一种抽油机有效冲程的计算方法与流程
1.本发明涉及基于油田量油技术领域,具体而言,是通过深度学习技术,建立数据驱动的回归模型,从而预测抽油机井有效冲程的方法。
背景技术:
2.在油田开采过程中,油井产量计量是油田日常生产管理的一项基础且重要的工作,目前国内外传统的计量方式是将各井口的产油输送到计量站进行集中计量,这一计量方式存在安装设备繁多、工艺流程冗杂、实时性低等问题,难以满足智慧油田的发展需求。在这种需求下,功图量油成为替代目前计量站形式量油的主要手段。
3.功图量油是通过对油井示功图的实时采集和处理分析来计算油井产液量的,而柱塞有效冲程的计算直接影响功图量油的准确性。柱塞有效冲程由抽油泵固定凡尔和游动凡尔的开启、关闭四个关键点所决定。四个凡尔开闭点的求解,目前工业中普遍采用五点平均法,该方法通过计算功图中每个采样点的平均曲率变化值,并分别将功图上、下冲程中曲率变化最大的两个采样点作为凡尔开闭点。五点平均法在工程应用中具有计算简单和实时性好的优点,但同时也存在着对噪声干扰敏感和对功图完整性要求高的缺点。在油田实际开采过程中,噪声影响和极端故障导致的功图不规整、毛刺多和曲率变化波动大的情况时有发生,此时五点平均法会出现计算误差大,可靠性降低,甚至难以使用的情况。
4.近年来,随着数据驱动技术的快速发展,将深度学习等人工智能技术应用于油田生产开采过程,有望为解决上述问题提供另一种新的思路,为准确定位凡尔开闭点从而计算有效冲程和油井产量提供技术支撑。
技术实现要素:
5.针对上述问题,本发明提供一种抽油机有效冲程的计算方法,通过示功图的历史采样数据训练卷积神经网络回归模型,对抽油机的示功图凡尔开闭点进行实时检测,从而预测示功图的有效冲程,具有计算流程简单、实时性高和泛化能力强等特点。
6.本发明提出一种抽油机有效冲程的计算方法,具有如下步骤:
7.(1)获取油井现场采集到的抽油机示功图历史数据并对其进行异常数据过滤处理,得到有效工况数据集d:
8.d={d
i
|i=1,2,...,n}
9.d
i
={(x
ij
,y
ij
)|j=1,2,...,m}
10.其中d
i
表示第i组抽油机示功仪采样数据,共n组;其中每组数据包含m对抽油机悬点位移和载荷采样值(x
ij
,y
ij
),x
ij
表示第j个悬点位移采样值,y
ij
表示第j个悬点载荷采样值;
11.(2)将有效工况数据归一化并绘制为闭合的示功图图像,得到有效示功图数据集p:
12.p={p
i
|i=1,2,...,k}
13.其中p
i
表示由第i组抽油机示功仪采样数据d
i
绘制成的示功图样本,共k个;
14.(3)由工艺专家为示功图数据集p标定与有效冲程相关的四个凡尔开闭点作为数据集p的标签l:
15.l={l
i
|i=1,2,...,k}
16.l
i
={a
ia
,b
ia
,a
ib
,b
ib
,a
ic
,b
ic
,a
id
,b
id
}
17.其中l
i
表示第i组抽油机示功图样本p
i
的标签,共k组;其中每组标签包含4个凡尔开闭点在示功图中的像素坐标值,分别为固定凡尔开启点a的坐标(a
ia
,b
ia
)、固定凡尔关闭点b的坐标(a
ib
,b
ib
)、游动凡尔开启点c的坐标(a
ic
,b
ic
)和游动凡尔关闭点d的坐标(a
id
,b
id
);
18.(4)将示功图数据集p按照留出法划分为训练集p
train
、验证集p
val
和测试集p
test
,对应的标签l也被划分为训练集标签l
train
、验证集l
val
和测试集l
test
;
19.(5)根据凡尔开闭点识别任务的特性,选取神经网络回归模型m;
20.(6)利用训练集p
train
,结合对应的训练集标签l
train
,对神经网络回归模型m进行示功图到凡尔开闭点位置的映射关系的学习;
21.(7)根据神经网络回归模型m训练过程中,在验证集p
val
上的损失函数的最小值选取模型的权重参数;
22.(8)通过测试集p
