一种回旋加速器中心区电聚焦的计算方法与流程
1.本发明属于回旋加速器技术领域,尤其涉及一种回旋加速器中心区电聚焦的计算方法。
背景技术:
2.在一般的回旋加速器设计中采用对称的加速间隙结构如图2所示,h1和 h2相等。束流在经过加速间隙时,电场会对束流在高度方向上提供聚焦力如图1所示。根据聚焦力公式,可以通过调节加速间隙高度来调整聚焦的强弱,高度越低,聚焦越强。但是这种方法存在限制,因为束流在加速缝隙中的前半部分方向是向下的聚焦的、后半部分方向是向上的散焦的,方向向下的部分更加趋进于加速器中心平面,而方向向上的部分电场越强则散焦越强、距离加速器中心平面越远。
3.基于加速缝隙中的束流在前半部分聚焦、后半部分散焦的情况,曾经有人猜想,将前半部分束流入口处的缝隙低一些,后半部分束流出口处的缝隙高度高一些,用以提高前半部分的聚焦力、弱化后半部分的散焦力。
4.但仅仅是猜想则不能真正实施,因为这种猜想,第一没有经过验证,第二尺度不容易把握。低入口高出口是一个大的范围,究竟低入口低到什么程度、高出口高到什么程度,应该用轴向聚焦力值作为标准,并且,该轴向聚焦力值还会因为要兼顾束流自身的高度、加速器其它元器件对空间占用而不断进行调整:调整的原因是因为束流自身存在高度,所以加速间隙高度不能太低、要保证足够的空间供束流通过,同时受到加速器其他元件结构的限制,加速间隙的高度也不能太高。兼顾以上轴向聚焦力、束流自身高度、其他元器件影响三者需求的关键步骤是找到一种计算中心区电聚焦力的计算方法。
5.解决独立计算电聚焦力的另一层意义在于:从加速器小半径到大半径的地带,电聚焦由大变小,磁聚焦由小变大,这就不难想象在它们的中间地带有一个区间电场和磁场的总聚焦能力达到最小,就会发生粒子丢失的情况。因此要通过计算电聚焦力的方法找到这个总聚焦能力最低的区间,用增加该地方磁场聚焦力的方法来增强局部聚焦。因此同样需要单独计算电聚焦力。
6.但现有技术对于轴向聚焦力的判定结果,均包括了磁场的贡献和电场的贡献,是两种场混合作用的结果,而没有一种单独计算电聚焦力的方法,由于不能解决独立计算电聚焦力的算法问题,因此对中心区影响电聚焦力的因素判断不准确,使得低入口、高出口的不对称加速间隙结构仍然只是停留在猜想上而得不到实施,致使中心区高度方向聚焦力不足的问题始终不能解决,同样,对于加速器半径方向电场和磁场均为零的地方也无能为力,致使一部分粒子在这个地带有可能损失掉。
技术实现要素:
7.本发明为解决现有技术存在的问题,提出一种回旋加速器中心区电聚焦的计算方法,目的在于解决现有技术没有一种单独计算电聚焦力的方法,而使得加速器中心区的轴
向聚焦力不能得到提高、以及加速器沿着半径电场和磁场为零的地带,粒子会发生丢失的问题。
8.本发明为解决其技术问题,采用以下技术方案:
9.一种回旋加速器中心区电聚焦的计算方法,其特点是:包括以下步骤:
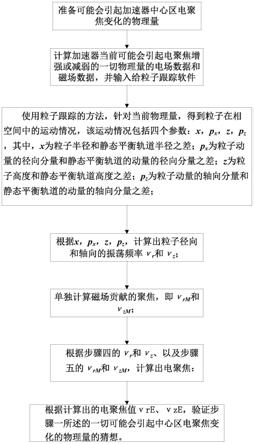
10.步骤一:准备可能会引起加速器中心区电聚焦变化的物理量;
11.所述物理量是一种猜想的、非确定的、来自加速器中心区相关部件的可能会引起电聚焦增强或减弱的一切物理量;
12.步骤二、计算加速器当前可能会引起电聚焦增强或减弱的一切物理量的电场数据和磁场数据,并输入给粒子跟踪软件;
13.步骤三、使用粒子跟踪的方法,针对当前物理量,得到粒子在相空间中的运动情况,该运动情况包括四个参数:x,p
x
,z,p
z
,其中,x为粒子半径和静态平衡轨道半径之差;p
x
为粒子动量的径向分量和静态平衡轨道的动量的径向分量之差;z为粒子高度和静态平衡轨道高度之差;p
z
