得文字区域的标准宽高信息,使用标准宽高信息对分割字符进行修正,得到vin字符识别结果;
[0033]
s7、提取修正后的字符,对字符区域进行精定位,从复原图上切分字符区域;
[0034]
s8、根据权利要求1中步骤s5中每个像素点对应空间分辨率s,对切分后的vin字符区域进行测量,得到vin的宽高尺寸信息。
[0035]
进一步优化本技术方案,所述vin:vehicle identification number,车架号。
[0036]
与现有技术相比,本发明提供了一种基于图像的vin等比例还原及字符识别方法,具备以下有益效果:
[0037]
该基于图像的vin等比例还原及字符识别方法,使用三维重建技术,使得车架号的复原简单易操作,提高了还原精度,使用基于深度学习的车架号检测和识别算法,增加了识别的稳定性和准确率,提高了操作效率。
附图说明
[0038]
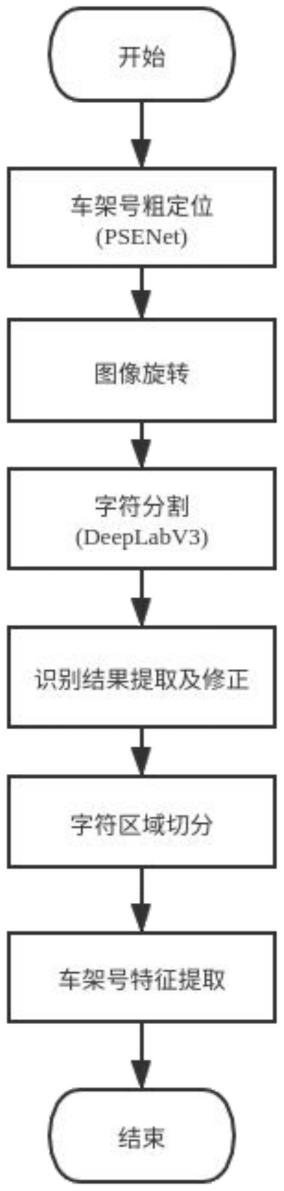
图1为本发明提出的一种基于图像的vin等比例还原及字符识别方法的流程示意图;
[0039]
图2为本发明提出的一种基于图像的vin等比例还原及字符识别方法的复原效果图;
[0040]
图3为本发明提出的一种基于图像的vin等比例还原及字符识别方法的定位效果图;
[0041]
图4为本发明提出的一种基于图像的vin等比例还原及字符识别方法的旋转效果图;
[0042]
图5为本发明提出的一种基于图像的vin等比例还原及字符识别方法的分割效果图;
[0043]
图6为本发明提出的一种基于图像的vin等比例还原及字符识别方法的车架号切分图。
具体实施方式
[0044]
下面将结合本发明的实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0045]
实施例:
[0046]
请参考图1所示,本发明公开了一种基于图像的vin等比例还原及字符识别方法,具体提出了一种vin图像1:1等比例复原方法以及一种基于图像的vin字符识别方法。
[0047]
针对一种vin图像1:1等比例复原方法,包含以下步骤:
[0048]
s1、使用图像采集装置获取10张以上棋盘格图片,标定相机内参矩阵
[0049][0050]
s2、拍摄包含平行激光发射器所发射的激光点或线的图片,提取激光点在图像中的坐标,通过激光发射接收器获取激光点到待测面的距离,通过步骤s1标定的相机内参,根据公式(1)计算至少三个位于待测车架号平面上的独立激光点或激光线和线之间交点在相机坐标系下的空间坐标,;
[0051][0052]
s3、根据激光点的空间坐标获取待测平面在相机坐标系下的平面方程,以待测平面为平面,以平面法向量为轴正方向,建立待测平面空间坐标系,根据激光点与车架号中心的位置关系,自定义新建空间坐标系的坐标原点;
[0053]
s4、根据激光点在相机坐标系下的坐标和在待测平面空间坐标系坐标,计算从待测平面空间坐标系到相机坐标系的变换矩阵:
[0054][0055]
s5、确定复原区域范围及空间分辨率:复原区域的大小和车架号的尺寸决定,复原区域应该保证可以覆盖车架号区域;空间分辨率的大小由复原图像的dpi决定,根据复原区域范围及空间分辨率确定复原图像的尺寸;
[0056]
s6、对复原区域内的空间点以步骤s5确定的空间分辨率进行等比例采样,通过s4步骤中变换矩阵将车架号平面上每个点坐标变换为相机坐标系下点坐标,通过s1步骤中的相机内参计算该点在原图片坐标系中的像素坐标,转换过程如公式(2);
[0057][0058]
s7、将复原图上像素点和复原空间点一一对应,复原图像素取值为s6中对应原始拍摄图像中像素坐标进行双线性插值后的值,复原效果图见附图2。
[0059]
针对一种基于图像的vin字符识别方法,包含以下步骤:
[0060]
s1、获取复原后的车架号图片;
[0061]
s2、使用分割网络psenet,检测车架号字符区域,获取字符区域轮廓点,对字符区域进行粗定位,定位效果图见附图3;
[0062]
s3、基于步骤s2中字符区域轮廓,获取字符区域轮廓最小外接矩形,确定文字旋转角度,对车架号图片进行旋转校正,旋转校正效果图见附图4;
[0063]
s4、使用deeplabv3车架号字符分割模型,对旋转后的车架号图片,对字符进行分割提取,分割后的效果图见附图5;
[0064]
s5、提取分割图上每个字符的宽,高,像素点个数作为字符特征;
[0065]
s6、根据提取到的字符特征进行分析,获得文字区域的标准宽高信息,使用标准宽高信息对分割字符进行修正,得到车架号字符识别结果;
[0066]
s7、提取修正后的字符,对字符区域进行精定位,从复原图上切分字符区域,车架号切分图见附图6;
[0067]
s8、根据发明内容一种vin图像1:1等比例复原方法s5中每个像素点对应空间分辨率s,对切分后的车架号字符区域进行测量,得到车架号的宽高尺寸信息。
[0068]
本发明的有益效果是:该基于图像的vin等比例还原及字符识别方法,使用三维重建技术,使得车架号的复原简单易操作,提高了还原精度,使用基于深度学习的车架号检测和识别算法,增加了识别的稳定性和准确率,提高了操作效率。
[0069]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1