test
评估(7)中已确定网络权重参数的回归模型m的泛化能力,并根据测试结果挖掘困难样本,针对困难样本调整神经网络回归模型m的网络结构以达到提高回归模型性能的目的;
23.(9)重复步骤(6)至步骤(8)直至回归模型m的性能达到工程应用要求,获得神经网络回归模型m;
24.(10)获取油井现场采集到的实时悬点位移及载荷并对其进行异常数据过滤和归一化处理,将结果绘制成示功图输入至神经网络回归模型m,根据模型m输出的凡尔开闭点像素坐标和归一化相关参数反推出实际有效冲程。
25.进一步地,所述获取油井现场采集到的抽油机示功图历史数据并对其进行异常数据过滤处理具有如下步骤:
26.(1
‑
1)将超出示功仪位移及载荷量程或空值数据定义为异常数据,统计一组示功图据中异常数据的占比α
error
:
[0027][0028]
其中n
erroe
表示异常数据点个数,n
all
表示采样总数;
[0029]
(1
‑
2)若α
error
大于设定阈值则丢弃当前样本;
[0030]
(1
‑
3)若α
error
小于设定阈值则采用如下策略对异常采样点p
error
(x
error
,y
error
)进行修正:
[0031][0032]
其中(x
pre
,y
pre
)表示(x
error
,y
error
)的前一个有效采样点,(x
after
,y
after
)表示(x
error
,y
error
)的后一个有效采样点。
[0033]
进一步的,所述有效工况数据归一化并将其绘制为示功图图像具有如下步骤:
[0034]
(2
‑
1)设定每台抽油机设备的示功图坐标系以其生产参数的最大载荷y
max
为纵轴最大量程,以最大冲程x
max
为横轴最大量程,对示功图原始二维数据进行坐标归一化,将原始数据转换到[0,1]的范围内,归一化结果如下:
[0035]
d
norm_i
={(x
norm_ij
,y
norm_ij
)|j=1,2,...,m}
[0036]
其中:
[0037][0038]
(2
‑
2)根据归一化结果映射到w
×
h的网格中并进行向下取整,映射结果d
map_i
如下:
[0039]
d
map_i
={(x
map_ij
,y
map_ij
)|j=1,2,...,m}
[0040]
其中:
[0041]
(x
map_ij
,y
map_ij
)=(x
norm_ij
,y
norm_ij
)
×
(w,h)
[0042]
(2
‑
3)根据(2
‑
2)中的映射结果绘制示功图图像,绘制时以归一化并映射后的悬点位移x
map_ij
为图像的横坐标,以归一化后的悬点载荷y
map_ij
为图像的纵坐标,将(x
map_i1
,y
map_i1
)与其后的一个点相连,并以此类推,将数据点两两相连至最后一点(x
map_im
,y
map_im
),再将(x
map_im
,y
map_im
)与(x
map_i1
,y
map_i1
)相连,形成示功图封闭曲线,示功图大小为w
×
h。
[0043]
进一步地,所述针对困难样本调整神经网络回归模型m的网络结构包括以下措施:
[0044]
(8
‑
1)将神经网络回归模型m的高层特征通过双线性插值法上采样与模型m的低层特征融合;
[0045]
(8
‑
2)对(8
‑
1)中融合了神经网络回归模型低层特征和高层特征的最终特征图进行卷积和池化处理并展开,用于关键点回归任务,使神经网络回归模型m在学习示功图到凡尔开闭点的映射关系时,既能考虑神经网络低层的高分辨率特征即示功图的局部信息,还能考虑到神经网络高层的语义特征也即示功图的全局信息。
[0046]
进一步的,所述根据回归模型输出的凡尔开闭点像素坐标和归一化相关参数反推出实际有效冲程具有如下步骤:
[0047]
(10
‑
1)将实时的示功图有效数据d
r
归一化为d
norm_r
,其中:
[0048]
d
r
={(x
rj
,y
rj
)|j=1,2,...,m}
[0049]
