一种渣土车智能监测系统及方法与流程
1.本发明涉及一种渣土车智能监测系统及方法,属渣土车安全防护设备及技术领域。
背景技术:
2.随着工业化、城市化进程的加速推进,建筑业也快速发展,与大量的拆迁、建设、改造工程等项目相伴而产生的建筑垃圾日益增多,随着渣土车(混凝土车)数量大幅增加, 渣土车(混凝土车)污染环境及违规现象更是愈演愈烈,不仅存在超速、超载、超高、无证作业、不按指定线路行驶、乱倒乱放等违规现象,沿路抛、冒、撒、漏等行为更是严重污染环境,据统计每1万平方米的建筑在建设过程中就会产生500~600多吨的建筑垃圾。而建筑垃圾和工程渣土在运输过程中对城市卫生和群众生命安全带来了恶劣影响,渣土车(混凝土车)、泥头车、自卸车等无证驾驶、疲劳分心驾驶、不密闭运输、车辆带泥上路、抛洒滴漏、不遵守交通规则、不按规定路线行驶、偷倒乱倒等行为时有发生。
3.因此针对这一问题,为了提高渣土车管理水平能力及减少车辆运行事故发生概率,迫切需要开发一种全新的渣土车智能监测系统及方法,以满足实际使用的需要。
技术实现要素:
4.为了解决现有技术上的不足,本发明提供一种渣土车智能监测系统及方法,本发明监控精度高,监控数据全面,可全面对渣土车运行时的驾驶人员状态信息、车辆运行状态信息进行全面监控。
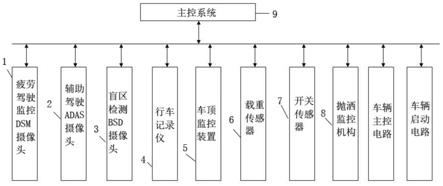
5.一种渣土车智能监测系统,包括疲劳驾驶监控dsm摄像头、辅助驾驶adas摄像头、盲区检测bsd摄像头、行车记录仪、车顶监控装置、载重传感器、开关传感器、抛洒监控机构及主控系统,疲劳驾驶监控dsm摄像头若干,嵌于车辆驾驶室内并与主控系统电气连接,辅助驾驶adas摄像头、行车记录仪均嵌于车辆外表面,并环绕车辆中心均布在同一与水平面平行分布的平面内,且辅助驾驶adas摄像头、行车记录仪光轴与水平面呈0
°
—90
°
夹角,盲区检测bsd摄像头至少两个,对称分布在车辆轴线两侧,并与主控系统电气连接,车顶监控装置与车辆顶部连接,其光轴与车辆轴线呈10
°
—60
°ꢀ
夹角并相交,载重传感器至少一个,与车辆减震器连接并与主控系统电气连接,抛洒监控机构与车辆车身连接,并与主控系统电气连接,开关传感器、主控系统均嵌于车辆主控电路内,且主控系统另分别与开关传感器、车辆行车电脑电路电气连接,开关传感器与车辆启动电路电气连接。
6.进一步的,所述的盲区检测bsd摄像头包括承载座、防护侧板、监控摄像头、补光灯、伸缩驱动机构及转台机构,其中所述承载座为轴向截面呈“匚”字形腔体结构,其轴线与车身轴线相互垂直,所述防护侧板与承载座同轴分布且轴向截面呈“匚”字形槽状结构,所述防护侧板外表面通过伸缩驱动机构与承载座侧壁内表面滑动连接,且承载座高度为承载座深度的50%—95%,所述监控摄像头至少一个,嵌于防护侧板内并与防护侧板底部连接,且所述监控摄像头轴线与防护侧板轴线相互垂直,所述补光灯若干,嵌于防护侧板前端面并
环绕防护侧板前端面中心均布,且补光灯光轴于监控摄像头光轴平行分布,所述转台机构与承载座后端面连接并同轴分布,承载座通过转台机构与车身外表面铰接,且承载座与转台机构呈0
°
—90
°
夹角,所述监控摄像头、补光灯、伸缩驱动机构及转台机构均与主控系统电气连接。
7.进一步的,所述的抛洒监控机构包括承载龙骨、监控摄像头、压力传感器、霍尔传感器、定位磁体及倾角传感器,所承载龙骨为与车辆车身同轴分布的“冂”字形槽状框架结构,且承载龙骨包覆在车厢前端面位置对应的车体外表面,所述承载龙骨前端面设横断面呈“凵”字形的检测槽,所述霍尔传感器和压力传感器均至少三个,嵌于承载龙骨顶部位置的检测槽内,并沿检测槽轴线方向均布,所述监控摄像头至少三个,环绕车身轴线均布在承载龙骨外表面,且监控摄像头光轴与承载龙骨外表面呈0
