基于Canny算子的电气设备红外图像边缘检测方法
基于canny算子的电气设备红外图像边缘检测方法
技术领域
1.本技术涉及图像边缘检测领域,具体地涉及一种基于canny算子的电气设备红外图像边缘检测方法。
背景技术:
2.目前,红外诊断技术已广泛应用于电力设备故障检测中,边缘检测作为提取图像感兴趣部分的传统方法之一,是电气设备红外图像预处理的重要步骤。由于实际应用中的一些客观因素的影响,如噪声和环境的干扰等,使得难于对红外图像中的感兴趣部分提取到准确、连续且封闭的边缘,这会对基于红外图像的电气设备故障识别产生影响。
3.对数字图像进行边缘检测可以提高数据处理效率,在保留图像重要结构属性的同时,减少弱相关信息,精准、清晰地提取出电气设备红外图像的轮廓,才可以进行进一步的电气设备故障识别等工作。经典的边缘检测算子有roberts、sobel、log、canny等,其中canny算法性能较高,因其高精确度的边缘检测特性而具有更好的应用潜力。但电气设备红外图像具有空间分辨率低、背景噪声大、对比度低且边缘模糊等缺陷,canny算法对于电气设备红外图像的边缘检测受噪声影响较大,易产生虚假边缘。
技术实现要素:
4.为了克服现有技术的不足,提高canny算法对于电气设备红外图像的去噪效果和边缘检测质量,本发明的目的是提出一种基于canny算子的电气设备红外图像边缘检测方法,在传统canny算法基础上,本发明考虑0
°
、90
°
、45
°
和135
°
四个方向的梯度,计算平滑图像中每个像素的梯度幅值和梯度方向,获得梯度幅值图像,再根据计算得到的梯度幅值图像计算双阈值;并采用插值方式对梯度幅值进行非极大值抑制;最后根据双阈值选择和连接边缘。解决现有技术对于电气设备红外图像的边缘检测对噪声敏感、易发生边缘信息缺失的问题。
5.为实现上述目的,本发明所采用的解决方案为:
6.一种canny算子的电气设备红外图像边缘检测方法,其包括以下步骤:
7.步骤1:对电气设备红外图像进行灰度化处理,获得灰度图像;
8.步骤2:对所述步骤1获得的灰度图像进行gamma变换获得增强后的图像f(x,y),x、y为空间坐标;
9.步骤3:利用高斯滤波器对所述步骤2获得的增强后的图像f(x,y)进行平滑降噪,获得平滑图像i(x,y);
10.步骤4:根据0
°
、90
°
、45
°
和135
°
四个方向的梯度计算所述步骤3获得的平滑图像i(x,y)中每个像素的梯度幅值和梯度方向θ(x,y),获得梯度幅值图像grad(x,y);
11.步骤5:根据所述步骤4获得的梯度幅值图像grad(x,y)获得双阈值,所述双阈值包括低阈值t
l
和高阈值t
h
,具体步骤如下:
12.步骤51:对所述步骤4获得的梯度幅值图像grad(x,y)中的梯度幅值进行统计,获
得梯度幅值的最大值f
max
和最小值f
min
,根据所述梯度幅值的最大值f
max
和最小值f
min
获得单通道像素强度的平均值m:
13.m=(f
max
+f
min
)/2
14.步骤52:根据所述步骤51获得的单通道像素强度的平均值m获得低阈值t
l
:
15.t
l
=max(0,m)
16.步骤53:根据所述步骤52获得的低阈值t
l
获得高阈值t
h
:
17.t
h
=2*t
l
;
18.步骤6:用插值方式对所述步骤4获得的梯度幅值图像grad(x,y)中的梯度幅值进行非极大值抑制,获得更新的梯度幅值图像,具体包括以下步骤:
19.步骤61:设置权重w,根据所述权重w获得所述梯度幅值图像grad(x,y)中的梯度幅值在梯度方向θ(x,y)上的插值t1和t2;
20.步骤62:将所述梯度幅值图像grad(x,y)中的梯度幅值与所述梯度幅值在梯度方向θ(x,y)上的插值t1和t2进行比较:
21.当所述梯度幅值图像grad(x,y)中的梯度幅值同时大于所述梯度幅值在梯度方向θ(x,y)上的插值t1和t2时,在所述梯度幅值图像grad(x,y)中保留所述梯度幅值;
22.否则,在所述梯度幅值图像grad(x,y)中对所述梯度幅值赋0值,获得更新的梯度幅值图像;
