基于向量叉乘的面向曲面零件测量点的网格面片检索方法
1.本发明涉及曲面零件精密技术领域,尤其涉及基于向量叉乘的面向曲面零 件测量点的网格面片检索方法。
背景技术:
2.在复杂曲面零件的生产过程中,需要用相应的检测技术对其加工精度进行 检测和控制。其中,基于三坐标测量机(cmm)的检测技术常用于精密零件的形位 精度检测。目前复杂曲面零件的三维数据在计算机中常存储为参数化模型,其 中的任意外形数据信息均通过外形特征或参数曲面等数字化信息精确记录。通 过检索所记录的数字化信息直接获得测量点对应的零件外形法矢方向,实现精 度检测的测头移动。
3.随着数字化检测及逆向工程技术的快速发展,三角网格模型也被越来越多 地用于复杂曲面零件的外形轮廓表达。三角网格模型由一系列连接的三角形面 片近似地表达模型的外形轮廓,在计算机中常以stl的文件格式进行存储,文 件内部对每个网格面片的数据信息进行了逐一罗列。但网格面片的存储顺序是 随机的,且每个网格面片只记录了网格面片的法矢向量与三个顶点的坐标信息。 stl文件中每个网格面片的数据信息由7行代码组成,其中,第1行为网格面片 指向实体外部的法矢方向数据;第2和第6行为当前面片顶点遍历的开始与结 束声明;第3至第5行为网格面片三个顶点的坐标信息,且根据面片法矢规则, 三个顶点沿面片法矢的右手螺旋方向排序;第7行为结束当前网格面片的声明。 所有数字数据保留8位有效数字,且以科学计数法表示。
4.如图1所示,对于三角网格模型的精度检测,在已知检测位置(即测量点) 的情况下,需要检索出对应的网格面片,再根据网格面片的法矢方向反向移动 检测测头,并最终获得零件表面的精度检测数值。其中,面片法矢的方向信息 可根据stl文件的存储数据直接获取,但测量点对应网格面片的检索操作则缺 少直接方法。
技术实现要素:
5.本发明的目的在于针对背景技术中的缺陷,提出一种面向曲面零件测量点 的网格面片搜索方法,本发明实现了三角网格模型对应stl文件的直接数据处 理操作,快速获取测量点对应模型外形轮廓的外法矢方向,有效驱动精度检测 的测头移动。与现有技术相比,本发明不需要进行模型数据的拓扑重构,直接 对stl文件的网格面片信息进行数据处理判断操作,占用计算机资源更小,时 间消耗更短。
6.为达此目的,本发明采用以下技术方案:
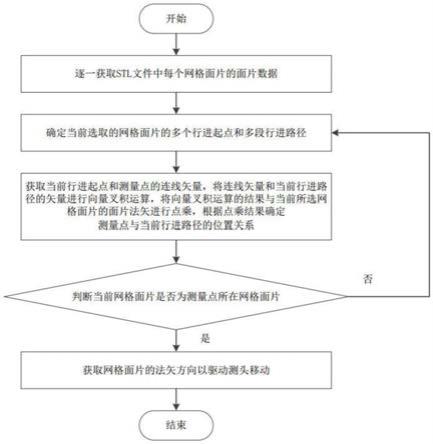
7.基于向量叉乘的面向曲面零件测量点的网格面片检索方法,包括如下步骤:
8.步骤a:逐一获取stl文件中的每个网格面片的面片数据;
9.步骤b:确定当前选取的网格面片的多个行进起点和多段行进路径;
10.步骤c:获取当前行进起点和测量点的连线矢量,将连线矢量和当前行进路 径的矢量进行向量叉积运算,将向量叉积运算的结果与当前所选网格面片的面 片法矢进行点
乘,根据点乘结果判断测量点与当前行进路径的位置关系;
11.重复执行步骤b和步骤c,直至获取测量点与每一段行径路径的位置关系;
12.步骤d:根据测量点与每一段行径路径的位置关系来判断当前所选网格面片 是否为测量点所对应的网格面片,若是,则进入步骤e,若否,则重新选取新的 网格面片,返回步骤b;
13.步骤e:获取网格面片的法矢方向以驱动测头移动。
14.优选的,在所述步骤a中,逐一获取stl文件中的每个网格面片的面片数 据具体包括:
15.依次提取stl文件中每个网格面片的数据代码,将所提取的数据代码进行 数据转换;
16.根据转换后的数据获得当前选取的网格面片的三个顶点的三维坐标。
17.优选的,在所述步骤b中,确定当前选取的网格面片的多个行进起点和多 段行进路径包括:
