被配置用于眩光检测和控制机动窗帘的可见光传感器的制作方法
被配置用于眩光检测和控制机动窗帘的可见光传感器
1.本技术是国家申请号为201880024941.5(国际申请号pct/us2018/020775,国际申请日2018年3月2日,发明名称“被配置用于眩光检测和控制机动窗帘的可见光传感器”)之申请的分案申请。
2.相关申请的交叉引用
3.本技术要求2017年3月3日提交的美国临时专利申请no.62/466,696的优先权,该临时专利申请通过引用整体并入本文。
技术领域
4.本发明涉及可见光传感器,特别涉及用于眩光检测和控制机动窗帘的可见光传感器。
背景技术:
5.可以使用各种类型的负载控制系统来配置用户环境,例如住宅或办公楼。照明控制系统可用于控制在用户环境中提供人造光的照明负载。机动窗帘控制系统可用于控制提供给用户环境的自然光。hvac系统可用于控制用户环境中的温度。
6.每个负载控制系统可以包括各种控制设备,包括输入设备和负载控制设备。负载控制设备可以接收数字消息,该数字消息可以包括负载控制指令,用于控制来自一个或多个输入设备的电负载。负载控制设备可以能够直接控制电负载。输入设备可以能够通过负载控制设备间接控制电负载。
7.负载控制设备的示例可包括照明控制设备(例如,调光器开关、电子开关、镇流器或发光二极管(led)驱动器)、机动窗帘、温度控制设备(例如,恒温器)和/或ac插入式负载控制设备等。输入设备的示例可以包括遥控设备、占用传感器、日光传感器、眩光传感器、色温传感器和/或温度传感器等。遥控设备可以接收用于执行负载控制的用户输入。占用传感器可以包括红外(ir)传感器,用于基于用户的移动来检测空间的占用/空置。日光传感器可以检测空间内接收的日光水平。色温传感器基于光的波长和/或频率确定用户环境内的色温。温度传感器可以检测空间的当前温度。窗口传感器(例如,眩光传感器)可以面向建筑物的外部(例如,在建筑物的窗口或外部)定位,以测量在建筑物外部检测到的自然光的总量和/或检测眩光状况。
8.一些现有技术的负载控制系统已经控制机动窗帘以防止建筑物内部的眩光状况(例如,由直射阳光照射到建筑物中引起的眩光状况)。负载控制系统可以包括系统控制器,用于确定控制机动窗帘的遮挡织物所至的位置以基于预测的太阳位置防止眩光状况(例如,使用当天和当年的当前时间、建筑物的位置和/或方向等)。负载控制系统可以根据估计的太阳位置在一天中自动控制机动窗帘。负载控制系统还可以包括窗口传感器,其被配置为检测低光条件(例如,在阴天)和/或高光条件(例如,在极亮的天),以使系统控制器能够超驰在阴天和晴天的机动窗帘的自动控制。然而,这种负载控制系统需要复杂的配置过程和先进的系统控制器来适当地操作。这些系统还基于已知条件(例如,当天和当年的当前时
间、建筑物的位置和/或方向等)和/或在给定的传感器的位置处感测到的日光总量来执行日光眩光的估计。在2012年10月16日授权的共同转让的美国专利no.8,288,981中描述了这种负载控制系统的示例,该专利题为“method of automatically controlling a motorized window treatment while minimizing occupant distractions(在最小化占用者注意力分散的同时自动控制机动窗帘的方法)”,该专利的全部公开内容通过引用并入于此。
技术实现要素:
9.传感器(例如,可见光传感器)和/或系统控制器可以处理图像以确定眩光源的位置,并控制机动窗帘以防止眩光源影响房间的占用者。传感器(例如,可见光传感器)和/或系统控制器可以处理图像的像素以确定是否存在眩光状况。传感器和/或系统控制器可以开始处理在图像的一部分处(例如,图像的底部或顶部)的像素。传感器和/或系统控制器可以开始处理在图像中像素的底部或顶部行的像素,并将像素的亮度与一个或多个阈值进行比较,以确定是否有眩光状况(例如,绝对眩光状况和/或相对眩光状况)。传感器和/或系统控制器可以在确定存在眩光状况之后停止处理图像,这可以简化和/或加速图像的处理以识别眩光状况。
10.在确定存在眩光状况之后,传感器和/或系统控制器可以确定眩光源的轮廓角。传感器和/或系统控制器可以使用轮廓角来识别在一个或多个机动窗帘处可以控制遮挡水平所至的位置,以防止眩光状况影响房间的占用者。
11.如本文所述,用于检测眩光的传感器可包括:可见光感测电路,被配置为记录一个或多个图像;以及,控制电路,被配置为计算图像(例如,非扭曲的图像)的多个像素的相应亮度,并且响应于至少一个像素的亮度检测眩光状况。在计算多个像素中的每个像素的相应亮度的同时,控制电路可以被配置为在非扭曲的图像的底行像素上的第一像素处开始并且在步进直到紧接在底行上方的下一行像素之前逐步通过底行上的多个像素中的每一个。当控制电路检测到眩光状况时,控制电路可以通过不计算非扭曲的图像的每个剩余像素的相应亮度来停止处理非扭曲的图像。
12.另外,控制电路可以被配置为通过下述方式来计算图像的背景亮度:将图像的像素从最暗到最亮重新排序,并且计算作为从最暗像素到最亮像素的距离的预定百分比的像素的亮度。如果特定像素的亮度与背景亮度的比率大于预定的对比阈值,则控制电路可以被配置为检测眩光状况。尽管传感器可被描述为执行用于检测眩光状况以控制机动窗帘的遮挡水平的图像处理,但是系统控制器或另一图像处理设备可执行类似的功能。
附图说明
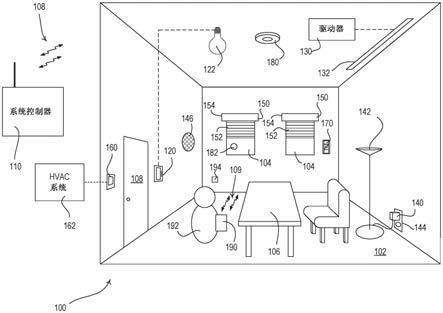
13.图1是具有可见光传感器的示例负载控制系统的简图。
14.图2是具有可见光传感器的示例空间的侧视图。
15.图3是示例可见光传感器的简化框图。
16.图4示出了示例眩光检测过程的流程图。
17.图5a和5b示出了可以由可见光传感器的控制电路执行的示例眩光检测过程的流程图。
18.图6示出了用于确定背景亮度的简化过程的流程图。
19.图7a示出了可以由可见光传感器和机动窗帘执行的示例眩光检测过程的简化序列图。
20.图7b示出了可以由可见光传感器、系统控制器和机动窗帘执行的示例眩光检测过程的简化序列图。
21.图8是用于眩光检测的非扭曲的图像的简化示例。
22.图9是示例系统控制器的框图。
23.图10是示例控制目标设备的框图。
具体实施方式
24.图1是用于控制从交流(ac)电源(未示出)传递到一个或多个电负载的功率量的示例负载控制系统100的简图。负载控制系统100可以安装在建筑物的房间102中。负载控制系统100可以包括多个控制设备,其被配置为经由无线信号(例如,射频(rf)信号108)彼此通信。可选地或另外地,负载控制系统100可以包括耦合到一个或多个控制设备以提供负载控制设备之间的通信的有线数字通信链路。负载控制系统100的控制设备可以包括多个控制源设备(例如,可操作以响应于用户输入,占用/空置条件、测量的光强度的变化等而发送数字消息的输入设备)和多个控制目标设备(例如,可操作以接收数字消息并响应于所接收的数字消息控制相应的电负载的负载控制设备)。负载控制系统100的单个控制设备可以作为控制源和控制目标设备操作。
25.控制源设备可以被配置为将数字消息直接发送到控制目标设备。此外,负载控制系统100可以包括系统控制器110(例如,中央处理器或负载控制器),其可操作以将数字消息传送到控制设备例如,控制源设备和/或控制目标设备)和从控制设备传送数字消息。例如,系统控制器110可以被配置为从控制源设备接收数字消息,并响应于从控制源设备接收的数字消息将数字消息发送到控制目标设备。控制源和控制目标设备和系统控制器110可以被配置为使用专有rf协议(例如协议)发送和接收rf信号108。或者,可以使用不同的rf协议传输rf信号108,不同的rf协议例如是标准协议,例如wifi、zigbee、z
‑
wave、knx
‑
rf、enocean radio协议或不同的专有协议之一。
26.负载控制系统100可以包括一个或多个负载控制设备,例如用于控制照明负载122的调光器开关120。调光器开关120可以适于壁挂在标准电壁箱中。调光器开关120可包括桌面或插入式负载控制设备。调光器开关120可包括切换致动器(例如,按钮)和强度调节致动器(例如,摇臂开关)。切换致动器的致动(例如,连续致动)可以切换(例如,关闭和打开)照明负载122。强度调节致动器的上部或下部的致动可以分别增加或减少输送到照明负载122的功率量,因此从最小强度(例如,大约1%)到最大强度(例如,大约100%)增加或减小接收照明负载的强度。调光器开关120可以包括多个视觉指示器,例如发光二极管(led),其可以布置成线性阵列并被照亮以提供照明负载122的强度的反馈。在下文中更详细地描述了壁挂式调光器开关的示例:在1993年9月28日授权的题为lighting control device(照明控制设备)的美国专利no.5,248,919和在2017年6月13日授权的题为wireless load control device(无线负载控制设备)的美国专利no.5,676,696,其全部公开内容通过引用并入在此。