23.步骤7:根据所述步骤5获得的双阈值对步骤6获得的更新的梯度幅值图像选择和连接边缘,输出二值化图像,完成边缘检测。
24.可优选的是,所述步骤4具体包括以下步骤:
25.步骤41:设置0
°
、90
°
、45
°
和135
°
四个方向的模板i0°
、i
90
°
、i
45
°
、i
135
°
:
[0026][0027][0028][0029][0030]
步骤42:根据所述步骤41中四个方向的模板i0°
、i
90
°
、i
45
°
、i
135
°
的一阶偏导数的有限差分计算所述平滑图像i(x,y)中每个像素的梯度幅值和梯度方向θ(x,y),获得梯度幅值图像grad(x,y):
[0031]
θ(x,y)=arctan(i
90
°
(x,y)/i0°
(x,y))
[0032][0033]
式中:i0°
(x,y)、i
90
°
(x,y)、i
45
°
(x,y)和i
135
°
(x,y)分别为所述增强后的图像f(x,y)被0
°
、90
°
、45
°
和135
°
四个方向的模板i0°
、i
90
°
、i
45
°
和i
135
°
沿行列作用的结果。
[0034]
可优选的是,所述步骤61中的权重w为:
[0035][0036]
根据所述权重w获得所述梯度幅值图像grad(x,y)中的梯度幅值在梯度方向θ(x,y)上的插值t1和t2:
[0037]
t1=w
·
g1+(1
‑
w)
·
g2[0038]
t2=w
·
g3+(1
‑
w)
·
g4[0039]
式中:g1、g2为距离插值t1最近的像素点;g3、g4为距离插值t2最近的像素点;
[0040]
当i0°
(x,y)>i
90
°
(x,y)且i0°
(x,y)
·
i
90
°
(x,y)>0时,g1、g2、g3和g4分别为所述梯度幅值对应的像素点右上、右侧、左下和左侧的点;
[0041]
当i0°
(x,y)>i
90
°
(x,y)且i0°
(x,y)
·
i
90
°
(x,y)<0时,g1、g2、g3和g4分别为所述梯度幅值对应的像素点右下、右侧、左上和左侧的点;
[0042]
当i0°
(x,y)<i
90
°
(x,y)且i0°
(x,y)
·
i
90
°
(x,y)>0时,g1、g2、g3和g4分别为所述梯度幅值对应的像素点左下、下方、右上和上方的点;
[0043]
当i0°
(x,y)<i
90
°
(x,y)且i0°
(x,y)
·
i
90
°
(x,y)<0时,g1、g2、g3和g4分别为所述梯度幅值对应的像素点右下、下方、左上和上方的点。
[0044]
可优选的是,所述步骤2的具体步骤为:
[0045]
步骤21:对所述步骤1获得的灰度图像进行归一化操作,获得归一化后的图像g(x,y);
[0046]
步骤22:对所述步骤2获得的归一化后的图像g(x,y)进行gamma变换,获得增强后的图像f(x,y):
[0047]
f(x,y)=c
·
g
λ
(x,y)
[0048]
式中:c和λ为正常数。
[0049]
可优选的是,所述步骤3的具体步骤为:
[0050]
步骤31:利用高斯滤波器获得滤波窗口,所述高斯滤波器为二维高斯函数g(x,y):
[0051][0052]
式中:σ为高斯滤波器的标准差,用来控制滤波的平滑程度;
[0053]
步骤32:利用所述步骤31获得的滤波窗口遍历所述增强后图像f(x,y)的像素,得到平滑图像i(x,y):
[0054]
i(x,y)=g(x,y)
·
f(x,y)。
[0055]
与现有技术相比,本发明的有益效果在于:
[0056]
本发明提供了一种基于canny算子的电气设备红外图像边缘检测方法,通过对梯度幅值图像中的梯度幅值进行统计以实现高低阈值自适应,利用领域像素插值方式进行梯
度幅值的非极大值抑制,能对具有复杂背景的电气设备红外图像进行更加精准的边缘检测,解决复杂背景的干扰,有效抑制噪声,为后续电气设备故障检测等工作提供了基础。
附图说明
[0057]
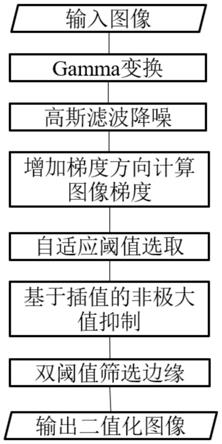
