矿井开采地表导通采空区裂隙识别方法及电子设备与流程
本发明涉及煤矿相关技术领域,特别是及矿井开采地表导通采空区裂隙识别方法电子设备。
背景技术:
目前,有运用高分辨率无人机遥感影像分析和统计了地表裂缝和塌陷盆地的分布特征,解译识别了塌陷坑和地表裂缝等采煤地面塌陷灾害,并运用msps软件对下沉值进行预计,得到了矿区的下沉等值线图,基于insar技术对采空区地表沉降进行了监测与分析,对三维激光扫描技术在沉陷监测中的应用问题进行了探讨绘制了裂缝分布图。
然而,现有技术没有一种可靠有效的手段用于矿井开采地表裂隙的识别并判断其是否导通采空区,现有的矿井开采地表导通采空区裂隙识别方法是通过地质雷达和瞬变电磁仪探测。地质雷达和瞬变电磁仪探测在施工和探测上具有局限性,耗费人力资源成本较大,其探测的结果精准度往往不高。尤其在矿区大范围区域探测地表裂缝是较为困难。
技术实现要素:
基于此,有必要针对现有技术没有一种可靠有效的手段用于矿井开采地表裂隙的识别并判断其是否导通采空区的技术问题,提供一种矿井开采地表导通采空区裂隙识别方法及电子设备。
本发明提供一种矿井开采地表导通采空区裂隙识别方法,包括:
获取无人机搭载热红外成像装置按照设计的航线、航高飞行所得到的地表的热红外图像;
采用边缘检测算法对所述热红外图像中的裂隙进行识别,并提取生成边缘检测图像;
提取热红外图像内的裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系;
根据裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系,判断裂隙是否导通采空区。
进一步地,所述提取热红外图像内的裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系,具体包括:
将热红外图像分为m×n个像素,每个像素的像素坐标为该像素在热红外图像中的所在行和所在列;
从热红外图像中提取每个像素的温度值,生成包含m×n个温度矩阵元素的温度矩阵,所述温度矩阵的每个温度矩阵元素为所述热红外图像中对应像素坐标的温度值;
确定边缘检测图像中的裂缝边缘在所述热红外图像中的像素坐标,保留温度矩阵中与裂缝边缘的像素坐标对应的温度矩阵元素,将其余温度计矩阵元素修改为0;
获取裂隙在所述热红外图像中每一像素行与竖直方向的夹角;
基于所述温度矩阵、以及裂隙在所述热红外图像中每一像素行与竖直方向的夹角,计算裂隙在所述热红外图像中每一像素行的温度、每一像素行的宽度和裂隙累计长度;
将裂隙每一像素行的温度、每一像素行的宽度和裂隙累计长度按照顺序进行拼接整合,得到裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系。
更进一步地,所述基于所述温度矩阵、以及裂隙在所述热红外图像中每一像素行与竖直方向的夹角,计算裂隙在所述热红外图像中每一像素行的温度、每一像素行的宽度和裂隙累计长度,具体包括:
计算裂隙在所述热红外图像中每一像素行的温度
计算裂隙在所述热红外图像中每一像素行的宽度
计算裂隙在所述热红图像中每一像素行的裂隙累计长度
更进一步地,所述获取裂隙在所述热红外图像中每一像素行与竖直方向的夹角,具体包括:
所述裂隙分为多段,获取所述裂隙每一分段在所述热红外图像中与竖直方向的夹角;
裂隙在所述热红外图像中每一像素行与竖直方向的夹角为该像素行所在分段与竖直方向的夹角。
更进一步地,所述基于所述温度矩阵、以及裂隙在所述热红外图像中每一像素行与竖直方向的夹角,计算裂隙在所述热红外图像中每一像素行的温度、每一像素行的宽度和裂隙累计长度之前,还包括:
统计温度矩阵中每一行非零温度矩阵元素数目并保存为包含m个数组元素的像素个数数组,所述像素个数数组中的每个数组元素为所述温度矩阵中与该数组元素对应的行的非零温度矩阵元素数目。
更进一步地,所述基于所述温度矩阵、以及裂隙在所述热红外图像中每一像素行与竖直方向的夹角,计算裂隙在所述热红外图像中每一像素行的温度、每一像素行的宽度和裂隙累计长度之前,还包括:
确定所述裂隙在所述热红外图像中所覆盖的像素行为裂隙像素行,将温度矩阵中除所述裂隙像素行以外的其他像素行所对应的温度矩阵元素删除;
确定裂隙起始端在所述热红外图像中的像素行为裂隙第一像素行;
将温度矩阵中裂隙像素行对应的温度矩阵元素的行号修正为:该温度矩阵元素的原行号减去所述裂隙第一像素行对应的温度矩阵元素的原行号后加一。
更进一步地,所述基于所述温度矩阵、以及裂隙在所述热红外图像中每一像素行与竖直方向的夹角,计算裂隙在所述热红外图像中每一像素行的温度、每一像素行的宽度和裂隙累计长度之前,还包括:
从所述热红外图像中确定尺寸参照物的像素,所述尺寸参照物预先布置在所述无人机所拍摄的地表上;
获取尺寸参照物的真实尺寸;
根据尺寸参照物的真实尺寸和尺寸参照物的像素,确定所述热红外图像的分辨率n。
进一步地,所述根据裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系,判断裂隙是否导通采空区,具体包括:
如果所述裂隙温度关于裂隙累计长度的关系与所述裂隙宽度关于裂隙累计长度的关系负相关,则判断裂隙导通采空区;
如果所述裂隙温度关于裂隙累计长度的关系与所述裂隙宽度关于裂隙累计长度的关系正相关,则判断裂隙未导通采空区。
进一步地:
所述获取无人机搭载热红外成像装置按照设计的航线、航高飞行所得到的地表的热红外图像,具体包括:获取无人机搭载热红外成像装置按照设计的航线、航高飞行在白天得到的地表的热红外图像和在凌晨得到的地表的热红外图像,将白天得到的地表的热红外图像作为白天热红外图像,将凌晨得到的地表的热红外图像作为凌晨热红外图像;
所述根据裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系,判断裂隙是否导通采空区,具体包括:
如果基于白天热红外图像计算得到的所述裂隙温度关于裂隙累计长度的关系与所述裂隙宽度关于裂隙累计长度的关系负相关,基于凌晨热红外图像计算得到的所述裂隙温度关于裂隙累计长度的关系与所述裂隙宽度关于裂隙累计长度的关系无相关性,则判断裂隙导通采空区;
如果基于凌晨热红外图像计算得到的所述裂隙温度关于裂隙累计长度的关系与所述裂隙宽度关于裂隙累计长度的关系正相关,且所述裂隙在白天得到的地表的热红外图像中未能识别到,在凌晨得到的地表的热红外图像中能识别到,则判断则判断裂隙未导通采空区。
本发明提供一种电子设备,包括:
至少一个处理器;以及,
与至少一个所述处理器通信连接的存储器;其中,
所述存储器存储有可被至少一个所述处理器执行的指令,所述指令被至少一个所述处理器执行,以使至少一个所述处理器能够执行如前所述的矿井开采地表导通采空区裂隙识别方法。
本发明基于无人机红外的矿井开采地表导通采空区裂隙识别方法,能无损地获取地表裂隙热红外图像,实现快速地识别地表裂隙,可以有效的判断矿井开采采空区上方地表裂隙是否导通。同时,通过高温环境和低温环境下地表裂隙的识别结果判断地表裂隙是否导通采空区,判据简单。该方法操作简便,工作量小,对矿井地表裂隙的快速识别和及时治理具有积极意义。
附图说明
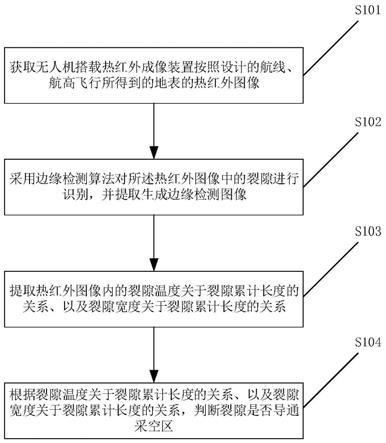
图1为本发明实施例一种矿井开采地表导通采空区裂隙识别方法的工作流程图;
图2为本发明最佳实施例一种基于无人机红外的矿井开采地表导通采空区裂隙识别方法的工作流程图;
图3为本发明一实施例无人机航线示意图;
图4为本发明一实施例可见光图像、热红外图像和边缘检测图像示意图;
图5a为裂隙1上午11:00的提取结果示意图;
图5b为裂隙1凌晨5:00的提取结果示意图;
图5c为裂隙2凌晨5:00的提取结果示意图;
图6为沙子(土壤)和植被的温度信息提取数据结果示意图;
图7为本发明一种电子设备的硬件结构示意图。
具体实施方式
下面结合附图和具体实施例对本发明做进一步详细的说明。