为粒子动量的轴向分量和静态平衡轨道的动量的轴向分量之差;
14.步骤四、根据x,p
x
,z,p
z
,计算出粒子径向和轴向的振荡频率ν
r
和ν
z
;
15.该ν
r
和ν
z
表示粒子在加速器内旋转1圈时,径向和轴向振荡的周期数,常用振荡频率描述回旋加速器的聚焦能力,聚焦能力越强,振荡频率越大;
16.步骤五、单独计算磁场贡献的聚焦,即ν
rm
和ν
zm
;
17.步骤六、根据步骤四的ν
r
和ν
z
、以及步骤五的ν
rm
和ν
zm
,计算出电聚焦:
[0018][0019]
所述ν
re
为中心区径向电聚焦,所述ν
ze
为中心区轴向电聚焦;
[0020]
步骤七、根据计算出的电聚焦值ν
re
、ν
ze
,验证步骤一所述的一切可能会引起中心区电聚焦变化的物理量的猜想。
[0021]
所述步骤一的可能会引起中心区电聚焦变化的物理量,包括位于加速器中心区平面上下两侧的由上法兰和下法兰组成的束流入口的高度或宽度、以及位于加速器中心区平面上下两侧的由上高频腔和下高频腔组成的束流出口的高度或宽度;还包括位于加速器中心区平面上下两侧的由上高频腔和下高频腔组成的束流入口的高度或宽度、以及位于加速器中心区平面上下两侧由上法兰和下法兰组成的束流出口的高度或宽度,这些高度或宽度的变化均会引起轴向电聚焦的变化。
[0022]
所述步骤四的轴向振荡频率ν
z
的计算如下:
[0023][0024]
其中,为粒子在这段时间内在相空间所转的角度;δθ为为粒子在这段时间在加速器中旋转的角度;将二个相除,就得到粒子的轴向振荡频率ν
z
;
[0025]
设在回旋加速器某一方位角θ1处,粒子在轴向相空间的坐标为(z1,p
z1
);当粒子旋转至θ2处,粒子在轴向相空间的坐标为(z2,p
z2
),那么该粒子在轴向相空间旋转的角度为:
[0026]
[0027]
所述步骤五的径向振荡频率ν
r
的计算如下:
[0028]
在磁场沿方位角调变的avf回旋加速器中,磁场贡献的部分可用公式计算:
[0029][0030]
n是磁降落指数:
[0031][0032]
f是磁场的调变度:
[0033][0034]
b是磁场,是该半径下的平均场;r是半径。
[0035]
所述步骤六电聚焦力ν
ze
推导如下:
[0036]
1)粒子轴向运动为简谐运动:
[0037]
2)对上述公式求解:k=ω2=(υ
z
ω0)2;
ꢀꢀ
(2)
[0038]
υ
z
用于描述电聚焦和磁聚焦同时作用时的粒子的轴向自由振荡频率,其中,ω=υ
z
ω0是根据回旋加速器自由振荡频率υ的定义;
[0039]
ω0是粒子在加速器中旋转的角频率=2π/t,k和聚焦力成正比
[0040][0041]
ω
e
为电聚焦使粒子在轴向相空间运动的角频率;
[0042]
ω
m
为磁聚焦使粒子在轴向相空间运动的角频率;
[0043]
由于:k=ω2、ω是电聚焦和磁聚焦同时作用时,粒子在轴向相空间运动的角频率;
[0044]
所以:
[0045]
根据回旋加速器自由振荡频率υ的定义:
[0046]
得到:ω
e
=υ
e
ω0,ω
m
=υ
m
ω0;
ꢀꢀ
(5)
[0047]
将(5)式代入(4)右边,(2)式代入(4)式左边,然后各项消除ω
02
[0048]
得到:
[0049]
所以:
[0050]
本发明的优点效果
[0051]
本发明用于回旋加速器中心区电聚焦的计算方法,将多种不对称加速结构的猜想用相关算法进行验证,得到一个专门针对电场变化的电聚焦力算法,从而有效测量了各种不对称结构对于电聚焦力的影响,从中找出一个能够兼顾中心区轴向聚焦力、束流自身高度、其它元器件影响三者平衡点的不对称加速间隙结构,解决了长期以来由于不能独立计算电聚焦力、致使对中心区影响电聚焦力的因素判断不准确、中心区高度方向聚焦力不足的问题,同时根据ν