图1为本发明实施例的整体实现框图;
[0058]
图2(a)为本发明实施例的电气设备红外图像的整体图像;
[0059]
图2(b)为本发明实施例的电气设备红外图像的局部图像;
[0060]
图3(a)为本发明实施例中采用传统canny算法得到的图2(a)的边缘检测结果图;
[0061]
图3(b)为本发明实施例中采用传统canny算法得到的图2(b)的边缘检测结果图;
[0062]
图4(a)为发明本实施例中采用本发明的方法得到的图2(a)的边缘检测结果图;
[0063]
图4(b)为发明本实施例中采用本发明的方法得到的图2(b)的边缘检测结果图;
[0064]
图5为本发明实施例中采用传统canny算法和本发明的方法的评估结果对比。
具体实施方式
[0065]
以下,参照附图对本发明的实施方式进行说明。
[0066]
本发明实施例提供了一种基于canny算子的电气设备红外图像边缘检测方法,如图1所述,具体步骤包括:
[0067]
步骤1:将电气设备红外图像进行灰度化后处理后得到灰度图像;
[0068]
步骤2:对得到的灰度图像进行gamma变换得到增强后的图像,具体包括以下步骤:
[0069]
步骤21:对灰度图像进行归一化操作,得到归一化后得图像g(x,y);
[0070]
步骤22:对归一化后的图像g(x,y)进行gamma变换,得到增强后的图像f(x,y):
[0071]
f(x,y)=c
·
g
λ
(x,y)
ꢀꢀꢀ
(1)
[0072]
式中:x,y为空间坐标;c和λ为正常数;
[0073]
步骤3:用高斯滤波器对增强后的图像进行平滑降噪,得到平滑图像,具体包括以下步骤:
[0074]
步骤31:首先利用高斯滤波器得到滤波窗口,这里高斯滤波器选用二维高斯函数g(x,y):
[0075][0076]
其中:σ为高斯滤波器的标准差,用来控制滤波的平滑程度;
[0077]
步骤32:使用滤波窗口遍历增强后图像f(x,y)的像素,得到平滑图像i(x,y):
[0078]
i(x,y)=g(x,y)
·
f(x,y)
ꢀꢀꢀ
(3)
[0079]
步骤4:根据0
°
、90
°
、45
°
和135
°
四个方向的梯度计算平滑图像中的每个像素的梯度幅值图像和梯度方向,所有像素的梯度幅值构成梯度幅值图像,具体包括以下步骤:
[0080]
步骤41:四个方向的模板分别为i0°
、i
90
°
、i
45
°
、i
135
°
:
[0081]
[0082][0083][0084][0085]
步骤42:采用四个方向的模板i0°
、i
90
°
、i
45
°
、i
135
°
的一阶偏导数的有限差分计算平滑图像i(x,y)中的每个像素的梯度幅值和梯度方向为θ(x,y),获得梯度幅值图像grad(x,y):
[0086][0087]
θ(x,y)=arctan(i
90
°
(x,y)/i0°
(x,y))
ꢀꢀꢀ
(9)
[0088]
其中:i0°
(x,y)、i
90
°
(x,y)、i
45
°
(x,y)和i
135
°
(x,y)分别是增强后图像被四个方向的模板沿行列作用的结果。
[0089]
步骤5:根据计算得到的梯度幅值图像来计算双阈值,双阈值包括低阈值和高阈值,具体包括以下步骤:
[0090]
步骤51:对梯度幅值图像grad(x,y)中的梯度幅值进行统计,找出其最大值f
max
和最小值f
min
,计算出单通道像素强度的平均值m:
[0091]
m=(f
max
+f
min
)/2
ꢀꢀꢀ
(10)
[0092]
步骤52:根据单通道像素强度的平均值m计算得到低阈值t
l
:
[0093]
t
l
=max(0,m)
ꢀꢀꢀ
(11)
[0094]
步骤53:根据低阈值t
l
计算得到高阈值t
h
:
[0095]
t
h
=2*t
l
ꢀꢀꢀ
(12)
[0096]
步骤6:用插值方式对步骤4获得的梯度幅值图像grad(x,y)中的梯度幅值进行非极大值抑制,获得更新的梯度幅值图像,具体包括以下步骤:
[0097]
步骤61:对于梯度方向θ(x,y)不是0
°