如图1所示为本发明实施例一种矿井开采地表导通采空区裂隙识别方法的工作流程图,包括:
步骤s101,获取无人机搭载热红外成像装置按照设计的航线、航高飞行所得到的地表的热红外图像;
步骤s102,采用边缘检测算法对所述热红外图像中的裂隙进行识别,并提取生成边缘检测图像;
步骤s103,提取热红外图像内的裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系;
步骤s104,根据裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系,判断裂隙是否导通采空区。
具体来说,使用无人机搭载热红外成像装置按照设计的航线、航高飞行,然后步骤s101获取地表热红外图像。然后执行步骤s102,使用边缘检测算法对热红外图像中的地表裂隙进行识别和提取。之后执行步骤s103,提取热红外图像内的温度信息和地表裂隙的宽度、长度,从而得到裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系。最后步骤s104根据裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系,判断地表裂隙是否导通采空区。
本发明基于无人机红外的矿井开采地表导通采空区裂隙识别方法,能无损地获取地表裂隙热红外图像,实现快速地识别地表裂隙,可以有效的判断矿井开采采空区上方地表裂隙是否导通。同时,通过高温环境和低温环境下地表裂隙的识别结果判断地表裂隙是否导通采空区,判据简单。该方法操作简便,工作量小,对矿井地表裂隙的快速识别和及时治理具有积极意义。
在其中一个实施例中,所述提取热红外图像内的裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系,具体包括:
将热红外图像分为m×n个像素,每个像素的像素坐标为该像素在热红外图像中的所在行和所在列;
从热红外图像中提取每个像素的温度值,生成包含m×n个温度矩阵元素的温度矩阵,所述温度矩阵的每个温度矩阵元素为所述热红外图像中对应像素坐标的温度值;
确定边缘检测图像中的裂缝边缘在所述热红外图像中的像素坐标,保留温度矩阵中与裂缝边缘的像素坐标对应的温度矩阵元素,将其余温度计矩阵元素修改为0;
获取裂隙在所述热红外图像中每一像素行与竖直方向的夹角;
基于所述温度矩阵、以及裂隙在所述热红外图像中每一像素行与竖直方向的夹角,计算裂隙在所述热红外图像中每一像素行的温度、每一像素行的宽度和裂隙累计长度;
将裂隙每一像素行的温度、每一像素行的宽度和裂隙累计长度按照顺序进行拼接整合,得到裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系。
具体来说,将热红外图像分为m×n个像素,每个像素的像素坐标为该像素在热红外图像中的所在行和所在列。
然后从热红外图像中提取每个像素的温度值,生成包含m×n个温度矩阵元素的温度矩阵,该温度矩阵中每个温度矩阵元素的行号和列号与热红外图像中的像素一一对应,从而将热红外图像中对应的像素坐标的温度值提取到温度矩阵中。
边缘检测图像为对热红外图像采用边缘检测算法识别后得到的灰度图像,因此边缘检测图像中每个像素与热红外图像中的每个像素一一对应,从而边缘检测图像中每个像素与温度居中每个温度矩阵元素一一对应。可以使用计算机人为擦除边缘检测图像中无关的非裂隙边缘,并将裂隙内部区域填充。可以通过maxlmdl5软件提取热红外图像温度信息,导出m×n的温度矩阵。然后将处理过的边缘检测图像和热红外图像的温度矩阵导入matlab软件,利用裂隙边缘所在的像素坐标进行定位,保留温度矩阵中对应裂隙位置的元素,将其余元素修改为0。最后获取裂隙在所述热红外图像中每一像素行与竖直方向的夹角,计算裂隙在所述热红外图像中每一像素行的温度、每一像素行的宽度和裂隙累计长度,并将裂隙每一像素行的温度、每一像素行的宽度和裂隙累计长度按照顺序进行拼接整合,得到裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系。