ze
的计算结果优化磁场,使ν
z
在最小值附近也保持足够的聚焦能力。
附图说明
[0052]
图1为束流经过加速器间隙时受到的电场力的情况;
[0053]
图2为现有技术加速间隙同等高度的情况;
[0054]
图3为粒子在轴向相空间的运动情况;
[0055]
图4为本发明中心区电聚焦算法流程图;
[0056]
图5为本发明不对称加速间隙结构俯视图;
[0057]
图6
‑
1为图5中a
‑
a剖面图且低入高出对称斜面组合示意图;
[0058]
图6
‑
2为图5中a
‑
a剖面图且低入高出不对称斜面或平面组合示意图;
[0059]
图6
‑
3为图5中a
‑
a剖面图且入口高度不同、或者出口高度不同示意图;
[0060]
图中,1
‑
1:上法兰;1
‑
2:下法兰;2
‑
1:上高频腔体;2
‑
2:下高频腔体; 3:加速间隙。h1:图5的逆时针第1加速间隙入口;h2:图5的逆时针第1 加速间隙出口;h3:图5的逆时针第2加速间隙入口;h4:图5的逆时针第2 加速间隙出口。
具体实施方式
[0061]
本发明设计原理
[0062]
1.本发明的贡献在于找出了一种能够将电聚焦力υ
ze
从包含了电场聚焦力和磁场聚焦力的υ
z
中分离出来的计算方法。该计算方法建立了υ
ze
和υ
z
以及υ
zm
三者之间的关系:该关系式的推导详见后面的推导公式(1)到(7)。
[0063]
2.建立三者之间的关系以后还需要计算出υ
z
、υ
zm
;
[0064]
υ
z
的计算:υ
z
的计算采用间接而非直接地借用了粒子跟踪软件的输出值z, pz,再通过υ
z
的定义建立υ
z
和z,p
z
的关系式,最后计算出υ
z
;
[0065]
υ
zm
的计算:同样采用现有的软件计算;
[0066]
3.建立加速器中心区可能会引起电聚焦增强或减弱的一切物理量和第三方粒子跟踪软件的关系:通过电场分布和磁场分布建立它们之间的关系:在设计阶段,该物理量包括加速器中心区加速间隙两侧入口和出口的位置、或者包括沿着加速器半径方向电场下降几乎为零且磁场上升几乎为零的位置,计算出这些物理量相应的电场分布和磁场分布,再将该电场分布和磁场分布情况输入到软件中。并根据可能会引起电聚焦增强或减弱的一切物理量在加速器中的分布位置,到软件输出结果中找到相应位置内的输出结果值。
[0067]
本发明的设计难点
[0068]
难点在于不容易做到。不对称加速间隙结构只是对于电场聚焦力产生影响,但是现有的聚焦力计算结果υ
z
都是包含了电场和磁场共同作用的结果,输入到粒子跟踪软件中的数据包括磁场分布和电场分布两种数据,因为不能确定当前轴向聚焦力的变化仅仅是电场的变化而不包括磁场的变化,所以两种场的分布数据均要输入粒子跟踪软件,这就导致根据粒子跟踪软件输出值z、 pz计算出来的υ
z
包含了电场和磁场共同作用的频率变化。
[0069]
基于以上原理,本发明设计了一种回旋加速器中心区电聚焦的计算方法。一种回旋加速器中心区电聚焦的计算方法如图4所示,其特点是:包括以下步骤:
[0070]
步骤一:准备可能会引起加速器中心区电聚焦变化的物理量;
[0071]
所述物理量是一种猜想的、非确定的、来自加速器中心区相关部件的可能会引起
电聚焦增强或减弱的一切物理量;
[0072]
步骤二、计算加速器当前可能会引起电聚焦增强或减弱的一切物理量的电场数据和磁场数据,并输入给粒子跟踪软件;
[0073]
步骤三、使用粒子跟踪的方法,针对当前物理量,得到粒子在相空间中的运动情况,该运动情况包括四个参数:x,p
x