、90
°
、45
°
和135
°
四个方向的梯度幅值,需要对其在梯度方向θ(x,y)上进行插值,根据权重w可得到插值t1和t2:
[0098][0099]
t1=w
·
g1+(1
‑
w)
·
g2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0100]
t2=w
·
g3+(1
‑
w)
·
g4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0101]
其中:g1、g2为距离插值t1最近的像素点;g3、g4为距离插值t2最近的像素点;
[0102]
当i0°
(x,y)>i
90
°
(x,y)且i0°
(x,y)
·
i
90
°
(x,y)>0时,g1、g2、g3和g4分别为该梯度幅值对应的像素点右上、右侧、左下和左侧的点;
[0103]
当i0°
(x,y)>i
90
°
(x,y)且i0°
(x,y)
·
i
90
°
(x,y)<0时,g1、g2、g3和g4分别为该梯度幅
值对应的像素点右下、右侧、左上和左侧的点;
[0104]
当i0°
(x,y)<i
90
°
(x,y)且i0°
(x,y)
·
i
90
°
(x,y)>0时,g1、g2、g3和g4分别为该梯度幅值对应的像素点左下、下方、右上和上方的点;
[0105]
当i0°
(x,y)<i
90
°
(x,y)且i0°
(x,y)
·
i
90
°
(x,y)<0时,g1、g2、g3和g4分别为该梯度幅值对应的像素点右下、下方、左上和上方的点。
[0106]
步骤62:对梯度幅值图像grad(x,y)中的梯度幅值与步骤61获得的该梯度幅值的插值t1和t2进行比较大小;
[0107]
当梯度幅值同时大于其插值t1和t2时,在梯度幅值图像grad(x,y)中保留该梯度幅值;
[0108]
否则,在梯度幅值图像grad(x,y)中对该梯度幅值赋0值,获得更新的梯度幅值图像;。
[0109]
步骤7:根据步骤5获得的双阈值对步骤6获得的更新的梯度幅值图像选择和连接边缘,输出二值化图像,完成边缘检测。
[0110]
为说明采用本发明的方法的有效性和准确性。从众多实验集中选取两幅电气设备红外图像进行测试,如图2
‑
5所述,采用gamma变换对图像低灰度或高灰度部分的细节进行增强;在非极大值抑制过程中采用插值方式以检测出更多真实边缘,改善边缘断裂的问题。
[0111]
图2(a)、(b)给出了两幅图像的原图,分别为含有噪声的互感器红外图像、背景复杂且对比度低的绝缘子红外图像。
[0112]
图3(a)、(b)为使用传统canny算法对图2(a)、(b)两幅图像进行边缘检测。
[0113]
图4(a)、(b)为采用本发明的方法对图2(a)、(b)两幅图像进行边缘检测。
[0114]
从图3和图4可以看出相比于传统canny算法,本发明的方法检测到的边缘连接性定位性更准确且噪声得到有效抑制。图3采用传统canny算法检测出的边缘出现伪边缘较多、边缘漏检现象,图4采用本发明的方法检测出的边缘连通性更好,能更好的抑制虚假边缘。
[0115]
为客观、量化地评估检测方法的性能,采用边缘线连接程度作为性能评判指标。边缘连接线程度n/m数值越小,则说明边缘图像的完整度越高,m为边缘点数目,n为边缘点数中符合8连通域的点数目。分别对图2中的两幅图像,求取传统canny算法与本发明的方法的边缘连接线程度n/m,评估结果如图5所述:采用本发明的方法得出的边缘检测图的n/m值明显小于采用传统canny算法得出的边缘检测图的n/m值,可以看出本发明相比于传统canny算法提高了边缘的连接性。
[0116]
与现有技术相比,本发明提出的基于canny算子的电气设备红外图像边缘检测方法,能对具有复杂背景的电气设备红外图像进行更加精准的边缘检测,解决复杂背景的干扰,有效抑制噪声,为后续电气设备故障检测等工作提供了基础。
[0117]
以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1