18.步骤b1:将当前选取的网格面片的第一个顶点作为当前行进起点,将第一 个顶点到第二个顶点的路径作为当前行进路径,执行步骤c以确定测量点与当 前行进路径的位置关系;
19.步骤b2:将当前选取的网格面片的第二个顶点作为当前行进起点,将第二 个顶点到第三个顶点的路径作为当前行进路径,执行步骤c以确定测量点与当 前行进路径的位置关系;
20.步骤b3:将当前选取的网格面片的第三个顶点作为当前行进起点,将第三 个顶点到第一个顶点的路径作为当前行进路径,执行步骤c以确定测量点与当 前行进路径的位置关系。
21.优选的,在所述步骤c中:获取当前行进起点和测量点的连线矢量,将连 线矢量和当前行进路径的矢量进行向量叉积运算,具体包括:
22.当执行所述步骤b1时,根据公式一进行向量叉积运算;
23.公式一:
[0024][0025]
其中:
[0026]
当前选取的网格面片的三个顶点沿面片法矢的右手螺旋方向排序依次为 v1、v2、v3,三个顶点的三维坐标为v1(v
1x
,v
1y
,v
1z
)、v2(v
2x
,v
2y
,v
2z
)、 v3(v
3x
,v
3y
,v
3z
);
[0027]
测量点p的三维坐标为(p
x
,p
y
,p
z
);
[0028]
表示当前行进路径的矢量;
[0029]
表示当前行进起点v1与测量点p的连线矢量;
[0030]
为符合到右手定则的单位向量且必然与当前选取的网格面片的 法矢平行;
[0031]
∠pv1v2表示与的夹角。
[0032]
优选的,在所述步骤c中:获取当前行进起点和测量点的连线矢量,将连 线矢量和当前行进路径的矢量进行向量叉积运算,具体包括:
[0033]
当执行所述步骤b2时,根据公式二进行向量叉积运算;
[0034]
公式二:
[0035][0036]
其中:
[0037]
当前选取的网格面片的三个顶点沿面片法矢的右手螺旋方向排序依次为 v1、v2、v3,三个顶点的三维坐标为v1(v
1x
,v
1y
,v
1z
)、v2(v
2x
,v
2y
,v
2z
)、 v3(v
3x
,v
3y
,v
3z
);
[0038]
测量点p的三维坐标为(p
x
,p
y
,p
z
);
[0039]
表示当前行进路径的矢量;
[0040]
表示当前行进起点v2与测量点p的连线矢量;
[0041]
为符合到右手定则的单位向量且必然与当前选取的网格面片的 法矢平行;
[0042]
∠pv2v3表示与的夹角。
[0043]
优选的,在所述步骤c中:获取当前行进起点和测量点的连线矢量,将连 线矢量和当前行进路径的矢量进行向量叉积运算,具体包括:
[0044]
当执行所述步骤b3时,根据公式三进行向量叉积运算;
[0045]
公式三:
[0046][0047]
其中:
[0048]
当前选取的网格面片的三个顶点沿面片法矢的右手螺旋方向排序依次为 v1、v2、v3,三个顶点的三维坐标为v1(v
1x
,v
1y
,v
1z
)、v2(v
2x
,v
2y
,v
2z
)、 v3(v
3x
,v
3y
,v
3z
);
[0049]
测量点p的三维坐标为(p
x
,p
y
,p
z
);
[0050]
表示当前行进路径的矢量;
[0051]
表示当前行进起点v3与测量点p的连线矢量;
[0052]
为符合到右手定则的单位向量且必然与当前选取的网格面片的 法矢平行;
[0053]
∠pv3v1表示与的夹角。
[0054]
优选的,在所述步骤c中,将向量叉积运算的结果与当前所选网格面片的 面片法矢进行点乘,具体包括:
[0055]
当执行步骤b1时,根据公式四进行点乘;