,z,p
z
,其中,x为粒子半径和静态平衡轨道半径之差;p
x
为粒子动量的径向分量和静态平衡轨道的动量的径向分量之差;z为粒子高度和静态平衡轨道高度之差;p
z
为粒子动量的轴向分量和静态平衡轨道的动量的轴向分量之差;
[0074]
图3为粒子在轴向相空间中的运动情况。
[0075]
步骤四、根据x,p
x
,z,p
z
,计算出粒子径向和轴向的振荡频率ν
r
和ν
z
;
[0076]
该ν
r
和ν
z
表示粒子在加速器内旋转1圈时,径向和轴向振荡的周期数,常用振荡频率描述回旋加速器的聚焦能力,聚焦能力越强,振荡频率越大;
[0077]
步骤五、单独计算磁场贡献的聚焦,即ν
rm
和ν
zm
;
[0078]
步骤六、根据步骤四的ν
r
和ν
z
、以及步骤五的ν
rm
和ν
zm
,计算出电聚焦:
[0079][0080]
所述ν
re
为中心区径向电聚焦,所述ν
ze
为中心区轴向电聚焦;
[0081]
步骤七、根据计算出的电聚焦值ν
re
、ν
ze
,验证步骤一所述的一切可能会引起中心区电聚焦变化的物理量的猜想。
[0082]
所述步骤一的可能会引起中心区电聚焦变化的物理量,包括位于加速器中心区平面上下两侧的由上法兰和下法兰组成的束流入口的高度或宽度、以及位于加速器中心区平面上下两侧的由上高频腔和下高频腔组成的束流出口的高度或宽度;还包括位于加速器中心区平面上下两侧的由上高频腔和下高频腔组成的束流入口的高度或宽度、以及位于加速器中心区平面上下两侧由上法兰和下法兰组成的束流出口的高度或宽度,这些高度或宽度的变化均会引起轴向电聚焦的变化。
[0083]
所述步骤四的轴向振荡频率ν
z
的计算如下:
[0084][0085]
其中,为粒子在这段时间内在相空间所转的角度;δθ为为粒子在这段时间在加速器中旋转的角度;将二个相除,就得到粒子的轴向振荡频率ν
z
;
[0086]
设在回旋加速器某一方位角θ1处,粒子在轴向相空间的坐标为(z1,p
z1
);当粒子旋转至θ2处,粒子在轴向相空间的坐标为(z2,p
z2
),那么该粒子在轴向相空间旋转的角度为:
[0087][0088]
所述步骤五的径向振荡频率ν
r
的计算如下:
[0089]
在磁场沿方位角调变的avf回旋加速器中,磁场贡献的部分可用公式计算:
[0090]
[0091]
n是磁降落指数:
[0092][0093]
f是磁场的调变度:
[0094][0095]
b是磁场,是该半径下的平均场;r是半径。
[0096]
所述步骤六电聚焦力ν
ze
推导如下:
[0097]
1)粒子轴向运动为简谐运动:
[0098]
2)对上述公式求解:k=ω2=(υ
z
ω0)2;
ꢀꢀ
(2)
[0099]
υ
z
用于描述电聚焦和磁聚焦同时作用时的粒子的轴向自由振荡频率,其中,ω=υ
z
ω0是根据回旋加速器自由振荡频率υ的定义;
[0100]
ω0是粒子在加速器中旋转的角频率=2π/t,k和聚焦力成正比
[0101][0102]
ω
e
为电聚焦使粒子在轴向相空间运动的角频率;
[0103]
ω
m
为磁聚焦使粒子在轴向相空间运动的角频率;
[0104]
由于:k=ω2、ω是电聚焦和磁聚焦同时作用时,粒子在轴向相空间运动的角频率;
[0105]
所以:
[0106]
根据回旋加速器自由振荡频率υ的定义:
[0107]
得到:ω
e
=υ
e
ω0,ω
m
=υ
m
ω0;
ꢀꢀ
(5)
[0108]
将(5)式代入(4)右边,(2)式代入(4)式左边,然后各项消除ω
02
[0109]
得到:
[0110]
所以:
[0111]
实施例一
[0112]