本实施例通过热红外图像和边缘检测图像的对应关系,确定裂隙在热红外图像中的各参数,从而得到裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系。
在其中一个实施例中,所述基于所述温度矩阵、以及裂隙在所述热红外图像中每一像素行与竖直方向的夹角,计算裂隙在所述热红外图像中每一像素行的温度、每一像素行的宽度和裂隙累计长度,具体包括:
计算裂隙在所述热红外图像中每一像素行的温度
计算裂隙在所述热红外图像中每一像素行的宽度
计算裂隙在所述热红图像中每一像素行的裂隙累计长度
本实施例中,ti、wi和li的计算公式能对裂隙任一位置对应的宽度、温度和沿着裂缝的位置坐标进行计算,且能实现三者对应,实现对裂缝温度和裂缝发育形态的量化表征。
在其中一个实施例中,所述获取裂隙在所述热红外图像中每一像素行与竖直方向的夹角,具体包括:
所述裂隙分为多段,获取所述裂隙每一分段在所述热红外图像中与竖直方向的夹角;
裂隙在所述热红外图像中每一像素行与竖直方向的夹角为该像素行所在分段与竖直方向的夹角。
本实施例将裂隙分为多段,从而将每段的夹角作为该分段所包括的像素行的夹角,从而简化计算,提高效率。
在其中一个实施例中,所述基于所述温度矩阵、以及裂隙在所述热红外图像中每一像素行与竖直方向的夹角,计算裂隙在所述热红外图像中每一像素行的温度、每一像素行的宽度和裂隙累计长度之前,还包括:
统计温度矩阵中每一行非零温度矩阵元素数目并保存为包含m个数组元素的像素个数数组,所述像素个数数组中的每个数组元素为所述温度矩阵中与该数组元素对应的行的非零温度矩阵元素数目。
本实施例通过设置像素个数数组,从而将温度矩阵中每一行非零温度矩阵元素数目提取出来,简化计算。
在其中一个实施例中,所述基于所述温度矩阵、以及裂隙在所述热红外图像中每一像素行与竖直方向的夹角,计算裂隙在所述热红外图像中每一像素行的温度、每一像素行的宽度和裂隙累计长度之前,还包括:
确定所述裂隙在所述热红外图像中所覆盖的像素行为裂隙像素行,将温度矩阵中除所述裂隙像素行以外的其他像素行所对应的温度矩阵元素删除;
确定裂隙起始端在所述热红外图像中的像素行为裂隙第一像素行;
将温度矩阵中裂隙像素行对应的温度矩阵元素的行号修正为:该温度矩阵元素的原行号减去所述裂隙第一像素行对应的温度矩阵元素的原行号后加一。
本实施例对温度矩阵进行修正,确定裂隙起始端和末端所在的坐标,使裂隙起始端处i=1,裂隙末端i=imax,从而简化计算,提高效率。
在其中一个实施例中,所述基于所述温度矩阵、以及裂隙在所述热红外图像中每一像素行与竖直方向的夹角,计算裂隙在所述热红外图像中每一像素行的温度、每一像素行的宽度和裂隙累计长度之前,还包括:
从所述热红外图像中确定尺寸参照物的像素,所述尺寸参照物预先布置在所述无人机所拍摄的地表上;
获取尺寸参照物的真实尺寸;
根据尺寸参照物的真实尺寸和尺寸参照物的像素,确定所述热红外图像的分辨率n。
本实施例采用尺寸参照物计算热红外图像的分辨率,从而得到准确的裂隙宽度和裂隙累计长度。
在其中一个实施例中,所述根据裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系,判断裂隙是否导通采空区,具体包括:
如果所述裂隙温度关于裂隙累计长度的关系与所述裂隙宽度关于裂隙累计长度的关系负相关,则判断裂隙导通采空区;
如果所述裂隙温度关于裂隙累计长度的关系与所述裂隙宽度关于裂隙累计长度的关系正相关,则判断裂隙未导通采空区。