°
—60
°
夹角,所述定位磁体若干,与承载龙骨顶部的检测槽对应的车辆篷盖前端面连接,所述倾角传感器嵌于承载龙骨内,并位于承载龙骨重心位置,所述监控摄像头、压力传感器、霍尔传感器及倾角传感器均与主控电路电气连接。
8.进一步的,所述的车顶监控装置包括承载底座、监控摄像头、测距装置、检测头、警示灯,其中所述承载底座上端面与检测头连接并同轴分布,所述检测头为轴向截面呈矩形的腔体结构,所述检测头内设隔板,并通过隔板将检测头内均分为2—8个环绕检测头轴线均布的检测腔,所述监控摄像头、测距装置与检测腔数量一致,且每个检测腔内均设一个监控摄像头和一个测距装置,同一检测腔内的监控摄像头和测距装置轴线与检测头轴线垂直并相交,且各监控摄像头、测距装置间相互并联,并分别与主控系统电气连接,所述警示灯与检测头上端面连接并同轴分布,并与主控电路电气连接。
9.进一步的,所述的主控电路包括gnss卫星定位装置、渣土车智能分析仪、主动安全智能终端、中央逻辑处理电路、串口通讯电路、通讯总线电路、无线数据通讯电路、无线数据通讯天线,其中所述中央逻辑处理电路通过串口通讯电路、通讯总线电路分别与gnss卫星定位装置、渣土车智能分析仪、主动安全智能终端、无线数据通讯电路、开关传感器、车辆行车电脑电路电气连接,所述渣土车智能分析仪与载重传感器、抛洒监控机构电气连接,所述主动安全智能终端分别与疲劳驾驶监控dsm摄像头、辅助驾驶adas摄像头、盲区检测bsd摄像头及行车记录仪电气连接,所述无线数据通讯电路与至少一条无线数据通讯天线电气连接,所述无线数据通讯天线与车辆车身外表面连接。
10.进一步的,所述的中央逻辑处理电路包括基于fpga芯片的中央处理电路、基于gpu的视频处理电路、数据缓存电路、数据锁存电路、晶振时钟电路、mos驱动电路,所述基于fpga芯片的中央处理电路、基于gpu的视频处理电路间通过数据缓存电路、数据锁存电路及晶振时钟电路电气连接,且所述基于fpga芯片的中央处理电路另与mos驱动电路电气连接,所述数据缓存电路、数据锁存电路及mos驱动电路另与外部电路系统电气连接。
11.进一步的,所述的通讯总线电路为can通讯总线;所述无线数据通讯天线为gsm/gps天线;所述渣土车智能分析仪为ts
‑
zt分析仪;所述主动安全智能终端为ai
‑
box主动安全智能终端。
12.一种渣土车智能监测系统的监测方法,包括如下步骤:s1,系统组装,首先将疲劳驾驶监控dsm摄像头安装在车辆的驾驶室内,并位于驾驶位位置,然后将辅助驾驶adas摄像头、盲区检测bsd摄像头、行车记录仪安装在车辆车身
外侧面位置,将车顶监控装置安装在车辆驾驶室车顶位置;将载重传感器安装在车辆车厢位置的减震器处;将抛洒监控机构安装在车辆车厢对应的车身外表面,最后将主控系统和开关传感器均与车辆的控制电路电气连接,并使主控系统分别与开关传感器、车辆行车电脑电路、疲劳驾驶监控dsm摄像头、辅助驾驶adas摄像头、盲区检测bsd摄像头、行车记录仪、车顶监控装置、载重传感器、抛洒监控机构电气连接,将开关传感器与车辆启动电路电气连接,即可完成系统装配,同时另使主控电路通过无线通讯网络与外部的远程监控平台建立数据连接即可;s2,车辆监控,完成s1步骤即可对渣土车运行状态进行监控作业,在监控作业时:疲劳驾驶监控dsm摄像头实时监控司机状态,可识别出司机是否存在疲劳驾驶行为,对司机进行提醒,并根据司机状态向主控电路反馈控制信息,并由主控电路根据司机状态对车辆车速进行限制调整,同时将采集的驾驶人员身份信息、驾驶行为视频信息反馈至外部的远程监控平台;辅助驾驶adas摄像头和行车记录仪,一方面对驾驶人员身份信息识别,防止人员违规驾驶操控车辆,另一方面对车辆运行路径、轨迹进行全程监控引导,并对渣土车偏航等行为进行纠正和预警,同时通过主控系统将车辆运行信息反馈至外部的远程监控平台;盲区检测bsd摄像头,对车辆运行时存在的视觉盲区进行监控,并为驾驶人员提供信息显示,指导驾驶人员对车辆进行安全操控;车顶监控装置,对车辆车身外观进行360