d
norm_r
={(x
norm_rj
,y
norm_rj
)|j=1,2,...,m}
[0050]
两者间的转换关系如下:
[0051][0052]
(10
‑
2)将归一化后的数据映射至w
×
h大小的网格内并绘制成示功图后输入神经网络回归模型,则示功图像素点(a
rj
,b
rj
)和归一化后的示功图悬点及位移数据(x
norm_rj
,y
norm_rj
)的转换关系如下:
[0053]
(a
rj
,b
rj
)=(x
norm_rj
,y
norm_rj
)
×
(w,h)
[0054]
(10
‑
3)结合(10
‑
1)和(10
‑
2)可得示功图像素点(a
rj
,b
rj
)和油井现场示功图悬点及位移数据(x
rj
,y
rj
)的映射关系如下:
[0055][0056]
(10
‑
4)神经网络回归模型输出的四个凡尔开闭点像素坐标如下:
[0057]
l
r
={a
ra
,b
ra
,a
rb
,b
rb
,a
rc
,b
rc
,a
rd
,b
rd
}
[0058]
结合(10
‑
3)中建立的映射关系反推出四个凡尔开闭点实际悬点位移及载荷物理坐标如下:
[0059]
l
real_r
={x1,y1,x2,y2,x3,y3,x4,y4}
[0060]
其中(x1,y1)为固定凡尔的开启点a的悬点及位移、(x2,y2)为固定凡尔关闭点b的悬点及位移,(x3,y3)为游动凡尔开启点c的位移及载荷,(x4,y4)为游动凡尔关闭点d的位移及集合;
[0061]
(10
‑
5)根据(10
‑
4)中的四个凡尔开闭点实际悬点位移及载荷物理坐标可以计算出示功图的有效冲程s
pe
即为固定凡尔开闭点的位移差和游动凡尔开闭点的位移差中的较小值:
[0062]
s
pe
=min{x2‑
x1,x3‑
x4}。
[0063]
有益效果
[0064]
本发明公开了一种抽油机有效冲程的计算方法,该方法充分利用抽油机历史示功图数据,建立基于卷积神经网络的回归模型,实时预测示功图的四个凡尔开闭点,准确计算抽油机井的有效冲程,具有计算流程简单、实时性高和泛化能力强等特点,从而为功图量油提供坚实技术支撑。
附图说明
[0065]
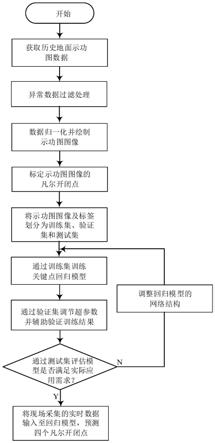
图1为本发明的抽油机有效冲程计算方法的系统流程框图;
[0066]
图2为本发明具体算例数据处预处理后的示功图;
[0067]
图3为本发明具体算例的示功图样本标签可视化图;
[0068]
图4为本发明具体算例回归模型的损失函数训练结果图;
[0069]
图5为本发明具体算例测试集困难样本示功图;
[0070]
图6为本发明具体算例调整网络结构后的回归模型损失函数训练结果图;
[0071]
图7为本发明具体算例调整网络结构后的回归模型损在困难样本上的预测结果图;
[0072]
图8为本发明具体算例油井现场若干典型工况的示功图;
[0073]
图9为本发明具体算例最终回归模型对典型工况示功图的预测结果图;
[0074]
图10为本发明具体算例最终回归模型对现场供液不足示功图的预测结果图。
[0075]
具体实施过程
[0076]
下面结合附图以及具体的算例,由具体的操作流程说明本方法在抽油机井有效冲程的实施效果。应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
[0077]
选取某原油开采企业某油井2020年1月1日到2020年1月25日期间8口抽油机井的工况数据,以此建立对抽油机凡尔开闭点的回归模型,从而验证本发明所提出的基于抽油
机示功图的有效冲程计算方法。
[0078]
本发明的总体系统流程图如图1所示,具体实施步骤如下:
[0079]
(1)获取油井现场采集到的抽油机示功图历史数据并对其进行异常数据过滤处理,得到有效工况数据集d,共计6522组,每组数据包含200个采样点:
[0080]
d={d
i