具体来说,如果裂隙导通采空区,则对于裂隙某一累计长度,当对应的裂隙宽度增大时,由于裂隙导通采空区,使得空气向下流动,因此该裂隙累计长度所对应的裂隙温度降低,即所述裂隙温度关于裂隙累计长度的关系与所述裂隙宽度关于裂隙累计长度的关系负相关,从而可以判断裂隙导通采空区。而如果裂隙未导通采空区,则对于该裂隙累计长度,当裂隙宽度越大的位置,裂隙发育越深,内部的热量散发更多,从而使得该裂隙累计长度对应的裂隙温度上升,即所述裂隙温度关于裂隙累计长度的关系与所述裂隙宽度关于裂隙累计长度的关系正相关,从而判断裂隙未导通采空区。
本实施例的裂隙导通采空区判断方法,综合考虑到了裂隙宽度与裂隙温度的关系,从而有效地识别矿井开采地表裂隙是否导通采空区。
在其中一个实施例中:
所述获取无人机搭载热红外成像装置按照设计的航线、航高飞行所得到的地表的热红外图像,具体包括:获取无人机搭载热红外成像装置按照设计的航线、航高飞行在白天得到的地表的热红外图像和在凌晨得到的地表的热红外图像,将白天得到的地表的热红外图像作为白天热红外图像,将凌晨得到的地表的热红外图像作为凌晨热红外图像;
所述根据裂隙温度关于裂隙累计长度的关系、以及裂隙宽度关于裂隙累计长度的关系,判断裂隙是否导通采空区,具体包括:
如果基于白天热红外图像计算得到的所述裂隙温度关于裂隙累计长度的关系与所述裂隙宽度关于裂隙累计长度的关系负相关,基于凌晨热红外图像计算得到的所述裂隙温度关于裂隙累计长度的关系与所述裂隙宽度关于裂隙累计长度的关系无相关性,则判断裂隙导通采空区;
如果基于凌晨热红外图像计算得到的所述裂隙温度关于裂隙累计长度的关系与所述裂隙宽度关于裂隙累计长度的关系正相关,且所述裂隙在白天得到的地表的热红外图像中未能识别到,在凌晨得到的地表的热红外图像中能识别到,则判断则判断裂隙未导通采空区。
具体来说,所述无人机搭载热红外成像装置在白天正午时段和凌晨日出之前一日内气温最低时段按照如图3所示路径各飞行一次,从而得到两组地表热红外图像。根据白天和夜晚两种环境下的地表热红外图像和边缘检测结果,在白天、凌晨均能识别的地表裂隙导通了采空区,需进行重点关注和及时填埋治理,仅在凌晨外界温度较低的环境下被识别的裂隙未导通采空区。
本实施例增加对白天和凌晨的两次热红外图像,既弥补了未导通采空区的裂隙在白天气温较高时无法识别的漏洞,又能通过对比分辨裂隙是否导通采空区,从而评价裂隙的风险性大小,有利于及时治理有漏风威胁的裂隙,对避免采空区遗煤自燃发火具有积极意义。
如图2所示本发明最佳实施例一种基于无人机红外的矿井开采地表导通采空区裂隙识别方法,包括:
步骤s201,根据矿井和工作面位置确定监测范围、无人机航高、航向重叠度和航线。
具体的,实地调研矿井地理位置和工作面具体位置,确定矿井和工作面在地表的位置和边界,确定合适的监测范围、无人机航高和覆盖范围、航向重叠度,最终确定无人机航线;
步骤s202,使用无人机搭载热红外成像装置按照设计的航线、航高飞行,获取地表热红外图像。
无人机按照设计的航线、航高飞行,获取地表热红外图像。如图3所示,所述无人机航线优选为“弓字形”航线33,航线33覆盖矿井或工作面边界线31,并位于监测区域边界线32内。
具体的,所述矿井边界指矿井开采边界,为地表上对照井田边界煤柱内边缘的多条线段组成。所述工作面边界线由地表上对照采煤工作面切眼、运输顺槽、回风顺槽和工作面当前所在位置的四条线段所围成的长方形区域边界线。所述监测区域边界线为所述工作面边界线向切眼后方扩大100m,向运输顺槽、回风顺槽和工作面当前所在位置外侧各扩大50m所对应的长方形区域边界线。
具体的,在温度较高的白天和温度较低的凌晨分别进行航拍,获取白天和凌晨两种环境下的热红外图像。
步骤s203,使用边缘检测算法对热红外图像中的地表裂隙进行识别和提取。
具体的,所述边缘检测算法为基于元胞自动机的边缘检测算法。将热红外图像进行格式转换和图像预处理后,利用matlab软件对白天、夜晚两种环境的图像进行基于元胞自动机的边缘检测,不断调整阈值使裂隙提取完整并尽可能地滤除无关的非裂隙边缘。
步骤s204,提取热红外图像内的温度信息和地表裂隙的宽度、长度。
具体的,所述热红外图像的温度信息包括土壤温度、植被温度、裂隙温度。
具体的,土壤温度、植被温度的提取方法为:
将热红外图像导入maxlmdl5软件,在土壤区域、植被区域分别设置一定数量的测点,读取各测点所在像素的温度值,分别计算土壤区域、植被区域测点的温度平均值分别作为土壤温度、植被温度。
具体的,所述热红外图像的温度信息包括土壤温度、植被温度、裂隙温度,所述土壤温度为热红外图像内土壤区域一定量像素点温度的平均值,所述植被温度为植被区域一定量像素点温度的平均值;
具体的,本发明所述裂缝的温度、宽度、长度可分别表示为:
其中,i为自裂隙起始端开始统计的像素行数;numi为自裂隙起始端开始的第i行像素的个数;θ为裂隙与竖直方向的夹角,其随着裂隙的不同位置而变化,θi为自裂隙起始端开始的第i行像素与竖直方向的夹角;n为热红外图像的厘米分辨率,单位为pixel/cm;t(i,j)为自裂隙起始端开始第i行,自裂隙左边缘像素起第j个像素的温度值,单位为℃;ti为自裂隙起始端开始第i行的温度,单位为℃;wi为自裂隙起始端开始第i行的宽度,单位为cm;li为自裂隙起始端开始至第i行位置的累计长度,单位为m。累计长度为从裂隙起始端开始到第i行的裂隙累计长度,由于i为自裂隙起始端开始统计的像素行数,因此,统计可以直接从裂隙起始端的第1行开始,统计到第i行。同时,由于累计长度单位为米(m),而分辨率n的单位为像素/厘米(pixel/cm),因此乘以100以调整单位。
具体的,所述裂缝的温度、长度、宽度提取步骤:
第一步,根据热红外图像和尺寸参照物确定图像的分辨率n和像素行数m、列数n。
第二步,使用计算机人为地擦除边缘检测图像中无关的非裂隙边缘,并将裂隙内部区域填充;
第三步,通过maxlmdl5软件提取热红外图像温度信息,导出m×n的温度矩阵;
第四步,将处理过的边缘检测图像和热红外图像的温度矩阵导入matlab软件,利用裂隙边缘所在的像素坐标进行定位,保留温度矩阵中对应裂隙位置的元素,将其余元素修改为0;
第五步,使用matlab软件统计温度矩阵中每一行非零元素数目并保存为m个元素组成的一维数组,一维数组内num的第i个元素numi对应温度矩阵第i行的非零元素数目;
第六步,结合maxlmdl5软件对matlab处理后的温度矩阵和一维数组num进行修正,确定裂隙起始端和末端所在的坐标,使裂隙起始端处i=1,裂隙末端i=imax,确定imax的值和裂隙各像素点的温度t(i,j),imax为裂隙在热红外图像中所覆盖的总行数;
第七步,分段测量裂隙与热红外图像纵向的锐角夹角,将裂隙各分段的分割点的记为i1、i2、i3,…ik,各分段夹角记为θ’1-i1,θ’i1-i2,…θ’ik-imax;
第八步,当1≤i≤i1,θ1=θ2=…=θi1=θ’1-i1,根据t(i,j)和numi,按照ti,wi,li的公式计算出裂隙第一分段各像素行的温度、宽度和累计长度;
当i1<i≤i2,θi1+1=θi1+2=…=θi2=θ’i1-i2,根据t(i,j)和numi,按照ti,wi,li的公式计算出裂隙第二分段各像素行的温度、宽度和累计长度;
…
当ik<i≤imax,θik+1=θik+2=…=θimax=θ’ik-imax,根据t(i,j)和numi,按照ti,wi,li的公式计算出裂隙第k+1分段各像素行的温度、宽度和累计长度;
第十步,将裂隙各分段的温度、宽度和累计长度按照顺序进行拼接整合。
步骤s204,判断地表裂隙是否导通采空区。
具体的,根据白天和夜晚两种环境下的热红外图像和边缘检测结果,在白天、凌晨均能识别的地表裂隙导通采空区,仅在凌晨外界温度较低的环境下被识别的裂隙未导通采空区。
(1)使用无人机搭载热红外成像装置按照预设的航线飞行,获取地表热红外图像,自动化程度高。
(2)使用边缘检测算法对热红外图像中的裂缝进行识别和提取,分析热红外图像的温度信息和裂缝的宽度、长度,判断裂隙是否导通采空区可以快速高效分辨矿区裂缝,操作简单,工作效率高。