[0056]
公式四:
[0057][0058]
当执行步骤b2时,根据公式五进行点乘:
[0059]
公式五:
[0060][0061]
当执行步骤b3时,根据公式六进行点乘:
[0062]
公式六:
[0063][0064]
其中:
[0065]
表示当前选取的网格面片的法矢,且其三维坐标为
[0066]
优选的,在所述步骤c中,根据点乘结果判断测量点与当前行进路径的位 置关系,具体包括:
[0067]
若点乘结果为正数时,则向量叉积运算结果所得矢量与面片法矢同向;
[0068]
若点乘结果为负数时,则向量叉积运算结果所得矢量与面片法矢反向;
[0069]
当向量叉积运算结果所得矢量与面片法矢同向:
[0070]
∠pv1v2∈0
°
~180
°
,sin∠pv1v2>0,测量点p位于行进路径v1→
v2的左 方;
[0071]
∠pv2v3∈0
°
~180
°
,sin∠pv2v3>0,测量点p位于行进路径v2→
v3的左 方;
[0072]
∠pv3v1∈0
°
~180
°
,sin∠pv3v1>0,测量点p位于行进路径v3→
v1的左 方;
[0073]
当向量叉积运算结果所得矢量与面片法矢同向:
[0074]
∠pv1v2∈
‑
180
°
~0
°
,sin∠pv1v2<0,测量点p位于行进路径v1→
v2的右 方;
[0075]
∠pv2v3∈
‑
180
°
~0
°
,sin∠pv2v3<0,测量点p位于行进路径v2→
v3的右 方;
[0076]
∠pv3v1∈
‑
180
°
~0
°
,sin∠pv3v1<0,测量点p位于行进路径v3→
v1的右 方。
[0077]
优选的,在所述步骤d中,根据测量点与每一段行径路径的位置关系来判 断当前所选网格面片是否为测量点所对应的网格面片,具体包括:
[0078]
当测量点相对于每一段行进路径均始终保持相同方向,则当前选取的网格 面片为测量点所对应的网格面片。
[0079]
优选的,在所述步骤e中,具体包括:
[0080]
提取stl文件中测量点所对应的网格面片的数据代码;
[0081]
根据数据代码获取测量点所对应的网格面片的法矢方向和法矢矢量的x、y、 z轴轴向数值;
[0082]
根据所获取的轴向数值驱动精度检测的测头移动。
[0083]
本发明的实施例的技术方案所提供的有益效果包括:
[0084]
本发明实现了三角网格模型对应stl文件的直接数据处理操作,快速获取 测量点对应模型外形轮廓的外法矢方向,有效驱动精度检测的测头移动。与现 有技术相比,本发明不需要进行模型数据的拓扑重构,直接对stl文件的网格 面片信息进行数据处理判断操作,占用计算机资源更小,时间消耗更短。
附图说明
[0085]
图1是本发明的三角网格模型的精度检测图;
[0086]
图2是本发明一个实施例的网格面片对应测量点所在位置的示意图;
[0087]
图3是本发明一个实施例的网格面片不对应测量点所在位置的示意图;
[0088]
图4是本发明的一个实施例的以v1为行进起点,v1→
v2为行进路径的向量 叉积运算图;
[0089]
图5是本发明的面向曲面零件测量点的网格面片搜索方法的流程图;
[0090]
图6是本发明的一个实施例的stl文件中的面片数据提取示意图。
具体实施方式
[0091]
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
[0092]