|i=1,2,...,6522}
[0081]
d
i
={(x
ij
,y
ij
)|j=1,2,...,200}
[0082]
以原始数据样本中一号油井的第一组有效数据d1为例:
[0083]
d1=[(0,50.74),(0.003,52.84),(0.009,55.29),...,(0.011,46.49),(0.003,47.06),(0,48.73)]2×
200
[0084]
(2)将有效工况数据归一化并绘制为闭合的示功图图像,得到有效示功图数据集p:
[0085]
p={p
i
|i=1,2,...,6522}
[0086]
以原始数据样本中一号油井的第一组有效数据为例:
[0087]
首先以抽油机井生产参数的最大载荷y
max
=87.91kn为纵轴最大量程,以最大冲程x
max
=5.981m为横轴最大量程对示功图原始二维数据进行坐标归一化,将原始数据转换到[0,1]的范围内,归一化结果如下:
[0088]
d
norm_1
=[(0,0.577),(0,0.601),(0.0015,0.0629),...,(0.0183,0.528),(0,0.535),(0,0.554)]2×
200
[0089]
然后,将归一化结果映射到256
×
256的网格中并进行向下取整,映射结果d
map_i
如下:
[0090]
d
map_1
=[(0,147),(0,153),(0,161),...,(4,135),(0,136),(0,141)]2×
200
[0091]
再由映射结果绘制示功图图像,绘制时以归一化并映射后的悬点位移x
map_1j
为图像的横坐标,以归一化后的悬点载荷y
map_ij
为图像的纵坐标,采用opencv库绘制曲线的方法将(x
map_i1
,y
map_i1
)与其后的一个点相连,并以此类推,将数据点两两相连至最后一个采样点(x
map_i200
,y
map_i200
),再将(x
map_i200
,y
map_i200
)与(x
map_i1
,y
map_i1
)相连,形成示功图封闭曲线,示功图大小为256
×
256,具体示功图像如图2所示;
[0092]
(3)由工艺专家为示功图数据集p标定与有效冲程相关的四个凡尔开闭点作为数据集p的标签l:
[0093]
l={l
i
|i=1,2,...,6522}
[0094]
l
i
={a
ia
,b
ia
,a
ib
,b
ib
,a
ic
,b
ic
,a
id
,b
id
}
[0095]
其中l
i
表示第i组抽油机示功图样本的标签,共6522组;其中每组标签包含4个凡尔开闭点在示功图中的像素坐标值,分别为固定凡尔开启点a的坐标(a
ia
,b
ia
)、固定凡尔关闭点b的坐标(a
ib
,b
ib
)、游动凡尔开启点c的坐标(a
ic
,b
ic
)和游动凡尔关闭点d的坐标(a
id
,b
id
),以一号油井的第一组有效数据对应的示功图为例:
[0096]
l
i
={26.52,41.56,247.09,52.85,140.93,160.47,5.78,141.54}
[0097]
可视化结果如图3所示;
[0098]
(4)将示功图数据集p按照留出法划分为训练集p
train
、验证集p
val
和测试集p
test
,对应的标签l也被划分为训练集标签l
train
、验证集l
val
和测试集l
test
,此处按照6:2:2的比例随机选取数据集p中的3913张样本组成训练集p
train
,1304张样本组成验证机p
val
,1305张样本
组成测试集p
test
;
[0099]
(5)选取resnet50深度残差网络作为神经网络回归模型m的主干网络,将resnet50最后一个bottleneck的输出通过全局池化并展开,再外接全连接层输出预测的凡尔开闭点像素坐标,选取pytorch作为深度学习网络框架。
[0100]
(6)利用训练集p
train
结合对应的训练集标签l
train