27.调光器开关120可以被配置为经由rf信号108(例如,从系统控制器110)无线地接收数字消息,并且响应于所接收的数字消息来控制照明负载122。在下文中更详细地描述了可操作以发送和接收数字消息的调光器开关的示例:在2009年8月20日公布的题为“communication protocol for a radio
‑
frequency load control system(用于射频负载控制系统的通信协议)”的共同转让的美国专利申请公开no.2009/0206983中,其整个公开内容在此引入作为参考。
28.负载控制系统100可以包括一个或多个远程定位的负载控制设备,例如用于驱动led光源132(例如,led光引擎)的发光二极管(led)驱动器130。led驱动器130可以远程地定位,例如,位于led光源132的照明器材中或附近。led驱动器130可以被配置为经由rf信号108(例如,从系统控制器110)接收数字消息,并响应于接收的数字消息控制led光源132。led驱动器130可以被配置为响应于接收的数字消息调节led光源132的色温。在下文中更详细地描述了被配置为控制led光源的色温的led驱动器的示例:在2017年1月3日授权的题为“systems and methods for controlling color temperature(用于控制色温的系统和方法)”的共同转让的美国专利no.9,538,603,其全部公开内容通过引用并入在此。负载控制系统100还可以包括其他类型的远程定位的负载控制设备,例如用于驱动荧光灯的电子调光镇流器。
29.负载控制系统100可包括用于控制插入式电负载的插入式负载控制设备140,插入式电负载例如是插入式照明负载(例如,落地灯142或台灯)和/或电器(例如电视或计算机监控器)。例如,落地灯142可以插入插入式负载控制设备140。插入式负载控制设备140可以插入标准电源插座144,因此可以串联耦合在ac电源和插入式照明负载之间。插入式负载控制设备140可以被配置为经由rf信号108(例如,从系统控制器110)接收数字消息,并且响应于接收到的数字消息,打开和关闭或调节落地灯142的强度。
30.可选地或另外地,负载控制系统100可包括可控插座,用于控制插入插座中的插入式电负载。负载控制系统100可以包括能够直接从系统控制器110接收无线信号108的一个或多个负载控制设备或电器,例如扬声器146(例如,音频/视频或对讲系统的一部分),它能够产生声音,如闹钟、音乐、对讲功能等。
31.负载控制系统100可包括一个或多个日光控制设备,例如机动窗帘150,诸如机动蜂窝状遮阳帘,用于控制进入房间102的日光量。每个机动窗帘150可包括从相应的窗口104之前的窗帘盒154悬挂的窗帘织物152。每个机动窗帘150还可包括位于窗帘盒154内部的电机驱动单元(未示出),用于升高和降低窗帘织物152以控制进入房间102的日光量。机动窗帘150的电机驱动单元可以被配置为通过rf信号108(例如,从系统控制器110)接收数字消息,并响应于接收到的数字信息对于相应的窗帘织物152的位置进行调节。负载控制系统100可以包括其他类型的日光控制设备,例如,蜂窝状遮阳帘、帷幔、罗马帘、百叶帘、波斯窗帘、褶皱百叶窗帘、张紧卷帘系统、电致变色或智能窗口和/或其他合适的日光控制设备。在下文中更详细地描述了电池供电的机动窗帘的示例:在2015年2月10日授权的题为“motorized window treatment(机动窗帘)”的美国专利no.8,950,461和2016年11月8日授权的题为“integrated accessible battery compartment for motorized window treatment(用于机动窗帘的集成的可触及电池室)”的美国专利no.9,488,000,其全部公开内容通过引用并入在此。
32.负载控制系统100可包括一个或多个温度控制设备,例如,用于控制房间102中的室温的恒温器160。恒温器160可通过控制链路(例如,模拟控制链路或有线数字通信链路)耦合到加热、通风和空调(hvac)系统162。恒温器160可以被配置为与hvac系统162的控制器无线地传送数字消息。恒温器160可以包括用于测量房间102的室温的温度传感器,并且可以控制hvac系统162以将房间中的温度调节到设定点温度。负载控制系统100可包括位于房间102中的一个或多个无线温度传感器(未示出),用于测量室温。hvac系统162可以被配置为响应于从恒温器160接收的控制信号,打开和关闭压缩机以冷却房间102并且打开和关闭加热源以加热房间。hvac系统162可以被配置为响应于从恒温器160接收的控制信号打开和关闭hvac系统的风扇。恒温器160和/或hvac系统162可以被配置为控制一个或多个可控阻尼器以控制在房间102中的空气流动。恒温器160可以被配置为经由rf信号108(例如,从系统控制器110)接收数字消息,并且响应于所接收的数字消息调节加热、通风和冷却。
33.负载控制系统100可以包括一个或多个其他类型的负载控制设备,例如包括:调光器电路和白炽灯或卤素灯的旋入式灯具;包括镇流器和紧凑型荧光灯的旋入式灯具;包括led驱动器和led光源的旋入式灯具;电子开关、可控断路器或其他用于开启和关闭电器的开关设备;插入式负载控制设备、可控电插座或可控电源板,用于控制一个或多个插入式负载;电机控制单元,用于控制电机负载,例如吊扇或排气扇;用于控制机动窗帘或投影屏幕的驱动单元;机动的内部或外部百叶窗;用于加热和/或冷却系统的恒温器;温度控制设备,用于控制hvac系统的设定点温度;空调;压缩机;电基板加热器控制器;可控阻尼器;可变风量控制器;新鲜空气进气控制器;通风控制器;用于散热器和辐射加热系统的液压阀;湿度控制单元;加湿器;除湿器;热水器;锅炉控制器;泳池泵;冰箱;冰柜;电视或计算机监控器;摄像机;音频系统或放大器;电梯;电源;发电机;充电器,诸如机动车充电器;以及,替代的能量控制器。
34.负载控制系统100可包括一个或多个输入设备,例如遥控设备170、第一可见光传感器180(例如,房间传感器)和第二可见光传感器182(例如,窗口传感器)。输入设备可以是固定的或可移动的输入设备。系统控制器110可以被配置为响应于从遥控设备170和可见光传感器180、182接收的数字消息,将一个或多个数字消息发送到负载控制设备(例如,调光器开关120、led驱动器130、插入式负载控制设备140、机动窗帘150和/或恒温器160)。遥控设备170和可见光传感器180、182可以被配置为将数字消息直接发送到调光器开关120、led驱动器130、插入式负载控制设备140、机动窗帘150和温度控制设备160。
35.遥控设备170可以被配置为响应于遥控设备的一个或多个按钮的致动,经由rf信号108将数字消息发送到系统控制器110(例如,直接发送到系统控制器)。例如,遥控设备170可以是电池供电的。负载控制系统100可以包括其他类型的输入设备,例如温度传感器、湿度传感器、辐射计、阴天传感器、遮挡传感器、压力传感器、烟雾探测器、一氧化碳探测器、空气质量传感器、运动传感器、安全传感器、接近传感器、夹具传感器、分区传感器、键盘、多区域控制单元、滑块控制单元、动能或太阳能遥控器、钥匙扣、蜂窝电话、智能电话、平板计算机、个人数字助理、个人计算机、笔记本计算机、时间锁、视听控制、安全设备、电力监控设备(如电表、能量表、公用设施费用表、公用设施费率计等)、中央控制变送器、住宅、商业或工业控制器和/或其任何组合。
36.系统控制器110可以耦合到诸如无线或有线局域网(lan)的网络以例如用于访问
location of an occupant and mobile devices(响应于占用者和移动设备的位置的负载控制系统)”的共同转让的美国专利申请公开no.2016/0056629,其全部公开内容通过引用并入于此。
39.可见光传感器180、182可各自包括例如照相机和鱼眼镜头。第一可见光传感器180的相机可以被引导到房间102中并且可以被配置为记录房间102的图像。例如,第一可见光传感器180可以安装到房间102的天花板上(如图1所示),并且/或者可以安装在房间的墙壁上。如果第一可见光传感器180安装到天花板,则由相机记录的图像可以是房间102的俯视图。第二可见光传感器182的相机可以被引导到房间102的外部(例如,窗口104外面)并且可以被配置为记录来自建筑物外部的图像。例如,第二可见光传感器182可以安装到窗口104中的一个(如图1所示),并且/或者可以安装到建筑物的外部。
40.可见光传感器180、182每个可以被配置为处理由相机记录的图像,并且响应于处理的图像将一个或多个消息(例如,数字消息)发送到负载控制设备。每个可见光传感器180、182可以被配置为从图像感测空间(例如,房间102和/或房间200)的一个或多个环境特征。例如,第一可见光传感器180可以被配置为以一种或多种传感器模式(例如,占用和/或空置传感器模式、日光传感器模式、颜色传感器模式、眩光检测传感器模式、占用者计数模式等)操作。此外,第二可见光传感器182可以被配置为在一个或多个相同或不同的传感器模式下(例如,颜色传感器模式、眩光检测传感器模式、天气传感器模式等)操作。每个可见光传感器180、182可以执行不同的算法以处理每个传感器模式中的图像,以确定要传输到负载控制设备的数据。可见光传感器180、182每个都可以响应于图像经由rf信号108(例如,使用专有协议)发送数字消息。可见光传感器180、182可以各自将数字消息直接发送到负载控制设备和/或系统控制器110,其然后可以将消息传送到负载控制设备。每个可见光传感器180、182可以包括第一通信电路,用于使用专有协议发送和接收rf信号108。