一种基于回旋加速器中心区电聚焦计算方法的不对称加速间隙结构设计方法,该设计方法基于一种中心区加速间隙结构如图5、图6
‑
1、6
‑
2、6
‑
3所示,该结构包括沿着加速器圆周方向布设在加速器中心平面上下两侧的上法兰1
‑
1和下法兰1
‑
2,上下法兰之间沿着180度对称开设的两个高频腔豁口、以及布设在每个高频腔豁口中的高频腔体,每个180度对称的高频腔两侧分别设有二个入口h1、h3,二个出口h2、h4;每个高频腔体沿着加速器中心平面分为上高频腔体2
‑
1、下高频腔体2
‑
2;该二个180度对称的两个高频腔豁口中的上下高频腔体和腔体两侧的上下法兰之间的缝隙为加速间隙;
[0113]
其特点是:该不对称加速间隙结构设计方法包括以下步骤:
[0114]
步骤一、设定加速器中心区的多种类入口高度小于出口高度的不对称加速间隙结构;
[0115]
步骤二、设定当前不对称加速间隙结构的各个物理量:该各个物理量为每个高频腔两侧的每个入口、出口物理量h1和h2,h3和h4;
[0116]
步骤三、计算加速器当前包含了每个不对称加速间隙结构的电场数据和磁场数据,并输入给粒子跟踪软件;所述每个不对称加速间隙结构为h1和h2,或者h3和h4;
[0117]
步骤四、采用中心区电聚焦计算方法计算轴向电聚焦值νze12和νze34;所述轴向电聚焦值νze12是针对入口h1和出口h2的轴向电聚焦值:所述轴向电聚焦值νze34是针对入口h3和出口h4的轴向电聚焦值;
[0118]
步骤五、若加速间隙的各个轴向电聚焦值νze12、νze34满足设定轴向电聚焦值范围,则与νze12、νze34相匹配的每个入口和出口的不对称加速间隙结构符合设计要求;
[0119]
步骤六、返回步骤二,继续获取下一种类的不对称加速间隙结构,直至将步骤一设定的所有不对称加速间隙结构计算完毕,从中确定所有符合设计要求的不对称加速间隙结构。
[0120]
所述步骤一的不对称加速间隙结构如图6
‑
1所示,包括:所述束流入口处的上法兰1
‑
1的下表面和下法兰1
‑
2的上表面为对称的斜面、束流出口处的上高频腔体2
‑
1的下表面和下高频腔体2
‑
2的上表面之间为对称的斜面,且束流入口处的间隙h1小于束流出口处的间隙h2。
[0121]
所述步骤一的不对称加速间隙结构如图6
‑
2所示,包括:所述束流入口处的上法兰1
‑
1的下表面和下法兰1
‑
2的上表面为平行平面、束流出口处的上高频腔体2
‑
1的下表面和下高频腔体2
‑
2的上表面之间为不对称的斜面,且束流入口处的间隙h1小于束流出口处的间隙h2。
[0122]
所述步骤一的不对称加速间隙结构如图6
‑
2所示,包括:所述束流入口处的上高频腔体2
‑
1的下表面和下高频腔体2
‑
2的上表面为不对称的斜面、束流出口处的上法兰2
‑
1的下表面和下法兰1
‑
2的上表面为一平面一斜面,且束流入口处的间隙h3小于束流出口处的间隙h4。
[0123]
所述步骤一的不对称加速间隙结构包括:每个高频腔两侧的二个入口h1、 h3的高度一致,且二个出口h2、h4的高度一致,且二个入口的高度均小于二个出口h2、h4的高度。
[0124]
所述步骤一的不对称加速间隙结构如图6
‑
3所示,包括:每个高频腔两侧的二个入口h1、h3的高度不一致,且二个出口h2、h4的高度不一致,且二个入口的高度均小于二个出口h2、h4的高度。
[0125]
需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明包括并不限于具体实施方式中所述的实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1