现有技术中,三角网格模型被用于复杂曲面零件的外形轮廓表达,但角网 格模型由一系列的连接的三角形面片近似地表达模型的外形轮廓,在计算机中 以stl的文件格式进行存储,文件内部对每个网格面片的数据信息进行逐一罗 列。但网格面片的存储顺序是随机的,且每个网格面片只记录了网格面片的法 矢向量与三个顶点的坐标信息。
[0093]
stl文件中每个网格面片的数据信息由7行代码组成,如下例所示:
[0094][0095]
其中,第1行为网格面片指向实体外部的法矢方向数据;第2和第6行为 当前面片顶点遍历的开始与结束声明;第3至第5行为网格面片三个顶点的坐 标信息,且根据面片法矢规则,三个顶点沿面片法矢的右手螺旋方向排序;第7 行为结束当前网格面片的声明。所有数字数据保留8位有效数字,且以科学计 数法表示。
[0096]
如图1所示,对于三角网格模型的精度检测,在已知检测位置(即测量点) 的情况下,需要检索出对应的网格面片,再根据网格面片的法矢方向反向移动 检测测头,并最终获得零件表面的精度检测数值。其中,面片法矢的方向信息 可根据stl文件的存储数据直接获取,但测量点对应网格面片的检索操作则缺 少直接方法,常规技术多为对stl文件进行大量的拓扑数据重构操作,再通过 拓扑重构数据的数据处理实现测量点对应网格面片的检索获取。
[0097]
由上述现有技术可知,面向测量点对应网格面片的检索操作,目前的研究 方法均需要先对三角网格模型所对应的stl文件进行大量的拓扑数据重构操作, 再利用拓扑重建的模型数据检索测量点所对应的网格面片并获取驱动测头移动 的面片法矢信息。然而,拓扑数据的重构操作耗时,所生成的模型拓扑重构数 据信息量大,占用计算机资源,不利于复杂曲面零件对应三角网格模型的直接 精度测量。
[0098]
故为了解决上述问题,本技术提出基于向量叉乘的面向曲面零件测量点的 网格面片检索方法,为了更好的阐述的本技术的技术方案,在此先对本技术的 技术方案的主要原理进行解析,具体包括:
[0099]
若所选网格面片为测量点所在的唯一网格面片,则测量点位于网格面片内 部,沿着网格面片的三条边走一圈,测量点相对于行进路径始终保持相同方向; 若所选网格面片不是测量点所在的唯一网格面片,则测量点位于网格面片外部, 沿着网格面片的三条边走一圈,测量点相对于行进路径必然呈现出不同的相对 方向。
[0100]
如图2所示,所选网格面片为测量点所在的唯一网格面片,则测量点位于 网格面片内部,沿网格面片的三条边逆时针走一圈,测量点均位于行进路径的 左方;如图3所示,所选网格面片不是测量点所在位置,测量点位于网格面片 外部,沿着网格面片的三条边逆时针走一圈,测量点相对于行进路径会同时出 现左方与右方的情况。
[0101]
基于上述原理,依次对stl文件中每网格面片的数据信息进行比较判断, 即可判
断获取测量点所在唯一网格面片的数据信息,并利用其面片法矢方向来 驱动精度检测的测头移动,如图4所示,包括如下步骤:
[0102]
步骤a:逐一获取stl文件中的每个网格面片的面片数据;
[0103]
在所述步骤a中,逐一获取stl文件中的每个网格面片的面片数据具体包 括:
[0104]
依次提取stl文件中每个网格面片的数据代码,将所提取的数据代码进行 数据转换;
[0105]
根据转换后的数据获得当前选取的网格面片的三个顶点的三维坐标。
[0106]
如图6所示,由上述常规技术可知,stl文件内部对每个网格面片的数据信 息进行了随机的逐一罗列,且每个网格面片的数据信息由7行代码组成。逐一 获取stl文件中的面片数据,即是依次提取stl文件中的7行数据代码,并对 这些代码进行数据转换;对于每次提取的7行数据代码对应于一个网格面片, 如下所示:
[0107][0108]