41.可见光传感器180、182每个可以被配置为执行多个传感器事件以感测房间102的内部和/或外部的各种环境特征。例如,为了执行传感器事件,每个可见光传感器180、182可以被配置为在多个传感器模式之一中操作以执行一个或多个相应的算法以感测环境特征。另外,每个可见光传感器180、182可以被配置为从存储器获得可以由算法用于在传感器事件期间感测环境的特征的某些预先配置的操作特征(例如,灵敏度、基线值、阈值、极限值等)。
42.此外,每个可见光传感器180、182可以被配置为在处理图像时聚焦在由相机记录的图像中的一个或多个感兴趣的区域上,以在传感器事件期间感测环境特征。例如,由可见光传感器180、182中的一个的相机记录的图像的某些区域可以被掩蔽(例如,数字掩蔽),使得相应的可见光传感器可以不处理在被掩蔽区域中的图像的部分。每个可见光传感器180、182可以被配置为应用掩模(例如,可以存储在存储器中的预定数字掩模)以聚焦在特定感兴趣的区域上,并处理感兴趣的区域中的图像部分。另外,每个可见光传感器180、182可以被配置为同时聚焦在图像中的多个感兴趣的区域上。可以为每个传感器事件定义一个或多个特定掩模。
43.可见光传感器180、182每个可以被配置为在传感器模式之间动态地改变,将数字掩模应用于图像和/或根据当前传感器事件调节操作特征。每个可见光传感器180、182可以被配置为执行多个不同的传感器事件以感测空间的多个环境特征。例如,每个可见光传感
occupancy sensor(电池供电的占用传感器)”的美国专利no.8,228,184,其全部公开内容通过引用并入在此。
48.第一可见光传感器180还可以被配置为在日光传感器模式下操作以测量空间位置处的光强度。例如,第一可见光传感器180可以应用数字掩模以仅聚焦在空间中(例如,在工作表面上,例如图1中所示的桌子106)的特定位置,并且可以使用日光算法以测量该位置的光强度。例如,第一可见光传感器180可以被配置为应用掩模以聚焦在包括桌面的感兴趣的区域上。第一可见光传感器180可以被配置为整合在感兴趣的区域上的图像的像素的光强度值,以确定在桌面处的测量的光强度。
49.第一可见光传感器180可以经由rf信号108将数字消息(例如,包括测量的光强度)发送到系统控制器110,以响应于测量的光强度控制照明负载122和/或led光源132的强度。第一可见光传感器180可以被配置为聚焦在由相机记录的图像中的多个感兴趣的区域上,并测量每个不同感兴趣的区域中的光强度。或者,第一可见光传感器180可以将数字消息直接发送到照明负载。第一可见光传感器180可以被配置为基于其中当前正在测量光强度的感兴趣的区域来调节某些操作特征(例如,增益)。在下文中更详细描述了具有日光传感器的rf负载控制系统的示例:在2013年4月2日授权的题为“method of calibrating a daylight sensor(校正日光传感器的方法)”的共同转让的美国专利no.8,410,706;以及,在2013年5月28日授权的、题为“wireless battery
‑
powered daylight sensor(无线电池供电的日光传感器)”的美国专利no.8,451,116,其全部公开内容通过引用被并入在此。
50.系统控制器110可以被配置为确定空间中的一个或多个照明负载(例如,照明负载122和/或led光源132)的光输出的劣化,并控制照明负载的强度以补偿劣化(例如,流明保持)。例如,系统控制器110可以被配置为单独地打开每个照明负载(例如,当它在夜间是黑暗时)并且测量在位置处(例如,在桌子106或书桌220上)的光强度的大小。例如,系统控制器110可以被配置为在夜间打开照明负载122并控制第一可见光传感器180以记录房间的图像,以应用掩模以聚焦在照明负载122照亮的感兴趣的区域上(例如,桌子106或书桌220的表面),以测量该感兴趣的区域中的光强度,并将该值传送给系统控制器110。系统控制器110可将该值存储为基线值。在此后的时间和/或日期,系统控制器110可以重复测量并将测量结果与基线值进行比较。如果系统控制器110确定存在劣化,则其可以控制照明负载122以补偿劣化、警报维护等。
51.第一可见光传感器180还可以被配置为在颜色传感器模式下操作以感测由空间中的一个或多个照明负载发射的光的颜色(例如,测量色温)(例如,以作为颜色传感器和/或色温传感器操作)。例如,第一可见光传感器180可以被配置为应用掩模以聚焦在房间102中的感兴趣的区域上,并且可以使用颜色感测算法来确定房间中的测量颜色和/或色温。例如,第一可见光传感器180可以整合感兴趣的区域上的图像的像素的颜色值,以确定房间中的测量的颜色和/或色温。第一可见光传感器180可以经由rf信号108将数字消息(例如,包括测量的色温)发送到系统控制器110,以响应于测量的光强度(例如,空间中的光的颜色调谐)控制照明负载122和/或led光源132的颜色(例如,色温)。或者,第一可见光传感器180可以将数字消息直接发送到照明负载。在下文中更详细地描述了用于控制一个或多个照明负载的色温的负载控制系统的示例:在2017年1月3日授权的题为“systems and methods for controlling color temperature(用于控制色温的系统和方法)”的共同转让的美国专利
no.9,538,603,其全部公开内容通过引用被并入在此。
52.第一可见光传感器180可以被配置为以眩光检测传感器模式操作。例如,第一可见光传感器180可以被配置为执行眩光检测算法,以确定直射阳光从相机记录的图像穿透到空间中的深度。例如,第一可见光传感器180可以被配置为应用掩模以聚焦在窗口104附近的房间102的地板上的感兴趣的区域上,以感测直射阳光穿透到房间中的深度。基于直射阳光穿透到房间中的深度的检测和/或测量,第一可见光传感器180可以经由rf信号108将数字消息发送到系统控制器110,以限制直射阳光穿透到空间中的深度,例如以用于防止直射阳光照射在表面(例如桌子或书桌)上。系统控制器110可以被配置为降低每个机动窗帘150的窗帘织物152,以防止直射阳光穿透的深度超过最大阳光穿透深度。或者,第一可见光传感器180可以被配置为直接控制窗帘150到窗帘织物152的下部。在先前引用的美国专利no.8,288,981中更详细地描述了用于限制空间中的阳光穿透深度的方法的示例。
53.第一可见光传感器180可以被配置为仅聚焦在通过例如窗口104中的一个或两个进入空间的日光(以例如用作窗口传感器)。系统控制器110可以被配置为响应于进入空间的日光的大小来控制照明负载(例如,照明负载122和/或led光源132)。系统控制器110可以被配置为例如响应于确定是阴天或非常晴天而超驰机动窗帘150的自动控制。或者,第一可见光传感器180可以被配置为直接控制窗帘150到窗帘织物152的下部。在下文中更详细地描述了具有窗口传感器的负荷控制系统的示例:在2014年6月5日公布的、题为“method of controlling a motorized window treatment控制机动窗帘的方法)”的共同转让的美国专利申请公开no.2014/0156079,其全部公开内容通过引用并入于此。
54.第一可见光传感器180可以被配置为响应于由相机记录的图像来检测房间102外部或内部的眩光源(例如,从表面反射的太阳光)。系统控制器110可以被配置为降低每个机动窗帘150的窗帘织物152以消除眩光源。或者,第一可见光传感器180可以被配置为直接控制窗帘150到窗帘织物152的下部以消除眩光源。
55.第一可见光传感器180还可以被配置为在占用者计数模式下操作并且可以执行占用者计数算法以计算特定感兴趣的区域的占用者的数量和/或进入和/或离开感兴趣的区域的占用者的数量。例如,系统控制器110可以被配置为响应于空间中的占用者的数量来控制hvac系统162。系统控制器110可以被配置为响应于空间中的占用者的数量超过占用数量阈值来控制负载控制系统100的一个或多个负载控制设备。或者,第一可见光传感器180可以被配置为直接控制hvac系统162和其他负载控制设备。
56.第二可见光传感器182可以被配置为以眩光检测传感器模式操作。例如,第二可见光传感器182可以被配置为执行眩光检测算法,以根据相机记录的一个或多个图像确定房间102中是否可能存在眩光状况。房间102中的眩光状况可以由房间外的眩光源产生,眩光源例如为太阳、外部灯(例如,室外建筑物灯或路灯)和/或太阳或其他明亮光源的反射。第二可见光传感器182可以被配置为分析由相机记录的一个或多个图像,以确定从窗口104中的一个观察时是否在房间102外部存在绝对眩光状况和/或存在相对眩光状况。当潜在眩光源的光水平(例如,光强度)太高(例如,超过绝对眩光阈值)时,可能发生绝对眩光状况。当潜在眩光源的光水平与背景光水平(例如,基线)之间的差异太高(例如,超过相对眩光阈值)时,可能发生相对眩光状况(例如,对比眩光状况)。