作为一个例子,使用无人机搭载热红外成像装置在西部某矿地表进行了裂隙的监测,在上午11:00和凌晨5:00分别进行了拍摄。对上午11:00和凌晨5:00两个时刻的热红外图像分别进行了边缘检测。第一步,根据热红外图像和尺寸参照物确定图像的分辨率,第二步,使用计算机人为地擦除边缘检测图像中无关的非裂隙边缘,并将裂隙内部区域填充,再通过maxlmdl5软件提取热红外图像温度信息,导出m×n的第四步,将处理过的边缘检测图像和热红外图像的温度矩阵导入matlab软件,利用裂隙边缘所在的像素坐标进行定位,保留温度矩阵中对应裂隙位置的元素,最后得出地表裂隙如图4所示的可见光图像41、11:00的热红外图像42、5:00的热红外图43、11:00的边缘检测图44、以及5:00的边缘检测图45。裂隙的温度、宽度和长度的提取结果如图5a-5c所示,其中图5a为裂隙1上午11:00的提取结果,图5b为裂隙1凌晨5:00的提取结果,图5c为裂隙2凌晨5:00的提取结果。沙子(土壤)和植被的温度信息提取数据结果如图6。
根据上述结果,裂隙1在上午11:00和凌晨5:00均能识别,为导通采空区的地表裂隙。上午11:00,裂隙宽度大的位置,温度较低。而在凌晨5:00,裂隙的温度随宽度变化不明显;裂隙2仅在凌晨5:00能识别,且裂隙宽度较大的位置,温度较高,裂隙2未导通采空区。
如图7所示为本发明一种电子设备的硬件结构示意图,包括:
至少一个处理器701;以及,
与至少一个所述处理器701通信连接的存储器702;其中,
所述存储器702存储有可被至少一个所述处理器执行的指令,所述指令被至少一个所述处理器执行,以使至少一个所述处理器能够执行如前所述的矿井开采地表导通采空区裂隙识别方法。
图7中以一个处理器701为例。
电子设备还可以包括:输入装置703和显示装置704。
处理器701、存储器702、输入装置703及显示装置704可以通过总线或者其他方式连接,图中以通过总线连接为例。
存储器702作为一种非易失性计算机可读存储介质,可用于存储非易失性软件程序、非易失性计算机可执行程序以及模块,如本申请实施例中的矿井开采地表导通采空区裂隙识别方法对应的程序指令/模块,例如,图1所示的方法流程。处理器701通过运行存储在存储器702中的非易失性软件程序、指令以及模块,从而执行各种功能应用以及数据处理,即实现上述实施例中的矿井开采地表导通采空区裂隙识别方法。
存储器702可以包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需要的应用程序;存储数据区可存储根据矿井开采地表导通采空区裂隙识别方法的使用所创建的数据等。此外,存储器702可以包括高速随机存取存储器,还可以包括非易失性存储器,例如至少一个磁盘存储器件、闪存器件、或其他非易失性固态存储器件。在一些实施例中,存储器702可选包括相对于处理器701远程设置的存储器,这些远程存储器可以通过网络连接至执行矿井开采地表导通采空区裂隙识别方法的装置。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
输入装置703可接收输入的用户点击,以及产生与矿井开采地表导通采空区裂隙识别方法的用户设置以及功能控制有关的信号输入。显示装置704可包括显示屏等显示设备。
在所述一个或者多个模块存储在所述存储器702中,当被所述一个或者多个处理器701运行时,执行上述任意方法实施例中的矿井开采地表导通采空区裂隙识别方法。
本发明基于无人机红外的矿井开采地表导通采空区裂隙识别方法,能无损地获取地表裂隙热红外图像,实现快速地识别地表裂隙,可以有效的判断矿井开采采空区上方地表裂隙是否导通。同时,通过高温环境和低温环境下地表裂隙的识别结果判断地表裂隙是否导通采空区,判据简单。该方法操作简便,工作量小,对矿井地表裂隙的快速识别和及时治理具有积极意义。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 还没有人留言评论。精彩留言会获得点赞!