其中第3行到第5行分别对应于当前面片的三个顶点,每行代码英文字符
ꢀ“
vertex”后的三个数据以空格间隔,并分别对应于每个顶点的x、y、z坐标。 因此基于stl文件中每个网格面片的数据代码转换后可获取当前选取的网格面 片的三个顶点的三维坐标,分别为v1(v
1x
,v
1y
,v
1z
)、v2(v
2x
,v
2y
,v
2z
)、 v3(v
3x
,v
3y
,v
3z
),法矢向量
[0109]
步骤b:确定当前选取的网格面片的多个行进起点和多段行进路径;
[0110]
在本实施例中,由于网格面片为三角网格面片,故存在三个顶点v1、v2、v3,行 进路径为v1→
v2→
v3→
v1的循环方向,即从面片法矢俯视看的逆时针方向; 由于行进路径是划分为三段,故需要通过每段行进路径的矢量及当前行进起点 和测量点的连线矢量的向量叉积、点乘运算来判断测量点与每段行进路径的位 置关系,故需要确定每段行进路径的行进起点;
[0111]
步骤c:获取当前行进起点和测量点的连线矢量,将连线矢量和当前行进路 径的矢量进行向量叉积运算,将向量叉积运算的结果与当前所选网格面片的面 片法矢进行点乘,根据点乘结果判断测量点与当前行进路径的位置关系;
[0112]
重复执行步骤b和步骤c,直至获取测量点与每一段行径路径的位置关系;
[0113]
需要说明的是,本实施例中的行进路径按照面片法矢俯视看的逆时针方向 可划分为v1→
v2、v2→
v3、v3→
v1,在该方向上看来,测量点相对于行进路径 始终保持同一方向,
则测量点将位于行进路径的左方,即本实施例下文所述内 容;但若是行进路径按照面片法矢不同的角度以及不同的时针方向,则测量点 则不仅仅可位于行进路径的左方,也可位于行进路径的右方,具体情况需根据 实际生产需求进行判断;但只需测量点分别相对于三段行径路径始终保持同一 方向即可使用本技术所述方法进行判断;
[0114]
优选的,在所述步骤b中,确定当前选取的网格面片的多个行进起点和多 段行进路径包括:
[0115]
步骤b1:将当前选取的网格面片的第一个顶点作为当前行进起点,将第一 个顶点到第二个顶点的路径作为当前行进路径,执行步骤c以确定测量点与当 前行进路径的位置关系;
[0116]
步骤b2:将当前选取的网格面片的第二个顶点作为当前行进起点,将第二 个顶点到第三个顶点的路径作为当前行进路径,执行步骤c以确定测量点与当 前行进路径的位置关系;
[0117]
步骤b3:将当前选取的网格面片的第三个顶点作为当前行进起点,将第三 个顶点到第一个顶点的路径作为当前行进路径,执行步骤c以确定测量点与当 前行进路径的位置关系。
[0118]
优选的,如图4所示,图4为本实施例中,以v1为行进起点,v1→
v2为行 进路径的向量叉积运算图,在所述步骤c中:获取当前行进起点和测量点的连 线矢量,将连线矢量和当前行进路径的矢量进行向量叉积运算,具体包括:
[0119]
当执行所述步骤b1时,根据公式一进行向量叉积运算;
[0120]
公式一:
[0121][0122]
其中:
[0123]
当前选取的网格面片的三个顶点沿面片法矢的右手螺旋方向排序依次为 v1、v2、v3,三个顶点的三维坐标为v1(v
1x
,v
1y
,v
1z
)、v2(v
2x
,v
2y
,v
2z
)、 v3(v
3x
,v
3y
,v
3z
);
[0124]
测量点p的三维坐标为(p
x
,p
y
,p
z
);
[0125]
表示当前行进路径的矢量;
[0126]
表示当前行进起点v1与测量点p的连线矢量;
[0127]
为符合到右手定则的单位向量且必然与当前选取的网格面片的 法矢平行;