57.基于眩光状况的检测,第二可见光传感器182可以经由rf信号108将数字消息发送
到系统控制器110,以打开、关闭或调节每个机动窗帘150的窗帘织物152的位置。例如,系统控制器110可以被配置为降低每个机动窗帘150的窗帘织物152,以防止直射阳光穿透到房间102中的工作表面(例如,书桌或桌子)。如果第二可见光传感器182没有检测到眩光状况,则系统控制器110可以被配置为打开机动窗帘150(例如,以将窗帘织物152的位置控制到完全打开位置或者遮阳板位置)。或者,第二可见光传感器182可以被配置为直接控制窗帘150。
58.可以使用例如移动设备190或其他网络设备(例如,当移动设备是个人计算设备时)来编程和配置负载控制系统100的操作。移动设备190可以执行图形用户界面(gui)配置软件,以允许用户编程负载控制系统100将如何操作。例如,配置软件可以作为pc应用或web界面运行。配置软件和/或系统控制器110(例如,通过来自配置软件的指令)可以生成定义负载控制系统100的操作的负载控制数据库。例如,负载控制数据库可以包括关于负载控制系统的不同负载控制设备(例如,调光器开关120、led驱动器130、插入式负载控制设备140、机动窗帘150和/或恒温器160)的操作设置的信息。负载控制数据库可以包括关于负载控制设备和输入设备(例如,遥控设备170、可见光传感器180等)之间的关联的信息。负载控制数据库可以包括关于负载控制设备如何响应从输入设备接收的输入的信息。在下文中更详细描述用于负载控制系统的配置过程的示例:在2008年6月24日授权的、题为“handheld programmer for a lighting control system(用于照明控制系统的手持编程器)”的共同转让的美国专利no.7,391,297;在2008年4月17日公布的题为“method of building a database of a lighting control system(建立照明控制系统的数据库的方法)”的美国专利申请公开no.2008/0092075;以及,在2014年9月18日公布的题为“commissioning load control systems(调试负载控制系统)”的美国专利申请公开no.2014/0265568,其全部公开内容通过引用并入于此。
59.可以使用移动设备190或其他网络设备对可见光传感器180、182的操作进行编程和配置。每个可见光传感器180、182可以包括第二通信电路,用于发送和接收rf信号109(例如,使用诸如wi
‑
fi或蓝牙的标准协议直接与网络设备190)。在负载控制系统100的配置过程期间,可见光传感器180、182每个可以被配置为记录空间的图像并将图像发送到网络设备190(例如,使用标准协议经由rf信号109直接发送到网络设备)。网络设备190可以在视觉显示器上显示图像,并且用户可以配置每个可见光传感器180、182的操作以设置可见光传感器的一个或多个配置参数(例如,配置信息)。例如,对于由可见光传感器180、182感测和控制的不同环境特征(例如,占用者移动、房间内的光水平、房间外的日光水平),用户可以通过下述方式指示图像上的不同的感兴趣的区域:跟踪(例如用手指或手写笔)在可视显示器上显示的图像上的遮挡区域。可见光传感器180、182每个可以被配置为根据要感测的环境特征(例如,占用者移动、房间内的光水平、房间外的日光水平、色温等)建立不同的掩模和/或操作特征。
60.在网络设备190处完成可见光传感器180、182的配置之后,网络设备可以将配置信息发送到可见光传感器(例如,使用标准协议经由rf信号109直接发送到可见光传感器)。可见光传感器180、182可各自将配置信息存储在存储器中,使得可见光传感器可在正常操作期间适当地操作。例如,对于可见光传感器180、182将要监视的每个传感器事件,网络设备190可以向相应的可见光传感器传输事件的传感器模式、定义事件的感兴趣的区域的一个
或多个掩模、可能用于感测事件的环境特征的算法的指示以及事件的一个或多个操作特征。
61.虽然上面已经参考两个可见光传感器180、182描述了图1的负载控制系统100,但是负载控制系统100也可以简单地包括可见光传感器180、182中的任一个。例如,负载控制系统100可以不包括第一可见光传感器180并且可以仅包括第二可见光传感器182,第二可见光传感器182可以安装到窗口104并且可以操作以防止在房间102中的工作表面上发生太阳眩光。此外,负载控制系统100可以具有超过两个的可见光传感器。每个窗口可以具有相应的可见光传感器,或者可见光传感器可以通过窗口接收图像,该窗口代表具有基于单个可见光传感器的图像共同控制的机动窗帘的一组窗口。
62.图2是具有可见光传感器210(例如,图1中所示的负载控制系统100的第二可见光传感器182)的示例空间200的简化侧视图。可见光传感器210可以安装到窗口202,窗口202可以位于建筑物的立面204中,空间200位于该立面中,并且可以允许光(例如,阳光)进入该空间。可见光传感器210可以安装到窗口202的内表面(例如,如图2所示)或窗口202的外表面。窗口202的特征可以在于窗口底部的高度h
win
‑
bot
和窗口顶部的高度h
win
‑
top
。空间200还可以包括工作表面,例如桌子206,其可以具有高度h
work
并且可以位于距窗口202的距离d
work
处。
63.诸如机动卷帘220的机动窗帘可以安装在窗口202上。机动卷帘220可以包括卷管222,遮挡织物224可以围绕卷管222缠绕。遮挡织物224可以在遮挡织物的下边缘处具有卷边226,其可以在地板上方的高度h
hembar
。机动卷帘220可以包括电机驱动单元(未示出),该电机驱动单元可以被配置为旋转卷管222以使遮挡织物224在完全打开位置p
open
(例如,在此,窗口202未被覆盖,卷边226可以位于窗口的顶部)和完全关闭的位置p
closed
(例如,在此,窗口202被完全覆盖并且卷边226可以位于窗口的底部)之间移动。此外,电机驱动单元可以将遮挡织物222的位置控制到完全打开位置和完全关闭位置之间的多个预设位置中的一个。
64.房间200的占用者的眩光状况可以由诸如太阳的眩光源、外部灯(例如,室外建筑物灯或路灯)或太阳或可以位于窗口202之外的其他明亮光源的反射引起。例如,来自眩光源的光可以通过窗口202照射到房间200中并且可以延伸到房间中(例如,到地板上)达到距窗口202和/或距立面204的穿透距离d
pen
。可以在垂直于窗口202的方向上和/或从立面204测量光的穿透距离d
pen
。来自眩光源的光的穿透距离d
pen
可以是机动卷帘220的卷边226的高度h
hembar
和眩光源的轮廓角θ
p
的函数。轮廓角θ
p
可以表示眩光源在窗口202外部的位置。眩光源的位置可以由距可见光传感器210的视图中心(例如,垂直于窗口202和/或立面204的方向)的高度角(例如,垂直角)和方位角(例如,水平角)来定义。轮廓角θ
p
可以被定义为从眩光源到可见光传感器的线向垂直于窗口202和/或立面204的垂直平面上的投影的角度。可以通过下述方式确定自眩光源的光到空间200的地板上的穿透距离d
pen
(例如,在垂直于窗口202和/或立面204的方向上):考虑由穿透距离d
pen
、卷边226的高度h
hembar
以及在窗口202的法线方向上照射到空间200中的光的长度l形成的三角形,如图2中的窗口202的侧视图中所示,例如
65.tan(θp)=h
hembar
/d
pen
ꢀꢀ
(等式1)
66.响应于可见光传感器210检测到在窗口202外部的眩光源,可见光传感器210和/或
系统控制器(例如,系统控制器110)可以被配置为确定将机动卷帘220的遮挡织物224(例如,遮挡织物224的卷边226)控制到以防止空间中的眩光状况的位置。例如,可以调节机动卷帘220的卷边226的位置,以防止穿透距离d
pen
超过最大穿透距离d
pen
‑
max
。例如,如果太阳在窗口220中照射,则可见光传感器210可以被配置为处理图像以确定定义眩光源的位置的轮廓角θ
s
。可见光传感器210和/或系统控制器可以被配置为计算将卷边226控制到的地板上方的期望高度h
hembar
,以防止来自眩光源的光超过最大穿透距离d
pen
‑
max
,例如,
67.h
hembar
=tan(θp)
·
d
pen
‑
max
ꢀꢀ
(等式2)
68.可见光传感器210和/或系统控制器可以例如在可见光传感器和/或系统控制器的配置期间配置有窗口220的顶部和底部高度h
win
‑
top
、h
win
‑
bot
的值。可见光传感器210和/或系统控制器可以被配置为使用顶部和底部高度h