°
范围检测监控,对车辆车身状态、车厢密封状态、车辆运行时撒漏现象进行监控作业,并将采集信息通过主控系统将车辆运行信息反馈至外部的远程监控平台;抛洒监控机构,着重对车辆车厢密封状态、车辆运行时撒漏现象进行监控作业,并将采集信息通过主控系统将车辆运行信息反馈至外部的远程监控平台;载重传感器,对车辆运行时承载量检测,并将监控数据通过主控系统将车辆运行信息反馈至外部的远程监控平台。
13.本发明辅助驾驶adas摄像头和行车记录仪,对驾驶人员身份信息识别,防止人员违规驾驶操控车辆,并对车辆运行路径、车速、轨迹进行全程监控引导,并对渣土车偏航等行为进行纠正和预警,同时通过主控系统将车辆运行信息反馈至外部的远程监控平台;通过盲区检测bsd摄像头对车辆运行时存在的视觉盲区进行监控,并为驾驶人员提供信息显示,指导驾驶人员对车辆进行安全操控。本发明一方面系统构成简单,安装维护运行灵活方便,通用性好,可有效满足多种类型渣土车辆设备及运输路况同步运行使用的需要;另一方面监控精度高,监控数据全面,可对渣土车运行时的驾驶人员状态信息、车辆运行状态信息进行全面监控,从而有效的提高了车辆运行管理的安全性和可靠性。
附图说明
14.下面结合附图和具体实施方式来详细说明本发明;图1为本发明系统结构示意图;图2为盲区检测bsd摄像头结构示意图;图3为抛洒监控机构局部结构示意图;图4为车顶监控装置结构示意图;
图5为主控电路电气原理图;图6为中央逻辑处理电路电气原理图。
15.图中各标号:疲劳驾驶监控dsm摄像头1、辅助驾驶adas摄像头2、盲区检测bsd摄像头3、行车记录仪4、车顶监控装置5、载重传感器6、开关传感器7、抛洒监控机构8、主控系统9、承载座31、防护侧板32、监控摄像头33、补光灯34、伸缩驱动机构35、转台机构36、承载龙骨81、压力传感器83、霍尔传感器84、定位磁体85、检测槽86、倾角传感器82、承载底座51、测距装置52、检测头53、警示灯54、隔板55、检测腔56。
具体实施方式
16.为使本发明实现的技术手段、创作特征、达成目的与功效易于施工,下面结合具体实施方式,进一步阐述本发明。
17.如图1所示,一种渣土车智能监测系统,包括疲劳驾驶监控dsm摄像头1、辅助驾驶adas摄像头2、盲区检测bsd摄像头3、行车记录仪4、车顶监控装置5、载重传感器6、开关传感器7、抛洒监控机构8及主控系统9,疲劳驾驶监控dsm摄像头1若干,嵌于车辆驾驶室内并与主控系统9电气连接,辅助驾驶adas摄像头2、行车记录仪4均嵌于车辆外表面,并环绕车辆中心均布在同一与水平面平行分布的平面内,且辅助驾驶adas摄像头2、行车记录仪4光轴与水平面呈0
°
—90
°
夹角,盲区检测bsd摄像头3至少两个,对称分布在车辆轴线两侧,并与主控系统9电气连接,车顶监控装置5与车辆顶部连接,其光轴与车辆轴线呈10
°
—60
°ꢀ
夹角并相交,载重传感器6至少一个,与车辆减震器连接并与主控系统9电气连接,抛洒监控机构8与车辆车身连接,并与主控系统9电气连接,开关传感器7、主控系统9均嵌于车辆主控电路内,且主控系统9另分别与开关传感器7、车辆行车电脑电路电气连接,开关传感器7与车辆启动电路电气连接。