[0128]
∠pv1v2表示与的夹角。
[0129]
优选的,在所述步骤c中:获取当前行进起点和测量点的连线矢量,将连 线矢量和当前行进路径的矢量进行向量叉积运算,具体包括:
[0130]
当执行所述步骤b2时,根据公式二进行向量叉积运算;
[0131]
公式二:
[0132][0133]
其中:
[0134]
当前选取的网格面片的三个顶点沿面片法矢的右手螺旋方向排序依次为 v1、v2、v3,三个顶点的三维坐标为v1(v
1x
,v
1y
,v
1z
)、v2(v
2x
,v
2y
,v
2z
)、 v3(v
3x
,v
3y
,v
3z
);
[0135]
测量点p的三维坐标为(p
x
,p
y
,p
z
);
[0136]
表示当前行进路径的矢量;
[0137]
表示当前行进起点v2与测量点p的连线矢量;
[0138]
为符合到右手定则的单位向量且必然与当前选取的网格面片的 法矢平行;
[0139]
∠pv2v3表示与的夹角。
[0140]
优选的,在所述步骤c中:获取当前行进起点和测量点的连线矢量,将连 线矢量和当前行进路径的矢量进行向量叉积运算,具体包括:
[0141]
当执行所述步骤b3时,根据公式三进行向量叉积运算;
[0142]
公式三:
[0143][0144]
其中:
[0145]
当前选取的网格面片的三个顶点沿面片法矢的右手螺旋方向排序依次为 v1、v2、v3,三个顶点的三维坐标为v1(v
1x
,v
1y
,v
1z
)、v2(v
2x
,v
2y
,v
2z
)、 v3(v
3x
,v
3y
,v
3z
);
[0146]
测量点p的三维坐标为(p
x
,p
y
,p
z
);
[0147]
表示当前行进路径的矢量;
[0148]
表示当前行进起点v3与测量点p的连线矢量;
[0149]
为符合到右手定则的单位向量且必然与当前选取的网格面片的 法矢平行;
[0150]
∠pv3v1表示与的夹角。
[0151]
优选的,在所述步骤c中,将向量叉积运算的结果与当前所选网格面片的 面片法矢进行点乘,具体包括:
[0152]
当执行步骤b1时,根据公式四进行点乘;
[0153]
公式四:
[0154][0155]
当执行步骤b2时,根据公式五进行点乘:
[0156]
公式五:
[0157][0158]
当执行步骤b3时,根据公式六进行点乘:
[0159]
公式六:
[0160][0161]
其中:
[0162]
表示当前选取的网格面片的法矢,且其三维坐标为
[0163]
优选的,在所述步骤c中,根据点乘结果判断测量点与当前行进路径的位 置关系,具体包括:
[0164]
若点乘结果为正数时,则向量叉积运算结果所得矢量与面片法矢同向;
[0165]
若点乘结果为负数时,则向量叉积运算结果所得矢量与面片法矢反向;
[0166]
当向量叉积运算结果所得矢量与面片法矢同向:
[0167]
∠pv1v2∈0
°
~180
°
,sin∠pv1v2>0,测量点p位于行进路径v1→
v2的左 方;
[0168]
∠pv2v3∈0
°
~180
°
,sin∠pv2v3>0,测量点p位于行进路径v2→
v3的左 方;
[0169]
∠pv3v1∈0
°
~180
°
,sin∠pv3v1>0,测量点p位于行进路径v3→
v1的左 方;
[0170]
当向量叉积运算结果所得矢量与面片法矢同向:
[0171]
∠pv1v2∈
‑
180
°
~0
°
,sin∠pv1v2<0,测量点p位于行进路径v1→
v2的右 方;
[0172]
∠pv2v3∈
‑
180
°
~0
°
,sin∠pv2v3<0,测量点p位于行进路径v2→