win
‑
top
、h
win
‑
bot
和计算的卷边的高度h
hembar
确定在机动卷帘220的完全打开位置p
open
和完全关闭位置p
closed
之间的卷边226的期望位置。
69.另外,可以调节机动卷帘220的卷边226的位置以防止来自眩光源的光照射在桌子206上。例如,可见光传感器210和/或系统控制器可以被配置为计算将卷边226控制到的以防止来自眩光源的光照射在桌子206上的地板上方的所需高度h
hembar
,例如,
70.h
hembar
=(tan(θp)
·
d
work
)+h
work
ꢀꢀ
(等式3)
71.可以调节机动卷帘220的卷边226的位置,以防止来自眩光源的光照射在空间200的占用者的眼睛中。例如,可见光传感器210和/或系统控制器可以被配置为基于占用者眼睛的估计高度和/或占用者距窗口的估计距离来计算将卷边226控制到的地板上方的期望高度h
hembar
。例如,如果房间200包括位于房间内的可见光传感器(例如,作为图1的负载控制系统100的可见光传感器180),则该可见光传感器可以被配置为处理房间的图像以确定占用者眼睛的高度和/或占用者距窗口的距离的值。
72.可见光传感器210和/或系统控制器可存储最大穿透距离d
pen
‑
max
、桌子206的高度h
work
以及桌子206距窗口202的距离d
work
的值。例如,在可见光传感器210和/或系统控制器的配置期间(例如,使用移动设备190或其他网络设备),可见光传感器210和/或系统控制器可以配置有这些值。附加地或替代地,可见光传感器206和/或系统控制器可以配置有最大穿透距离d
pen
‑
max
、桌子206的高度h
work
以及桌子206距窗口202的距离d
work
的默认值。例如,如果房间200包括位于房间内的可见光传感器(例如,作为图1的负载控制系统100的可见光传感器180),则该可见光传感器可以被配置为处理房间图像以用于确定最大穿透距离d
pen
‑
max
、桌子206的高度h
work
以及桌子206距窗口202的距离d
work
的值,并将这些值传送到窗口202上的可见光传感器210和/或系统控制器。
73.图3是示例可见光传感器300的简化框图,其可以被部署为图1中所示的负载控制系统100的可见光传感器180、182中的一个或两个和/或图2的可见光传感器210。可见光传感器300可包括控制电路310,例如微处理器、可编程逻辑器件(pld)、微控制器、专用集成电路(asic)、现场可编程门阵列(fpga)或任何合适的处理设备。控制电路310可以耦合到存储器312,用于存储可见光传感器300的传感器事件、掩模、操作特征等。存储器312可以实现为外部集成电路(ic)或控制电路310的内部电路。
74.可见光传感器300可以包括可见光感测电路320,其具有:图像记录电路,例如相机322;以及,图像处理电路,例如处理器324。图像处理器324可以包括数字信号处理器(dsp)、微处理器、可编程逻辑器件(pld)、微控制器、专用集成电路(asic)、现场可编程门阵列
(fpga)或任何合适的处理设备。相机322可以朝向空间中定位,在该空间中,要在空间中(例如,进入房间102)感测一个或多个环境特征。相机322可以被配置为捕获或记录图像。例如,相机322可以被配置为以特定采样率捕获图像,其中,单个图像可以被称为帧采集。一个示例帧采集速率大约是每秒十帧。可以限制帧采集速率以降低可见光传感器所需的处理能力。每个图像可以由像素阵列组成,其中,每个像素具有与其相关联的一个或多个值。原始rgb图像可以具有针对每个像素的三个值:分别针对红色、绿色和蓝色强度中的每一个有一个值。一种实现可以将现有rgb系统用于像素颜色,其中,强度的每个分量具有0
‑
255的值。例如,红色像素的rgb值为(255,0,0),而蓝色像素的rgb值为(0,0,255)。被检测为红色、绿色和/或蓝色的组合的任何给定像素可以是(0
‑
255,0
‑
255,0
‑
255)的某种组合。人们将认识到可以使用图像的过度表示。
75.相机322可以将捕获的图像(例如,原始图像)提供给图像处理器324。图像处理器324可以被配置为处理图像并向控制电路310提供代表感测的环境特征(例如,移动的发生、移动的量、移动方向、移动速度、计数的占用者数量、光强度、光色、直射阳光穿透量等)的一个或多个感测信号。例如,提供给控制电路310的一个或多个感测信号可以表示空间中的移动和/或空间中的测量光水平。
76.另外,图像处理器324可以将原始图像或处理的(例如,预处理的)图像提供给控制电路310,控制电路310可以被配置为处理图像以确定感测的环境特征。无论如何,控制电路310然后可以使用所感测的环境特征来将控制命令发送到加载设备(例如,直接地或通过系统控制器110)。
77.如本领域中已知的,处理的图像的一个示例是像素的亮度,其可以通过相加r、g、b强度值从图像rgb测量,根据以下公式加权:
78.亮度(感知的)=(0.299*r+0.587*g+0.114*b)(公式4)示例加权系数可以考虑人眼对不同波长的光的非均匀响应。然而,可替代地使用其他系数。
79.如前所述,如果可见光传感器300具有鱼眼镜头,则由相机322拍摄的图像可能会扭曲。图像处理器324可以被配置为对图像进行预处理以使图像去扭曲并生成非扭曲的图像。
80.另一种图像处理技术可以包括将rgb传感器响应映射到cie三刺激值以获取色度坐标,从而获得相关色温(cct)。joe smith于2009年2月27日在intelligent opto sensor designer's notebook中描述了一种示例方法:calculating color temperature and illuminance using the taos tcs3414cs digital color sensor。处理后的图像的另一个示例可能是已将数字滤波器或数字掩模应用到的图像。可以使用数字掩模来消除图像内的区域,这些区域可能没有用于进一步分析和处理的值。或者,数字掩模的补码可以是感兴趣的区域(例如,已经被识别用于进一步处理或分析的图像内的区域)。还可以通过称为背景减法的技术来创建经处理的图像。例如,使用背景减法,可以从当前图像(例如,房间的当前状态)中减去可以并入图像随时间的历史的背景图像(例如,房间的先前状态)。该技术可以识别图像中的差异。背景减法可用于检测图像中的移动以及用于占用和空置检测。各种算法可以用于背景维护,以确定如何有效地将随时间的像素组合到背景图像中。一些示例背景维护算法可以包括:调节的帧差异、均值和阈值、均值和协方差、高斯混合和归一化块相关。图像处理固有的这些和其他类似细节对于本领域技术人员来说是熟悉的。
81.控制电路310和/或图像处理器324可以被配置为应用一个或多个掩模以聚焦在图像(例如,原始图像和/或预处理图像)中的一个或多个感兴趣的区域以感测空间的一个或多个环境特征。如这里所使用的,掩模可以是定义图像的感兴趣的区域的任何定义。例如,假设图像可以被定义为nxm像素阵列,其中,每个像素在阵列中具有限定的坐标/位置,掩模被定义为像素坐标序列,其定义了在该图像内的感兴趣的区域的外周长。作为另一示例,掩模可以被定义为nxm阵列,其对应于图像的nxm像素阵列。例如,掩模的每个条目可以是1或0,由此具有1的条目可以定义感兴趣的区域。这样的表示可以允许图像阵列和掩模阵列“被与”,其可以取消或归零图像中不感兴趣的所有像素。作为另一替代方案,掩模可以定义不感兴趣的区域,而不是掩模定义图像的感兴趣的区域。这些仅仅是示例,可以使用其他表示。
82.可见光传感器300可以包括第一通信电路330,其被配置为使用第一协议经由第一通信链路发送和接收数字消息。例如,第一通信链路可以包括无线通信链路,第一通信电路330可以包括耦合到天线的rf收发器。另外,第一通信链路可以包括有线数字通信链路,第一通信电路330可以包括有线通信电路。第一协议可以包括专有协议,例如clearconnect协议。控制电路310可以被配置为在可见光传感器300的正常操作期间经由第一通信链路发送和接收数字消息。控制电路310可以被配置为在可见光传感器300的正常操作期间经由第一通信链路发送感测的环境特征的指示。例如,控制电路310可以被配置为在可见光传感器300的正常操作期间经由第一通信链路发送检测到的状态(例如,占用或空置状况)和/或测量的环境特征(例如,测量的光水平)的指示。
83.可见光传感器300可以包括第二通信电路332,其被配置为使用第二协议经由第二通信链路发送和接收数字消息。例如,第二通信链路可以包括无线通信链路,第二通信电路332可以包括耦合到天线的rf收发器。另外,第二通信链路可以包括有线数字通信链路,第二通信电路332可以包括有线通信电路。第二协议可以包括标准协议,例如,wi
‑
fi协议、蓝牙协议、zigbee协议等。控制电路310可以被配置为在可见光传感器300的配置期间经由第二通信链路发送和接收数字消息。例如,控制电路310可以被配置为在可见光传感器300的配置期间经由第二通信链路发送由相机322记录的图像。