,对回归模型m进行示功图到凡尔开闭点位置映射关系的学习,并根据验证集p
val
辅助验证模型的泛化能力和调节神经网络的超参数,训练结果如图4所示;
[0101]
(7)根据候选回归模型m训练过程中,在验证集p
val
上的损失函数的最小值选取回归模型的权重参数;
[0102]
(8)通过(4)中选取的测试集p
test
评估(7)中已确定网络权重参数的候选回归模型m的最终性能,并根据测试结果挖掘困难样本,针对困难样本调整神经网络回归模型m的网络结构以达到提高回归模型性能的目的。此处采用测试集所有样本的四个凡尔开闭点预测值与实际值的欧式距离的平均值即均方根误差作为衡量回归模型最终性能的指标,具体测试结果均方根误差为0.04435,可视化结果如图5所示。
[0103]
(9)重复步骤(6)至步骤(8)直至回归模型m的性能达到工程应用要求。根据可视化的测试集预测结果,可以发现当示功图比较规整或略有缺陷时神经网络回归模型m预测结果较为准确,但当示功图存在极度不规整和频繁震荡时,神经网络回归模型m预测结果往往存在较大误差;同时,模型也存在一定的过拟合问题也即泛化能力不足。针对挖掘出的困难样本分析可知神经网络回归模型resnet50的输出层特征具有很强的语义信息,但分辨率很低,对示功图细节的感知能力较差,在resnet50池化层下采样的影响下,神经网络低层的高分率信息包括更多的位置、细节信息都有所丢失,因此导致最终关键点的回归缺失细节性的信息而有所偏差。此处先采用将神经网络回归模型m的主干网络resnet50高层bottleneck的输出特征通过1x1的卷积核和双线性插值法上采样至前一层bottleneck的输出特征的尺寸,再将两个输出特征逐元素相叠加,然后迭代重复此操作直至resnet50的第一个bottleneck,最后再将叠加后的特征通过卷积层和池化层处理并展开作为最终凡尔开闭点回归的特征输入,此时叠加后的特征层既包含神经网络高层的语义信息又包含低层的轮廓及位置信息,在测试集上的均方根误差为0.04123,下降了7个百分点的同时也解决示功图极度不规整和频繁震荡时预测误差大的问题,测试可视化结果如图6所示。
[0104]
(10)获取油井现场采集到的实时悬点位移及载荷并对其进行异常数据过滤和归一化处理,将结果绘制成示功图并转换成resnet50要求的输入格式,此处选取了油井现场若干典型工况的的数据,经过以上的预处理步骤后生成的示功图如图7所示,输入至最终回归模型,回归模型的输出结果如图8所示,再根据回归模型输出的凡尔开闭点像素坐标和归一化相关参数反推出实际有效冲程,以图9示功图为例,该示功图是典型供液不足的示功图,回归模型的输出如下:
[0105]
l={30,39,211,40,127,113,5,107}
[0106]
结合公式以及实际生产参数如下:
[0107][0108]
x
max
=5.981m
[0109]
y
max
=87.91kn
[0110]
w=256
[0111]
h=256
[0112]
从而反推出实际的凡尔开闭点坐标为:
[0113]
l
real
={0.7,13.39,4.93,13.74,0.12,36.74,2.97,38.8}
[0114]
最后根据预测的凡尔开闭的实际坐标计算有效冲程:
[0115]
s
pe
=min{x2‑
x1,x3‑
x4}=min{4.93
‑
0.7,2.97
‑
0.12}=2.85m
[0116]
实际现场工况的有效冲程为2.71m,误差为在可接受范围内。
[0117]
由上述分析可知,本发明的抽油机有效冲程的计算方法,能够根据示功图预测抽油机的凡尔开闭点,并计算抽油机井的有效冲程。可见,通过本发明可以实现快速、高效的抽油机凡尔开闭点预测和抽油机井有效冲程计算,避免了传统五点法计算误差大,可靠性低,甚至难以使用的情况。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1