v3的右 方;
[0173]
∠pv3v1∈
‑
180
°
~0
°
,sin∠pv3v1<0,测量点p位于行进路径v3→
v1的右 方。
[0174]
需要说明的是,在本实施例中,以∠pv1v2为例,若测量点在行进路径左方, ∠pv1v2为0
°
~180
°
,sin∠pv1v2>0,向量叉积计算所得矢量与面片法矢同向; 反之,若测量点在行进路径右方,∠pv1v2为
‑
180
°
~0
°
,sin∠pv1v2<0,向量 叉积计算所得矢量与面片
法矢反向;
[0175]
∠pv2v3和∠pv3v1同理;
[0176]
故可通过判断∠pv1v2、∠pv2v3和∠pv3v1的区间范围,来判断测量点是否 位于行进路径的左方,而上述角度的判断,不可通过sin∠pv1v2、sin∠pv2v3、 sin∠pv3v1的大小来进行判断,因为当sin三角函数的值为正数时,其角度也可 能为负角度,故仅仅通过向量叉积的运算结果来判断是不够的;而当向量叉积 计算所得矢量与面片法矢同向时,上述角度的区间必然在0
°
~180
°
,向量叉积计 算所得矢量与面片法矢反向时,上述角度的区间必然在
‑
180
°
~0
°
,因此可通过 判断向量叉积所得矢量与网格面片法矢是否同向来判断上述角度的区间,从而 判断测量点与行进路径的关系,而判断向量叉积所得矢量与网格面片法矢是否 同向可通过将向量叉积所得矢量与网格面片矢量的点乘结果来判断,当点乘结 果为正数时,则向量叉积所得矢量与网格面片法矢同向,当点乘结果为负数时, 则向量叉积所得矢量与网格面片法矢反向。
[0177]
步骤d:根据测量点与每一段行径路径的位置关系来判断当前所选网格面片 是否为测量点所对应的网格面片,若是,则进入步骤e,若否,则重新选取新的 网格面片,返回步骤b;
[0178]
当测量点相对于每一段行进路径均始终保持相同方向,则当前选取的网格 面片为测量点所对应的网格面片。
[0179]
在本实施例中,当测量点p均位于行进路径v1→
v2、v2→
v3、v3→
v1的左 方时,则当前所选网格面片为测量点p所对应的网格面片;
[0180]
步骤e:获取网格面片的法矢方向以驱动测头移动。
[0181]
优选的,在所述步骤e中,具体包括:
[0182]
提取stl文件中测量点所对应的网格面片的数据代码;
[0183]
根据数据代码获取测量点所对应的网格面片的法矢方向和法矢矢量的x、y、 z轴轴向数值;
[0184]
根据所获取的轴向数值驱动精度检测的测头移动。
[0185]
由于本技术的目的在于根据已知测量点的位置,确定测量点所在的网格面 片,而网格面片的数据是存储在stl文件中的,故当确定网格面片后,即可从 stl文件中获取到该网格面片的法矢方向和法矢矢量的x、y、z轴轴向数值,基 于这些数值便可以驱动精度检测的测头移动。
[0186]
通过上述技术可实现三角网格模型对应stl文件的直接数据处理操作,快 速获取测量点对应模型外形轮廓的外法矢方向,有效驱动精度检测的测头移动。
[0187]
以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本 发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的 解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具 体实施方式,这些方式都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1