84.可见光传感器300可以包括电源340,用于产生dc电源电压vcc,用于为控制电路310、存储器312、图像处理器324、第一和第二通信电路330、332以及可见光传感器300的其他低压电路供电。电源340可以包括电源供应,该电源供应被配置为从外部电源(例如,ac电源线电压电源和/或外部dc电源)接收外部电源电压。另外,电源340可以包括用于为可见光传感器300的电路供电的电池。
85.可见光传感器300还可以包括低功率占用感测电路,例如无源红外(pir)检测器电路350。pir检测器电路350可以响应于在空间中检测到的无源红外能量产生pir检测信号v
pir
(例如,低功率占用信号),其表示在空间中的占用和/或空置状况。pir检测器电路350可以比可见光感测电路320消耗更少的功率。然而,可见光感测电路320可以比pir检测器电路350更精确。例如,当电源340是电池时,控制电路310可以被配置为禁用可见光感测电路320并使用pir检测器电路350来检测占用状况。控制电路310可以例如在空间空置时禁用光感测电路320。控制电路310可以响应于pir检测信号v
pir
检测空间中的占用状况,并且可以随后使可见光感测电路320能够检测持续占用状况和/或空置状况。控制电路310可以在响应
于pir检测信号v
pir
检测到空间中的占用状况之后立即启用可见光感测电路320。在检测到空间中的占用状况(响应于pir检测信号v
pir
)之后,控制电路310还可以保持可见光感测电路320被禁用。控制电路310可以保持可见光感测电路320被禁用,直到pir检测信号v
pir
指示空间是空置的。在可见光感测电路320随后指示空间是空置的之前,控制电路310可能不确定空间是空置的。
86.当可见光传感器300被安装到窗口(例如,作为图1的负载控制系统的第二可见光传感器182)时,控制电路310可以被配置为经由相机322记录在窗外的空间的一个或多个图像,并处理一个或多个图像以确定是否存在眩光状况。可见光传感器300可以包括鱼眼镜头(未示出),其可以使由相机322记录的图像扭曲。控制电路310和/或图像处理器324可以被配置为使由相机322记录的图像去扭曲以产生非扭曲的图像,其可以由恒定轮廓角的行来表征。
87.控制电路310可以被配置为处理非扭曲的图像的每个像素以确定对于每个像素是否存在眩光状况。控制电路310可以开始在相对于从中拍摄图像的窗口或窗口组的位置的图像的一部分处处理图像。例如,图像的该部分可以表示窗口的底部,并且控制电路可以开始在底部处理非扭曲的图像。底部可包括距图像底部的预定数量的像素行(例如,非扭曲的图像中的底行像素)。控制电路还可以或替代地从图像的顶部(例如,顶行像素)开始处理图像。首先处理的图像部分可以取决于机动窗帘移动覆盖材料以关闭覆盖材料和/或覆盖材料的当前位置的方向,以减少用于识别在图像中的眩光状况的处理资源。
88.控制电路310可以被配置为从非扭曲的图像的底行像素(例如,在左侧或右侧)开始。控制电路310可以逐步通过底行中的每个像素并处理每个像素以确定在向前移动到下一行之前是否存在眩光状况。在控制电路310确定存在眩光状况之后,控制电路310可以停止处理非扭曲的图像并且可以操作以控制一个或多个机动窗帘(例如,图1的机动窗帘140和/或图2的机动卷帘220)以去除眩光状况(例如,如下面将更详细描述的)。这可以防止处理图像的其余部分以检测眩光状况。如果控制电路310在未检测眩光状况的情况下处理整个图像,则控制电路可以断定不存在眩光状况并且可以控制机动窗帘打开。由于控制电路310处理在非扭曲的图像的底行处开始的非扭曲的图像的像素,所以控制电路310可以在检测到其他更高眩光源之前找到指示眩光源的最低像素。指示眩光源的最低像素是用于确定将机动窗帘控制到的以防止工作表面上的眩光的遮挡位置的重要参数。这允许控制电路310最小化用于确定遮挡控制命令以防止房间中的眩光所需的处理量。
89.当处理非扭曲的图像以确定是否存在眩光状况时,控制电路310可以被配置为确定是否存在绝对眩光状况和/或是否存在相对眩光状况(例如,对比眩光状况)。控制电路310可以被配置为如果像素的绝对光水平(例如,绝对强度)超过绝对眩光阈值(例如,大约10,000cd/m2),则确定存在绝对眩光状况。控制电路310可以被配置为如果与背景光水平相比较的相对光水平(例如,像素的绝对光水平和背景光水平之间的差异)超过相对眩光阈值(例如,约4,000cd/m2)则确定存在相对眩光状况。如果控制电路310检测到存在绝对眩光状况或存在相对眩光状况,则控制电路可以停止处理非扭曲的图像并移动以控制一个或多个机动窗帘以消除眩光状况。例如,一个或多个机动窗帘可以通过基于眩光状况的位置确定遮挡位置来消除眩光状况。阈值可以是可调节的,以调节可见光传感器300的灵敏度。例如,阈值可以由用户在可见光传感器300的配置期间调节。
90.为了确定是否存在相对眩光状况,控制电路310可以从非扭曲的图像(例如,基线)确定背景光水平。背景光水平可以是表示非扭曲的图像的背景的亮度的值。例如,背景光水平可以是非扭曲的图像的百分位亮度(例如,第25百分位亮度:25th percentile luminance)。第25百分位亮度可以是亮度,其中,非扭曲的图像的25%的像素比第25百分位亮度更暗。
91.当控制电路310已经确定存在眩光状况时,控制电路310可以处理像素以确定眩光源的轮廓角。例如,图像的每个像素可以由轮廓角的值表征。轮廓角的值可以存储在存储器312中。控制电路310可以基于处理的像素检索适当的轮廓角。另外,可以根据图像的数据确定和/或计算轮廓角。控制电路310可以使用轮廓角确定将机动窗帘控制到的位置(例如,如上面的等式2和/或3所示)。另外,控制电路310可以将轮廓角传输到另一个设备(例如,系统控制器110),其可以确定将机动窗帘控制到的以避免房间中的眩光状况的位置。
92.图4是示例眩光检测过程400的简化流程图。可以在410处由可见光传感器的控制电路(例如,可见光传感器300的控制电路310)周期性地执行眩光检测过程400。在412处,控制电路可以检索图像(例如,非扭曲的图像)。例如,控制电路可以记录一个或多个图像并处理图像以产生非扭曲的图像。附加地或替代地,控制电路可以在412处从存储器检索一个或多个图像(例如,非扭曲的图像)。在414处,控制电路可以开始处理图像的一部分。例如,控制电路可以开始处理图像的底部部分(例如,图像中的底行像素)。在416处,控制电路可以处理图像的像素以确定是否存在眩光状况(例如,绝对眩光状况和/或相对眩光状况)。如果控制电路未在418处确定存在眩光状况且控制电路未在420处处理当前图像,则控制电路可在422处移动到下一像素,然后在416处处理下一像素以确定是否存在眩光状况。如果控制电路在418处确定存在眩光状况,则控制电路可以在424处处理当前像素以允许在过程400退出之前控制机动窗帘以防止眩光状况。例如,控制电路可以在424处确定图像中眩光源的轮廓角和/或确定将机动窗帘控制到的以防止眩光状况的位置。控制电路如果控制电路在420处完成处理图像之前没有检测到眩光状况,则过程400可以退出。尽管可以将图像处理描述为在可见光传感器处执行,但是可以在负载控制系统中的系统控制器或另一图像处理设备处执行图像处理。
93.图5a示出了在510处由可见光传感器的控制电路(例如,可见光传感器200的控制电路210)周期性执行的示例眩光检测过程500的流程图。在512处,控制电路可以检索图像。例如,图像可以包括高动态范围(hdr)图像,其可以是由被可见光传感器的相机记录的多个低动态范围(ldr)图像(例如,六个ldr图像)合成。在514处,控制电路可以使检索到的图像去扭曲(例如,如果可见光传感器具有鱼眼镜头)以产生非扭曲的图像。例如,为了产生非扭曲的图像,控制电路可以从扭曲的图像产生恒定轮廓角的行。在516处,控制电路可以确定非扭曲的图像的背景亮度。例如,控制电路可以计算百分位亮度(例如,第25百分位亮度l
25
),其可以是表示非扭曲的图像的背景(例如,基线)的亮度的值。
94.在518处,控制电路可以确定非扭曲的图像(来自514)的第i像素的亮度l
pi
。例如,控制电路可以在第一次执行518时在非扭曲的图像的底行上的像素之一处(例如,在底行的左侧或右侧)开始。如果检索的图像是hdr图像,则控制电路可以在518处从hdr图像的数据中检索第i像素的亮度l
pi
。控制电路还可以在518处计算第i像素的亮度l
pi
(例如,使用上面示出的等式4)。
95.如果在520处计算的亮度l
pi
大于高亮度阈值l
th
‑
hi
(例如,大约10,000cd/m2),则控制电路可以在522处确定存在眩光状况(例如,绝对眩光状况)。在524处,控制电路可以使用来自非扭曲的图像的第i像素的行来确定第i像素的轮廓角a
pi
(例如,表示眩光源的近似位置)。例如,控制电路可以从存储器调用第i像素的轮廓角a
pi
和/或可以使用第i像素和/或图像的其他像素的数据来计算轮廓角a
pi
。
96.在526处,控制电路可基于轮廓角a
pi