18.如图2所示,所述的盲区检测bsd摄像头3包括承载座31、防护侧板32、监控摄像头33、补光灯34、伸缩驱动机构35及转台机构36,其中所述承载座31为轴向截面呈“匚”字形腔体结构,其轴线与车身轴线相互垂直,所述防护侧板32与承载座31同轴分布且轴向截面呈“匚”字形槽状结构,所述防护侧板32外表面通过伸缩驱动机构35与承载座31侧壁内表面滑动连接,且承载座31高度为承载座31深度的50%—95%,所述监控摄像头33至少一个,嵌于防护侧板32内并与防护侧板32底部连接,且所述监控摄像头33轴线与防护侧板32轴线相互垂直,所述补光灯34若干,嵌于防护侧板32前端面并环绕防护侧板32前端面中心均布,且补光灯34光轴于监控摄像头33光轴平行分布,所述转台机构36与承载座31后端面连接并同轴分布,承载座31通过转台机构36与车身外表面铰接,且承载座31与转台机构36呈0
°
—90
°
夹角,所述监控摄像头33、补光灯34、伸缩驱动机构35及转台机构36均与主控系统9电气连接。
19.进一步优化的,所述伸缩驱动机构35为电动伸缩杆、齿轮齿条机构、液压伸缩杆、气压伸缩杆中的任意一种。
20.盲区检测bsd摄像头3在运行时,首先通过伸缩驱动机构35调整防护侧板32从承载座31中的伸出量,调节监控摄像头33在水平方向上的工作位置,然后通过转台机构36驱动承载座31及与承载座31联机的防护侧板32,调节监控摄像头33光轴与水平面间的夹角,从而达到调整盲区检测bsd摄像头3的位置以满足不同路况及车型盲区监控作业的需要,并在盲区检测bsd摄像头3处于待机状态及外部环境较为恶劣时,将监控摄像头33收纳到承载座
31内,对监控摄像头33进行保护,提高监控摄像头33的使用可靠性。
21.如图3所示,所述的抛洒监控机构8包括承载龙骨81、监控摄像头33、压力传感器83、霍尔传感器84、定位磁体85及倾角传感器82,所承载龙骨81为与车辆车身同轴分布的“冂”字形槽状框架结构,且承载龙骨81包覆在车厢前端面位置对应的车体外表面,所述承载龙骨81前端面设横断面呈“凵”字形的检测槽86,所述霍尔传感器84和压力传感器83均至少三个,嵌于承载龙骨81顶部位置的检测槽86内,并沿检测槽86轴线方向均布,所述监控摄像头82至少三个,环绕车身轴线均布在承载龙骨81外表面,且监控摄像头33光轴与承载龙骨81外表面呈0
°
—60
°
夹角,所述定位磁体85若干,与承载龙骨81顶部的检测槽86对应的车辆篷盖前端面连接,所述倾角传感器82嵌于承载龙骨81内,并位于承载龙骨81重心位置,所述监控摄像头33、压力传感器83、霍尔传感器84及倾角传感器82均与主控电路9电气连接。
22.如图4所示,所述的车顶监控装置5包括承载底座51、监控摄像头33、测距装置52、检测头53、警示灯54,其中所述承载底座51上端面与检测头53连接并同轴分布,所述检测头53为轴向截面呈矩形的腔体结构,所述检测头53内设隔板55,并通过隔板55将检测头53内均分为2—8个环绕检测头53轴线均布的检测腔56,所述监控摄像头33、测距装置52与检测腔56数量一致,且每个检测腔56内均设一个监控摄像头33和一个测距装置52,同一检测腔56内的监控摄像头33和测距装置52轴线与检测头53轴线垂直并相交,且各监控摄像头33、测距装置52间相互并联,并分别与主控系统9电气连接,所述警示灯54与检测头53上端面连接并同轴分布,并与主控电路9电气连接。
23.如图5所示,所述的主控电路9包括gnss卫星定位装置、渣土车智能分析仪、主动安全智能终端、中央逻辑处理电路、串口通讯电路、通讯总线电路、无线数据通讯电路、无线数据通讯天线,其中所述中央逻辑处理电路通过串口通讯电路、通讯总线电路分别与gnss卫星定位装置、渣土车智能分析仪、主动安全智能终端、无线数据通讯电路、开关传感器7、车辆行车电脑电路电气连接,所述渣土车智能分析仪与载重传感器6、抛洒监控机构8电气连接,所述主动安全智能终端分别与疲劳驾驶监控dsm摄像头1、辅助驾驶adas摄像头2、盲区检测bsd摄像头3及行车记录仪4电气连接,所述无线数据通讯电路与至少一条无线数据通讯天线电气连接,所述无线数据通讯天线与车辆车身外表面连接。