确定用于防止来自眩光源的光超过最大穿透距离和/或防止工作表面上的眩光的遮挡位置(例如,使用如上所示的等式2和/或等式3)。用于防止来自眩光源的光超过最大穿透距离和/或用于防止工作表面上的眩光的遮挡位置还可以取决于最大穿透距离、工作表面的高度和/或工作表面距窗口的距离,其可以存储在存储器中。在528处,控制电路可以发送遮挡控制命令,其用于将在空间中的机动窗帘的位置控制到用于防止工作表面上的眩光的确定的遮挡位置(例如,直接地或经由系统控制器110),然后眩光检测过程500退出。或者,控制电路可以被配置为将轮廓角a
pi
发送到系统控制器110,系统控制器110可以确定用于防止工作表面上的眩光的遮挡位置,并且将遮挡控制命令发送到机动窗帘。尽管可以将图像处理描述为在可见光传感器处执行,但是可以在负载控制系统中的系统控制器或另一图像处理设备处执行图像处理。
97.如果在520处计算的亮度l
pi
不大于高亮度阈值l
th
‑
hi
,则控制电路可以被配置为确定计算的亮度l
pi
是否小于低亮度阈值l
th
‑
lo
(例如,大约4,000cd/m2)。如果在530处计算的亮度l
pi
小于低亮度阈值l
th
‑
lo
,则控制电路可以决定不处理非扭曲的图像的第i像素。如果控制电路未在532处处理非扭曲的图像的像素,则控制电路可在534处移动到下一像素(例如,i=i+1),并且可在518处计算非扭曲的图像的下一像素的亮度l
pi
。如前所述,控制电路可以从非扭曲的图像的底行上的像素之一处开始(例如,在底行的左侧或右侧)。当控制电路在534处移动到下一个像素时,控制电路可以移动到当前像素行中的与前一像素相邻的像素(例如,移动到前一像素的左或右)。当控制电路计算出一行中每个像素的亮度时,控制电路可以向前移动到下一行像素。以这种方式,控制电路可以通过从底行开始并向前移动通过图像的行来逐步通过非扭曲的图像中的多个像素。
98.如果在530处计算的亮度l
pi
不小于低亮度阈值l
th
‑
lo
,则控制电路可以在536处基于计算的亮度l
pi
和第25百分位亮度l
25
计算对比度c
pi
(例如,c
pi
=l
pi
/l
25
)。如果对比度c
pi
在538处大于对比阈值c
th
(例如,大约15),则控制电路可以在522处确定存在眩光状况(例如,相对眩光状况)。然后,控制电路可以在524处计算第i像素的轮廓角a
pi
,在526处基于轮廓角a
pi
确定用于防止工作表面上的眩光的遮挡位置,并且在528处发送用于控制机动窗帘在空间中的位置的遮挡控制命令,然后眩光检测过程500退出。或者,控制电路可以在538处使用所计算的第i像素的亮度l
pi
和相邻像素的亮度(例如,相邻像素的最低亮度)以在536处计算对比度c
pi
。例如,相邻像素可以是具有从第i像素起的特定数量的像素的那些像素(例如,从第i像素起的5个像素内的所有像素)。
99.当控制电路在532处完成处理非扭曲的图像的像素而不确定存在眩光状况时,控制电路可以在540处确定不存在眩光状况并且可以在528处发送用于控制机动窗帘的位置的遮挡控制命令,然后眩光检测过程500退出。例如,如果不存在眩光状况,则控制电路可以发送用于打开机动窗帘(例如,到完全打开位置或遮阳板位置)的遮挡命令。
100.图5b示出了在560处由可见光传感器的控制电路(例如,可见光传感器200的控制
电路210)周期性执行的另一示例眩光检测过程550的流程图。在562处,控制电路可以检索图像(例如,hdr图像)。在564处,控制电路可以使检索到的图像去扭曲(例如,如果可见光传感器具有鱼眼镜头)以产生非扭曲的图像(例如,通过从扭曲的图像生成恒定轮廓角的行)。在566处,控制电路可确定非扭曲的图像的背景亮度l
bg
。例如,控制电路可以计算百分位亮度(例如,第25百分位亮度l
25
),其可以是表示非扭曲的图像的背景(例如,基线)的亮度的值。
101.在568处,控制电路可以确定对比亮度l
c
,其可以表示可以产生对比眩光状况(例如,相对眩光状况)的眩光源的亮度。例如,控制电路可以被配置为将背景亮度l
bg
缩放对比阈值c
th
(例如,大约15)以生成对比亮度l
c
,例如,l
c
=c
th
·
l
bg
。如果在570处对比亮度l
c
大于低亮度阈值l
th
‑
lo
(例如,大约4,000cd/m2)并且小于高亮度阈值l
th
‑
hi
(例如,大约10,000cd/m2),则控制电路可以在572处将亮度阈值l
th
设置为等于对比亮度l
c
。否则,控制电路可以在574处将亮度阈值l
th
设置为等于高亮度阈值l
th
‑
hi
。
102.在576处,控制电路可以(从564)确定非扭曲的图像的第i像素的亮度l
pi
(例如,通过从hdr图像的数据中检索亮度l
pi
和/或计算亮度l
pi
)。例如,控制电路可以在第一次执行576时在非扭曲的图像的底行上的像素之一处(例如,在底行的左或右)开始。在578处如果计算的亮度l
pi
大于亮度阈值l
th
,则控制电路可以在580处确定存在眩光状况。在582处,控制电路可以使用来自非扭曲的图像的第i个像素的行来计算第i像素的轮廓角a
pi
(例如,表示眩光源的近似位置)。在584处,控制电路可基于轮廓角a
pi
确定用于防止来自眩光源的光超过最大穿透距离和/或防止工作表面上的眩光的遮挡位置(例如,使用如上所示的等式2和/或等式3)。用于防止来自眩光源的光超过最大穿透距离和/或用于防止工作表面上的眩光的遮挡位置可取决于最大穿透距离、工作表面的高度和/或工作表面距窗口的距离,其可以存储在存储器中。在586处,控制电路可以发送遮挡控制命令,用于将空间中的机动窗帘的位置控制到用于防止工作表面上的眩光的确定的遮挡位置(例如,直接地或经由系统控制器110),然后眩光检测过程550退出。或者,控制电路可以被配置为将轮廓角a
pi
发送到系统控制器110,系统控制器110可以确定用于防止工作表面上的眩光的遮挡位置并将遮挡控制命令发送到机动窗帘。尽管可以将图像处理描述为在可见光传感器处执行,但是可以在负载控制系统中的系统控制器或另一图像处理设备处执行图像处理。
103.如果控制电路在588处未处理非扭曲的图像的像素,则控制电路可在590处移动到下一像素(例如,i=i+1)并且可在576处计算下一像素的亮度l
pi
。如前所述,控制电路可以从非扭曲的图像的底行(例如,在底行的左侧或右侧)上的像素之一开始。当控制电路在590移动到下一个像素时,控制电路可以移动到当前像素行中的与前一像素相邻的像素(例如,移动到前一像素的左或右)。当控制电路计算出一行中每个像素的亮度时,控制电路可以向前移动到下一行像素。以这种方式,控制电路可以通过从底行开始并向前移动通过图像的行来逐步通过非扭曲的图像中的多个像素。
104.当控制电路在588处完成处理非扭曲的图像的像素而不确定存在眩光状况时,控制电路可以在592处确定不存在眩光状况并且可以在586处发送用于控制机动窗帘的位置的遮挡控制命令,然后眩光检测过程550退出。例如,如果不存在眩光状况,则控制电路可以发送用于打开机动窗帘(例如,到完全打开位置或遮阳板位置)的遮挡命令。
105.图6是背景亮度过程600的简化流程图。背景亮度过程600可以确定表示图像(例
如,非扭曲的图像)的背景的亮度的值。背景亮度过程600可以由可见光传感器的控制电路(例如,可见光传感器300的控制电路310)、系统控制器或其他图像处理设备在610处执行。例如,背景亮度过程600可以在图5a中所示的眩光检测过程500的516处和/或图5b中所示的眩光检测过程550的566处执行,以计算非扭曲的图像的第25百分位亮度l
25
。在612处,控制电路可以按照从最暗到最亮的顺序对图像的像素重新排序。在614处,控制电路可以找到从最暗像素到最亮像素的路上的预定百分比(例如,大约25%)的像素。例如,如果图像具有总数np的像素,则控制电路可以对重新排序的像素(从最暗到最亮)进行计数,直到找到编号为n
25
的像素,其中,n
25
=0.25
·
n
p
。在616处,控制电路可以计算像素的亮度(例如,使用编号为n
25
处的像素的颜色)以确定第25百分位亮度l
25
。或者,控制电路可以计算不同编号的像素的亮度以设置为背景的亮度。背景亮度过程600可以在618处退出。
106.虽然这里通过控制电路处理从底部(例如,底行)开始处理非扭曲的图像并且向上处理图像的行而描述图4和图5的眩光检测过程400、500,当房间102包括作为自下而上的窗帘的机动窗帘时,可以颠倒该过程,例如,窗帘织物从窗口的底部移动到窗口的顶部以覆盖窗口。例如,当机动窗帘是自下而上的窗帘时,眩光检测过程400、500可以从顶部(例如,顶行)开始处理图像并且向下处理图像的行,例如,直到检测到眩光源。
107.图7a是示例防眩光过程700的序列图。如图7a所示,防眩光过程700可以由可见光传感器702(例如,可见光传感器182、300)和机动窗帘704(例如,机动卷帘220)执行。在710处,可见光传感器702可以记录房间和/或建筑物外部的图像。在712处,可见光传感器可以处理图像以检测眩光状况。例如,眩光状况的检测可以包括计算图像中的像素的亮度l
pi
并将它们与亮度阈值(例如,图5a的520、522、530、536和/或538)进行比较。
108.如果检测到眩光状况,则可见光传感器702可以在714处确定眩光状况的轮廓角。如本文所述,轮廓角可以定义眩光源在窗口(例如,图2中的窗口202)外部的位置。可以基于检测到的眩光源的位置(例如,在710处记录的图像中的像素)来确定轮廓角。可见光传感器702可包括查找表以确定轮廓角。例如,查找表可以基于检测到的眩光源的位置(例如,在710处记录的图像中的像素)提供轮廓角的指示。
109.在716处,可见光传感器702可以确定机动窗帘704的遮挡位置。遮挡位置可以防止眩光状况影响房间(例如,房间102和/或空间200)。例如,遮挡织物可以定位成使得遮挡织物阻挡来自由其中检测到眩光的像素表示的眩光源的光。在718处,遮挡位置可以被传送到机动窗帘704。在接收遮挡位置之后,机动窗帘可以在720处将遮挡织物移动到指示的位置。
110.图7b是示例防眩光过程750的序列图。如图7b所示,防眩光过程750可以由可见光传感器752(例如,可见光传感器182、300)、系统控制器754(例如,系统控制器110)和机动窗帘756(例如,机动卷帘220)执行。在758处,可见光传感器752可以记录房间和/或建筑物外部的图像。在760处,可见光传感器可以处理图像以检测眩光状况。例如,眩光状况的检测可以包括计算图像中的像素的亮度l
pi
并将它们与亮度阈值(例如,图5a的520、522、530、536和/或538)进行比较。
111.如果检测到眩光状况,则可见光传感器752可以在762处确定眩光状况的轮廓角。如本文所述,轮廓角可以定义眩光源在窗口(例如,图2中的窗口202)外部的位置。可以基于检测到的眩光源的位置(例如,在758处记录的图像中的像素)来确定轮廓角。可见光传感器752可包括查找表以确定轮廓角。例如,查找表可以基于检测到的眩光源的位置(例如,在
758处记录的图像中的像素)提供轮廓角的指示。
112.在764处,可见光传感器752可以将轮廓角发送到系统控制器754(例如,系统控制器110)。在766处,系统控制器754可以确定机动窗帘756的遮挡位置。例如,遮挡织物可以定位成使得遮挡织物阻挡来自由其中检测到眩光的像素表示的眩光源的光。在768处,系统控制器754可以将遮挡位置发送到机动窗帘756。在接收遮挡位置之后,机动窗帘可以在770处将遮挡织物移动到指示的位置。尽管可见光传感器752被示出为处理图像,系统控制器754还可以或可选地在可见光传感器752生成图像之后执行图像处理。
113.图8是用于检测眩光状况的非扭曲的图像800的简化示例。如图8所示,图像800可以包括一个或多个像素(例如,像素802、804和806)。像素可以被组织在一个或多个像素行和/或一个或多个像素列中。可见光传感器(例如,可见光传感器300)可以检索图像800并处理图像以确定是否存在眩光状况。可见光传感器可以处理图像以确定是否存在眩光状况。该确定可以包括确定是否存在绝对眩光状况和/或是否存在相对眩光状况。
114.可见光传感器可以开始处理图像800的底部中的第一像素。例如,可见光传感器可以开始在像素802处处理图像800。可见光传感器可以确定像素802的亮度以确定是否存在绝对眩光状况和/或相对眩光状况。如果可见光传感器确定不存在眩光状况(例如,绝对眩光状况和/或相对眩光状况),则可见光传感器可以处理图像中的下一个像素(例如,像素804)。
115.可见光传感器可以继续处理图像中的像素,直到可见光传感器确定存在眩光状况或者完成处理图像。例如,可见光传感器可以确定在像素806处存在相对眩光状况或绝对眩光状况(例如,像素806的亮度高于高亮度阈值或相对亮度阈值)并且停止处理像素806处的图像。
116.图9是示出示例系统控制器900(诸如本文描述的系统控制器110)的框图。系统控制器900可以包括用于控制系统控制器900的功能的控制电路902。控制电路902可以包括一个或多个通用处理器、专用处理器、传统处理器、数字信号处理器(dsp)、微处理器、集成电路、可编程逻辑器件(pld)或专用集成电路(asic)等。控制电路902可以执行信号编码、数据处理、图像处理、功率控制、输入/输出处理或使系统控制器900能够如本文所述执行的任何其他功能。控制电路902可以将信息存储在存储器904中和/或从存储器904检索信息。存储器904可以包括不可移动存储器和/或可移动存储器。不可移动存储器可以包括随机存取存储器(ram)、只读存储器(rom)、硬盘或任何其他类型的不可移动存储器存储。可移动存储器可以包括订户身份模块(sim)卡、记忆棒、存储卡或任何其他类型的可移动存储器。
117.系统控制器900可以包括用于发送和/或接收信息的通信电路906。通信电路906可以执行无线和/或有线通信。系统控制器900还可以或可选地包括用于发送和/或接收信息的通信电路908。通信电路906可以执行无线和/或有线通信。通信电路906和908可以与控制电路902通信。通信电路906和908可以包括rf收发器或能够经由天线执行无线通信的其他通信模块。通信电路906和通信电路908可以能够经由相同的通信信道或不同的通信信道执行通信。例如,通信电路906可以能够经由无线通信信道(例如,近场通信(nfc)、蜂窝等)(例如,与网络设备、通过网络等)进行通信,并且通信电路908可以能够经由另一无线通信信道(例如,或专有通信信道,如clear connecttm)(与负载控制系统中的控制设备和/或其他设备)通信。
118.控制电路902可以与led指示器912通信,以向用户提供指示。控制电路902可以与致动器914(例如,一个或多个按钮)通信,致动器914可以由用户致动以将用户选择传送到控制电路902。例如,致动器914可以被致动以将控制电路902置于关联模式和/或传送来自系统控制器900的关联消息。
119.系统控制器900内的每个模块可以由电源910供电。电源910可以包括例如ac电源或dc电源。电源910可以产生供电电压vcc,用于为系统控制器900内的模块供电。
120.图10是示出如本文所述的示例控制目标设备(例如,负载控制设备1000)的框图。负载控制设备1000可以是调光器开关、电子开关、灯的电子镇流器、led光源的led驱动器、ac插入式负载控制设备、温度控制设备(例如,恒温器)、用于机动窗帘的电机驱动单元或其他负载控制设备。负载控制设备1000可以包括通信电路1002。通信电路1002可以包括接收器、rf收发器或能够经由通信链路1010执行有线和/或无线通信的其他通信模块。通信电路1002可以与控制电路1004进行通信。控制电路1004可以包括一个或多个通用处理器、专用处理器、传统处理器、数字信号处理器(dsp)、微处理器、集成电路、可编程逻辑器件(pld)或专用集成电路(asic)等。控制电路1004可以执行信号编码、数据处理、功率控制、输入/输出处理或使负载控制设备1000能够如本文所述执行的任何其他功能。
121.控制电路1004可以将信息存储在存储器1006中和/或从存储器1006检索信息。例如,存储器1006可以保存相关的控制设备和/或控制指令的注册表。存储器1006可以包括不可移动存储器和/或可移动存储器。负载控制电路1008可以从控制电路1004接收指令,并且可以基于所接收的指令来控制电负载1016。例如,电负载1016可以控制机动窗帘(例如,机动窗帘150)。负载控制电路1008可以向控制电路1004发送关于电负载1016的状态的状态反馈。负载控制电路1008可以经由热连接1012和中性连接1014接收电力,并且可以向电负载1016提供电力量。电负载1016可包括任何类型的电负载。
122.控制电路1004可以与致动器1018(例如,一个或多个按钮)通信,致动器1018可以由用户致动以将用户选择传送到控制电路1004。例如,致动器1018可以被致动以将控制电路1004置于关联模式和/或传送来自负载控制设备1000的关联消息。
123.尽管这里以特定的组合描述了特征和元件,但是可以单独使用或与其他特征和元件进行任何组合地使用每个特征或元件。例如,这里描述的功能可以被描述为由诸如遥控设备或照明设备的控制设备执行,但是可以由集线器设备或网络设备类似地执行。这里描述的方法可以在并入在计算机可读介质中的计算机程序、软件或固件中实现,以由计算机或处理器执行。计算机可读介质的示例包括电子信号(通过有线或无线连接传输)和计算机可读存储介质。计算机可读存储介质的示例包括但不限于只读存储器(rom)、随机存取存储器(ram)、可移动磁盘以及诸如cd
‑
rom盘和数字通用盘(dvd)之类的光学介质。
124.虽然参考控制机动窗帘(例如,机动窗帘150和/或机动卷帘220)以防止眩光状况来描述本文所述的方法,但是该方法可用于控制其他类型的控制设备以防止和/或减轻眩光状况。例如,本文描述的方法可用于控制可控电致变色玻璃的透射率和/或调节室内或室外可控百叶窗的位置以防止和/或减轻眩光状况。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1