24.如图6所示,所述的中央逻辑处理电路包括基于fpga芯片的中央处理电路、基于gpu的视频处理电路、数据缓存电路、数据锁存电路、晶振时钟电路、mos驱动电路,所述基于fpga芯片的中央处理电路、基于gpu的视频处理电路间通过数据缓存电路、数据锁存电路及晶振时钟电路电气连接,且所述基于fpga芯片的中央处理电路另与mos驱动电路电气连接,所述数据缓存电路、数据锁存电路及mos驱动电路另与外部电路系统电气连接。
25.通讯总线电路为can通讯总线;所述无线数据通讯天线为gsm/gps天线;所述渣土车智能分析仪为ts
‑
zt分析仪;所述主动安全智能终端为ai
‑
box主动安全智能终端。
26.一种渣土车智能监测系统的监测方法,包括如下步骤:s1,系统组装,首先将疲劳驾驶监控dsm摄像头1安装在车辆的驾驶室内,并位于驾驶位位置,然后将辅助驾驶adas摄像头2、盲区检测bsd摄像头3、行车记录仪4安装在车辆车身外侧面位置,将车顶监控装置5安装在车辆驾驶室车顶位置;将载重传感器6安装在车辆车厢位置的减震器处;将抛洒监控机构8安装在车辆车厢对应的车身外表面,最后将主控系统9和开关传感器7均与车辆的控制电路电气连接,并使主控系统9分别与开关传感器7、车
辆行车电脑电路、疲劳驾驶监控dsm摄像头1、辅助驾驶adas摄像头2、盲区检测bsd摄像头3、行车记录仪4、车顶监控装置5、载重传感器6、抛洒监控机构8电气连接,将开关传感器7与车辆启动电路电气连接,即可完成系统装配,同时另使主控电路通过无线通讯网络与外部的远程监控平台建立数据连接即可;s2,车辆监控,完成s1步骤即可对渣土车运行状态进行监控作业,在监控作业时:疲劳驾驶监控dsm摄像头1实时监控司机状态,可识别出司机是否存在疲劳驾驶行为,对司机进行提醒,并根据司机状态向主控电路反馈控制信息,并由主控电路根据司机状态对车辆车速进行限制调整,同时将采集的驾驶人员身份信息、驾驶行为视频信息反馈至外部的远程监控平台;辅助驾驶adas摄像头2和行车记录仪4,一方面对驾驶人员身份信息识别,防止人员违规驾驶操控车辆,另一方面对车辆运行路径、轨迹进行全程监控引导,并对渣土车偏航等行为进行纠正和预警,同时通过主控系统9将车辆运行信息反馈至外部的远程监控平台;盲区检测bsd摄像头3,对车辆运行时存在的视觉盲区进行监控,并为驾驶人员提供信息显示,指导驾驶人员对车辆进行安全操控;车顶监控装置5,对车辆车身外观进行360
°
范围检测监控,对车辆车身状态、车厢密封状态、车辆运行时撒漏现象进行监控作业,并将采集信息通过主控系统9将车辆运行信息反馈至外部的远程监控平台;抛洒监控机构8,着重对车辆车厢密封状态、车辆运行时撒漏现象进行监控作业,并将采集信息通过主控系统9将车辆运行信息反馈至外部的远程监控平台;载重传感器6,对车辆运行时承载量检测,并将监控数据通过主控系统9将车辆运行信息反馈至外部的远程监控平台。
27.本发明一方面系统构成简单,安装维护运行灵活方便,通用性好,可有效满足多种类型渣土车辆设备及运输路况同步运行使用的需要;另一方面监控精度高,监控数据全面,可全面对渣土车运行时的驾驶人员状态信息、车辆运行状态信息进行全面监控,从而有效的提高了车辆运行管理的安全性和可靠性。
28.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1